
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УСЛОВИЯ ПРОЯВЛЕНИЯ ЭФФЕКТА РЕДКОЙ ВЫБОРКИ ПРИ ОЦЕНКЕ НАПРАВЛЕННЫХ СВЯЗЕЙ ПО ВРЕМЕННЫМ РЯДАМ
1, 2, 1,2
1 Саратовский Государственный Университет им. ,
2 - Саратовский филиал ИРЭ им. РАН
E-mail: krylov. *****@***ru
Изучение взаимодействий между колебательными системами представляет собой важную задачу в самых разных областях науки и техники [1,2], включая геофизику и нейрофизиологию. Особенно часто необходимо оценить насколько сильно влияние одного наблюдаемого процесса на другой. Причинность по Грейнджеру при такой постановке задачи - наиболее часто используемый подход [3]. Система Y является “причиной по Грейнджеру” (влияет) на систему X, если прогноз будущего поведения X с учетом данных Y точнее по сравнению с прогнозом, основанном только на учете данных о системе X. Ненулевое улучшение прогноза (PI) обычно понимают как наличие физического воздействия Y на X, а ненулевое PI "в обе стороны" понимают как признак двунаправленной связи. Прогноз осуществляется на один временной шаг (или интервал выборки Δt) вперед. Ранее в математических работах было показано, что при достаточно редкой выборке (т. е. большом Δt) даже в случае однонаправленной связи, может наблюдаться ненулевое PI в обе стороны, что может привести к ложным срабатываниям (ложному выявлению связей)[4]. Тем не менее, до сих пор остается неясным насколько типично и сильно влияние эффекта редкой выборки с физической точки зрения. Данная работа посвящена поиску таких условий на примере простой математической системы, являющейся моделью широкого класса колебательных систем.
А именно, в данной работе используются линейные стохастические диссипативные осцилляторы с однонаправленной связью, описанные стохастическими разностными уравнениями [5]:
![]() (1),
(1),
где коэффициент![]() (2),
(2), ![]() (3),
(3),
b1 и b2 вычисляются через Ty and τy по аналогии с a1 и a2 соответственно,
ξ - Гауссовские взаимно некоррелированные белые шумы с дисперсией принятой за 1. T в формулах для коэффициентов - период, а τ - время релаксации колебаний. Коэффициент связи k является переменной величиной. Также в данной работе переменными являются индивидуальные параметры осцилляторов (а именно, фиксированное соотношение временных масштабов r1 и r2 - такое, что,![]() и ) для изучения случаев идентичных систем (при r1 = 1), близких (r1 = 1.5 или 0.8 что означает влияние “быстрого” процесса на “медленный” и наоборот) и отличающихся (r1 > 5). Значения PI вычисляются точно (без помощи метода статистической оценки временных рядов) через определители матриц ковариаций двумерного процесса (1), который находим, решая линейные дифференциальные уравнения для моментов второго порядка[6]. Этот расчет проводится для разных интервалов выборки больших единицы для того, чтобы симулировать низкое временное разрешение прореженных данных. Рассматривается вариант “простого” прореживания, где из имеющихся данных выбираются отдельные i-ые точки, где i - натуральное число. Под большими PI будем понимать PI>>0.01.
и ) для изучения случаев идентичных систем (при r1 = 1), близких (r1 = 1.5 или 0.8 что означает влияние “быстрого” процесса на “медленный” и наоборот) и отличающихся (r1 > 5). Значения PI вычисляются точно (без помощи метода статистической оценки временных рядов) через определители матриц ковариаций двумерного процесса (1), который находим, решая линейные дифференциальные уравнения для моментов второго порядка[6]. Этот расчет проводится для разных интервалов выборки больших единицы для того, чтобы симулировать низкое временное разрешение прореженных данных. Рассматривается вариант “простого” прореживания, где из имеющихся данных выбираются отдельные i-ые точки, где i - натуральное число. Под большими PI будем понимать PI>>0.01.
