

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 621.3.076
ЗАКОНИ КЕРУВАННЯ ВЕНТИЛЬНО-ІНДУКТОРНИМ ДВИГУНОМ НА ОСНОВІ МІНІМІЗАЦІЇ ЛОКАЛЬНИХ ФУНКЦІОНАЛІВ МИТТЄВИХ ЗНАЧЕНЬ ЕНЕРГІЙ
,
Національний технічний університет України "Київський політехнічний інститут"
пр. Перемоги, 37, м. Київ, 03056, Україна. Е-mail: *****@***ru
Мета роботи полягає у підвищенні якості керування вентильно-індукторним двигуном тягового електропривода в умовах параметричних та координатних збурень. Закони керування вентильно-індукторним двигуном розроблено на основі концепції зворотної задачі динаміки в поєднанні з мінімізацією локальних функціоналів миттєвих значень енергій. В основу методу покладена ідея зворотності прямого метода Ляпунова по дослідженню стійкості, що дозволяє знаходити закони керування, при яких замкнутий контур має наперед задану функцію Ляпунова. В якості функції Ляпунова виступає миттєве значення енергії. Характерною особливістю оптимізації є досягнення не абсолютного мінімуму функціонала якості, як в традиційних системах, а деякого мінімального значення, що забезпечує допустиму за технічними вимогами динамічну похибку системи. Це забезпечує динамічну декомпозицію взаємозв’язаної системи на незалежні локальні контури керування та слабку чутливість до зміни параметрів двигуна. Простота реалізації законів керування обумовлюється відсутністю операцій диференціювання.
Ключові слова: вентильно-індукторний двигун, закони керування.
АКТУАЛЬНІСТЬ РОБОТИ. В теперішній час в тяговому електроприводі найчастіше використовуються асинхронні двигуни та синхронні двигуни з постійними магнітами. Недоліком асинхронного електропривода є невеликий, близько 1:2, діапазон керування швидкістю в зоні послаблення поля внаслідок різкого збільшення втрат, а також проблема відводу основного тепла, що виділяється в роторі. Недолік синхронного електропривода з постійними магнітами полягає у відсутності керування полем збудження. Зменшення магнітного потоку можливо реалізувати за допомогою відповідного керування струмом статора, проте воно пов’язане з ризиком виходу з ладу силового перетворювача. Двигун має підвищену вартість та трудомісткість виготовлення.
В таких умовах перспективним може бути тяговий електропривод на основі вентильно-індукторного двигуна з незалежним збудженням [1], який з точки зору керування наближається до класичного синхронного двигуна, проте без ковзних контактів. Діапазон послаблення поля може досягати 1:8, що дозволяє значно розширити зону керування з постійною потужністю. Конструкція двигуна забезпечує простий відвід тепла та високу технологічність при виготовленні. Внаслідок нагрівання чи зміни кінематики механізму параметри електродвигуна та електропривода можуть змінюватися. При визначені параметрів схеми заміщення двигуна за паспортними даними виникають похибки, обумовлені допущеннями в методиці обчислень. За своєю природою вентильно-індукторний двигун, як і інші типи двигунів змінного струму, є взаємозв’язаним об’єктом. Керування координатами електропривода в таких умовах пов’язане з компенсацією впливу координатних збурень та дії вихрових струмів. Вирішення цих задач класичними методами підвищує громіздкість системи внаслідок додаткових алгоритмів ідентифікації, адаптації чи компенсації.
Метою роботи є підвищення якості керування вентильно-індукторним двигуном в умовах невизначеності математичної моделі шляхом розробки законів керування на основі концепції зворотних задач динаміки в поєднанні з мінімізацією локальних функціоналів миттєвих значень енергій [2,3], що забезпечує слабку чутливість до параметричних та координатних збурень, динамічну декомпозицію взаємозв’язаної системи, простоту практичної реалізації.
