
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
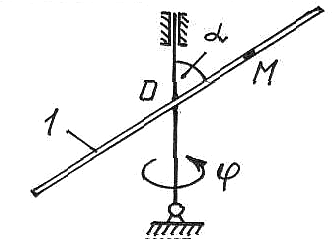
4.Сложное движение точки
| ПАКЕТ | Исходные данные | ||||
Уравнение вращения тела 1 j = j(t), рад | Уравнение относительного движения точки OM = S = S(t), cм | t1, с | b, cм | R, cм | a, град. | |
1 | 0,6t2 | 10 sin(p t/6) | 6 | – | – | 60 |
2 | 0,6t2 | 10 sin(p t/6) | 8 | – | – | 60 |
3 | 0,6t2 | 10 sin(p t/6) | 12 | – | – | 60 |
4 | 0,6t2 | 10 sin(p t/6) | 18 | – | – | 60 |
5 | 0,6t2 | 10 sin(p t/6) | 24 | – | – | 60 |
6 | 0,6t2 | 10 sin(p t/6) | 30 | – | – | 60 |
7 | 0,6t2 | 10 sin(p t/6) | 36 | – | – | 60 |
8 | 0,6t2 | 10 sin(p t/6) | 1/6 | – | – | 60 |
9 | 0,6t2 | 10 sin(p t/6) | 1/8 | – | – | 60 |
0 | 0,6t2 | 10 sin(p t/6) | 1/12 | – | – | 60 |
При известном законе переносного вращения je = je(t) и уравнения относительного движения точки Sr = Sr(t), для момента времени t1, определить модуль и направление вектора абсолютной скорости ( |
ПОРЯДОК ВЫПОЛНЕНИЯ ЗАДАНИЯ
1. На расчетной схеме показать все линейные и угловые скорости и ускорения.
2. Записать все кинематические соотношения.
3. Выполнить все расчеты сначала в общем виде и затем в численном виде.
ДОПОЛНИТЕЛЬНЫЕ УКАЗАНИЯ:
1. Вы можете использовать приведенную в файле задания схему механической системы как заготовку для обработки её в графическом редакторе (например, PAINT или другом).
2. При использовании MATHCAD перенесите составленный графический объект в РАБОЧИЙ ЛИСТ.
ОТЧЕТ ПО РАБОТЕ:
1. Составьте отчет по работе в обычном (бумажном) виде или в электронном виде.
2. Укажите в отчете НОМЕР ЗАДАНИЯ, НОМЕР ПАКЕТА и КОНТРОЛЬНЫЙ КОД (четырехзначное число).