Первый случай (идентичные системы) — системы, у которых величина ![]() . Максимумы значений G в «ложную» сторону достигали значительной величины в 0.08, при этом анализ плоскости параметров, подобных рис. 2а, где на осях отложены величины
. Максимумы значений G в «ложную» сторону достигали значительной величины в 0.08, при этом анализ плоскости параметров, подобных рис. 2а, где на осях отложены величины ![]() и
и ![]() выявил, что максимумы наблюдались при величине
выявил, что максимумы наблюдались при величине  и
и ![]() . Исследование графиков подобных рис. 2б показывает наличие колебания PI в обе стороны с локальными минимумами в
. Исследование графиков подобных рис. 2б показывает наличие колебания PI в обе стороны с локальными минимумами в ![]() , где n - натуральное число.
, где n - натуральное число.
Во втором случае (близкие системы), где ![]() , например
, например ![]() поведение PI в «ложную» сторону похожее. Однако в данном случае максимумы значений PI в ложную сторону достигают лишь порядка 0.1. Точную величину параметра
поведение PI в «ложную» сторону похожее. Однако в данном случае максимумы значений PI в ложную сторону достигают лишь порядка 0.1. Точную величину параметра ![]() для данного случая назвать нельзя, но практическое исследование показывает, что большие значения величины PI в «ложную» сторону достигаются при
для данного случая назвать нельзя, но практическое исследование показывает, что большие значения величины PI в «ложную» сторону достигаются при ![]() и
и ![]() .
.
В третьем случае (различные системы), где ![]() , например
, например ![]() . Величина PI в «ложную» сторону уменьшается, однако и в «правильном» направлении а именно влияние X на Y сторону, PI также существенно меньше, что позволяет сделать вывод о снижении точности метода. Максимумы PI в «ложную» сторону достигают лишь порядка 0.001. Значения
. Величина PI в «ложную» сторону уменьшается, однако и в «правильном» направлении а именно влияние X на Y сторону, PI также существенно меньше, что позволяет сделать вывод о снижении точности метода. Максимумы PI в «ложную» сторону достигают лишь порядка 0.001. Значения ![]() и
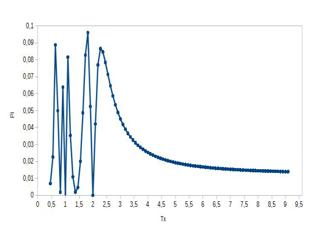
и ![]() аналогичны случаю близких систем. На рисунке ниже представлены типичные примеры графиков, по которым проводились исследования. Слева представлена плоскость, где цветом показана величина PI в ложную сторону, а на осях отложены нормированные на интервал выборки значения периода и времени релаксации ведущего осциллятора. Для данного примера это 11. Справа представлен разрез плоскости при τ = 8,636
аналогичны случаю близких систем. На рисунке ниже представлены типичные примеры графиков, по которым проводились исследования. Слева представлена плоскость, где цветом показана величина PI в ложную сторону, а на осях отложены нормированные на интервал выборки значения периода и времени релаксации ведущего осциллятора. Для данного примера это 11. Справа представлен разрез плоскости при τ = 8,636
|
Рис. 1 Δt =11, r1 = 1, r2 = 1 |
Итак, в результате численных экспериментов построены итоговые диаграммы, иллюстрирующие условия для значительного эффекта редкой выборки. Они наглядно показывают, что изучаемый эффект может быть достаточно силен для реальных ситуаций и должен быть принят во внимание при анализе временных рядов связанных систем на практике.
Работа выполнена при поддержке РФФИ (гранты , ), гранта Президента России (Н. Ш. 1726.2014.2).
Библиографический список
1. Pikovsky A. S., Rosenblum M. G., and Kurths J.// Synchronization: A Universal Concept in Nonlinear Sciences (Cambridge University Press, Cambridge, 2001).
2. Anishchenko V. S., Astakhov V. V., Neiman A. B.,Vadivasova N. E., Schimanski-Geier L.// Nonlinear dynamics of chaotic and stochastic systems (Springer-Verlag, Berlin 2002).
3. Granger C. W.J.// Econometrica
4. Smirnov D. A., Bezruchko B. P.// Europhys. Lett. .
5. Timmer J., Lauk M., Pfleger W., and Deuschl G.// Biol. Cybern.
6. Smirnov D. A.// Phys. Rev. E,7.
Сведения об авторах
- студент,
– д. ф.-м. н., в. н.с ИРЭ им. А,
– д. ф.-м. н., профессор, г.
Вид доклада: стендовый