МАТЕРІАЛ І РЕЗУЛЬТАТИ ДОСЛІДЖЕНЬ. У основу роботи покладена ідея зворотності прямого метода Ляпунова по дослідженню стійкості, що дозволяє знаходити закон керування, при якому замкнутий контур має наперед задану функцію Ляпунова. В якості функції Ляпунова виступає миттєве значення енергії. Отриманий закон надає замкнутій системі властивість стійкості в цілому, що дозволяє вирішувати задачі керування взаємозв'язаними, нелінійними об'єктами, як для лінійних систем по математичних моделях локальних контурів. Характерною особливістю оптимізації є досягнення не абсолютного мінімуму функціонала якості, як в традиційних системах, а деякого мінімального значення, що забезпечує допустиму за технічними вимогами динамічну похибку системи [3].
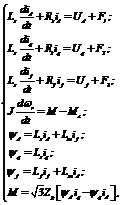
Динамічна модель вентильно-індукторного двигуна у системі координат (d-q), орієнтованій по магнітній осі ротора, представляється відомою взаємозв'язаною системою рівнянь (1)
| (1) |
де ![]() ,
,![]() та
та ![]() ,
,![]() – струми та напруги статора по осям d і q;
– струми та напруги статора по осям d і q; ![]() та
та ![]() – струм та напруга збудження;
– струм та напруга збудження;
![]() ,
,![]() – кутова і електрична швидкість ротора;
– кутова і електрична швидкість ротора; ![]() – число пар полюсів;
– число пар полюсів; ![]() ,
,![]() – електромагнітний момент двигуна і момент навантаження;
– електромагнітний момент двигуна і момент навантаження; ![]() ,
, ![]() ,
,![]() – потокозчеплення по осям d і q та обмотки збудження;
– потокозчеплення по осям d і q та обмотки збудження; ![]() ,
,![]() ,
,![]() – індуктивність фази, обмотки збудження та взаємна індуктивність;
– індуктивність фази, обмотки збудження та взаємна індуктивність; ![]() ,
,  ,
, ![]() – координатні збурення;
– координатні збурення; ![]() – момент інерції;
– момент інерції; ![]() ,
, ![]() – активний електричний опір обмотки статора та збудження.
– активний електричний опір обмотки статора та збудження.
Координатні збурення F1, F2, F3 трактуються як невизначені, проте обмежені по величині ![]() ,
, ![]() ,
, ![]() . Рівня керуючих напруг
. Рівня керуючих напруг ![]() ,
, ![]() ,
, ![]() достатньо для їх парирування. Система керування складається з трьох незалежних контурів регулювання: струму збудження
достатньо для їх парирування. Система керування складається з трьох незалежних контурів регулювання: струму збудження ![]() ; струму статора
; струму статора ![]() по осі q, який визначає тяговий момент двигуна; струму статора
по осі q, який визначає тяговий момент двигуна; струму статора ![]() по осі d, магнітний потік від якого може як підмагнічувати так і розмагнічувати основний потік від обмотки збудження. При необхідності керувати не тільки тяговим моментом двигуна (основне призначення електропривода), а й швидкістю, система може бути доповнена контуром регулювання кутової швидкості двигуна
по осі d, магнітний потік від якого може як підмагнічувати так і розмагнічувати основний потік від обмотки збудження. При необхідності керувати не тільки тяговим моментом двигуна (основне призначення електропривода), а й швидкістю, система може бути доповнена контуром регулювання кутової швидкості двигуна ![]() .
.
Система рівнянь (1) дозволяє розробити систему векторного керування вентильно-індукторним двигуном з орієнтацією до положення ротора. Об'єкт локального контуру керування струмом статора ![]() згідно з першим рівнянням системи (1) описується лінійним диференціальним рівнянням першого порядку, на який діє керуюча напруга
згідно з першим рівнянням системи (1) описується лінійним диференціальним рівнянням першого порядку, на який діє керуюча напруга ![]() та збурення
та збурення ![]() . Бажане рівняння замкнутого контуру струму
. Бажане рівняння замкнутого контуру струму ![]() , за допомогою якого встановлюються задані показники якості керування, також задається рівнянням першого порядку [3]
, за допомогою якого встановлюються задані показники якості керування, також задається рівнянням першого порядку [3]
| (2) |
де ![]() – заданий струм. Рівняння забезпечує астатизм першого порядку за керуючою дією та тривалість монотонного перехідного процесу струму рівну
– заданий струм. Рівняння забезпечує астатизм першого порядку за керуючою дією та тривалість монотонного перехідного процесу струму рівну![]() , яка задається величиною коефіцієнта рівняння
, яка задається величиною коефіцієнта рівняння![]() .
.
Ступінь наближення реального процесу керування струмом до бажаного оцінюється функціоналом, який характеризує нормовану за індуктивністю миттєву енергію магнітного поля від першої похідної струму
| (3) |
Мінімізація функціонала здійснюється за градієнтним законом першого порядку
| (4) |
де ![]() – константа.
– константа.
Після підстановки (1) та (3) в (4) знаходиться закон керування струмом ![]()
| (5) |
де ![]() – коефіцієнт підсилення регулятора.
– коефіцієнт підсилення регулятора.
Змінна ![]() в законі керування (5) виступає в ролі необхідної похідної струму, яка знаходиться в реальному часі з рівняння (2) шляхом замикання зворотним зв’язком за складовою струму
в законі керування (5) виступає в ролі необхідної похідної струму, яка знаходиться в реальному часі з рівняння (2) шляхом замикання зворотним зв’язком за складовою струму ![]()
| (6) |
Після інтегрування обох частин рівняння (5) з урахуванням (6) закон керування складовою струму ![]() приймає остаточний вигляд
приймає остаточний вигляд
| (7) |
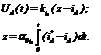
На відміну від класичних законів керування, представлений закон (7) не містить параметрів об’єкту керування (1), а вміщує тільки параметр ![]() бажаного рівняння якості (2).
бажаного рівняння якості (2).
Диференціальне рівняння замкнутого контуру керування струмом ![]() з законом керування (7)
з законом керування (7)
| (8) |
показує, що процес керування є асимптотично стійким згідно до критерію Гурвіца:  ,
, ![]() . Стійкість контуру керування зберігається при необмеженому підвищенні коефіцієнта підсилення регулятора
. Стійкість контуру керування зберігається при необмеженому підвищенні коефіцієнта підсилення регулятора ![]() та забезпечує повне співпадіння реального (8) та бажаного (2) процесів керування, що очевидно при діленні всіх членів рівняння (8) на коефіцієнт
та забезпечує повне співпадіння реального (8) та бажаного (2) процесів керування, що очевидно при діленні всіх членів рівняння (8) на коефіцієнт ![]() . Ця особливість забезпечує динамічну декомпозицію та слабку чутливість до параметричних збурень. Під час роботи взаємозв’язана система розпадається на незалежні локальні контури керування, процеси в яких протікають по траєкторіям, назначеним рівняннями бажаної якості виду (2). Звичайно, при допустимому з точки зору технічної реалізації коефіцієнті підсилення існує похибка керування, допустима величина якої встановлюється технічними вимогами.
. Ця особливість забезпечує динамічну декомпозицію та слабку чутливість до параметричних збурень. Під час роботи взаємозв’язана система розпадається на незалежні локальні контури керування, процеси в яких протікають по траєкторіям, назначеним рівняннями бажаної якості виду (2). Звичайно, при допустимому з точки зору технічної реалізації коефіцієнті підсилення існує похибка керування, допустима величина якої встановлюється технічними вимогами.
На основі другого рівняння системи (1) за аналогічною методикою отримується закон керування струмом статора![]() , який пропорційний моменту двигуна
, який пропорційний моменту двигуна
| (9) |
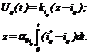
Як видно з (9), закон керування струмом статора![]() також не містить параметрів об’єкту (1), а вміщує тільки параметр
також не містить параметрів об’єкту (1), а вміщує тільки параметр ![]() бажаного рівняння якості виду (2).
бажаного рівняння якості виду (2).
Аналогічно на основі третього рівняння системи (1) отримується закон керування струмом збудження ![]()
| (10) |
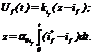
Закон керування струмом збудження ![]() не містить параметрів об’єкту (1), а вміщує тільки параметр
не містить параметрів об’єкту (1), а вміщує тільки параметр ![]() бажаного рівняння якості виду (2).
бажаного рівняння якості виду (2).
Закон керування швидкістю двигуна розроблюється на основі четвертого рівняння системи (1) при мінімізації енергії прискорення маси
| (11) |
Контур регулювання швидкістю двигуна є зовнішнім відносно внутрішнього контуру керування струмом ![]() , тому для зменшення впливу динаміки останнього на якість керування швидкістю коефіцієнти регуляторів вибираються за умови
, тому для зменшення впливу динаміки останнього на якість керування швидкістю коефіцієнти регуляторів вибираються за умови ![]() .
.
Отриманий закон керування швидкістю (11) забезпечує астатизм першого порядку. Якщо необхідно мати астатизм другого порядку, то закон керування розроблюється за рівнянням бажаної якості виду (2) другого порядку
| (12) |
В результаті закон керування швидкістю приймає вигляд
| (13) |
Цей закон керування також містить тільки параметри α0w, α1w бажаного закону керування (12), за допомогою яких встановлюється бажаний вид, перерегулювання та час перехідного процесу швидкості.
Із передаточної функції розімкнутого контуру швидкості для закону керування (13)
| (14) |
видно, що контур володіє заданим астатизмом другого порядку та добротністю за прискоренням рівній заданій
| (15) |
Виконання умови (15) [3] забезпечує допустиму похибку керування швидкістю при помірному коефіцієнті підсилення регулятора швидкості ![]() .
.
ВИСНОВКИ. Закони керування вентильно-індукторним двигуном на основі концепції зворотних задач динаміки в поєднанні з мінімізацією локальних функціоналів миттєвих значень енергій забезпечують високу динамічну точність, динамічну декомпозицію взаємозв’язаної системи на локальні підсистеми, слабку чутливість до зміни параметрів та координатних збурень. Особливістю законів керування є відсутність операцій диференціювання змінних та параметрів об’єктів, що обумовлює простоту практичної реалізації.
ЛІТЕРАТУРА
1. , Лашкевич -индукторный электропривод с независимым возбуждением для тягового применения // Электротехнические и компьютерные системы. – 2011. – № 03(79). – С. 138-139.
2. Крутько устойчивые структуры управляемых систем высокой динамической точности. Алгоритмы и динамика управления движением модельных объектов // Изв. РАН. ТиСУ. – 2005. – № 2. – С. 120-140.
3. , Бурик координатами электроприводов на основании концепции обратных задач динамики при минимизации локальных функционалов мгновенных значений энергий // Электротехника и электроэнергетика. – Запорожье: ЗНТУ, 2011. – № 1. – С. 41-49.
CONTROL LAWS OF SWITCHED RELUCTANCE MOTOR BASED ON THE MINIMIZATION LOCAL FUNCTIONALS OF INSTANT ENERGY VALUES
N. Ostroverkhov, V. Pyzhov
National Technical University of Ukraine "Kiev polytechnic institute"
Peremohy Avenue, 37, Kiev, 03506, Ukraine. E-mail: *****@***ru
The purpose of this article is to increase the control quality of a switched reluctance motor of a traction electric drive under parametric and coordinate disturbances. The control laws of a switched reluctance motor are developed based on a conception of reverse task of dynamics in combination with minimization of local functionals of instantaneous values of energies. The proposed method is based on an idea of the reversibility of the Lyapunov direct method for the stability analysis, which allows determining control laws in case a closed loop has the predetermined Lyapunov function. The instantaneous value of energy is used as the Lyapunov function. The specificity of optimization is not obtaining the absolute minimum of the quality functional, as usually used in traditional systems, but rather getting a certain minimal value which would assure a technically allowable dynamic error of the system. This allows a dynamic decomposition of an interrelated system by independent closed loops, as well as a lesser sensitivity to variation of the motor’s parameters. The simplicity of realization of control laws is caused by the absence operation of differentiation.
Key words: switched reluctance motor, control laws.
REFERENCES
1. Коzаchenko V., Lashkevich М. (2011), “Electric drive with switched reluctance motor with independent excitation for hauling application”, Elektrotehnicheskie i kompyuternyie sistemy, Vol. 03(79), pp. 138–139.
2. Krut’ko P. D. (2005), “Robustly stable structures of control systems of high dynamic precision. Algorithms and dynamics of control of model objects”, Izvestija RAN. TiSU, Vol. 2, pp. 120–140.
3. Ostroverkhov N., Buryk N. (2011), “Сontrol of coordinates electric drives based on the concept of inverse dynamics problems for minimization local functionals momentary values of energy”, Elektrotehnika i elektroenergetika, Vol. 1, pp. 41–49.
