

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 681.51
Д. С. БОРОВИЦКИЙ[1]
(ОАО “Российский институт радионавигации и времени”, С.-Петербург)
Разработка варианта гидроакустического сигнала системы подводной навигации в условиях быстрых замираний в канале
Рассматривается вариант построения гидроакустического сигнала системы позиционирования объектов в водной среде при условии быстрых замираний. Производится выбор структуры сигнала и способа модуляции посылки. Предлагается вариант построения преамбулы сигнала. Рассматриваются вопросы рационального кодирования передаваемых данных.
Введение
Навигационные гидроакустические системы являются незаменимым инструментом в рамках задачи обеспечения координатно-временного и навигационного обеспечения подводных объектов наряду с глобальными навигационными спутниковыми системами, такими как GPS и ГЛОНАСС. Подобные системы, в частности, включают в себя радиогидроакустические буи для определения координат, и установленная на них аппаратура спутниковой навигационной системы вырабатывает данные о географических координатах, точном времени и пр., которые могут быть переданы на объект по гидроакустическому каналу.
Предлагаемый доклад посвящен разработке гидроакустического сигнала системы подводной навигации в условиях быстрых замираний в канале.
Выбор параметров гидроакустического сигнала
Постановка задачи. Задачей исследования является разработка гидроакустического сигнала системы подводной навигации в условиях быстрых замираний в канале. Параметры и требования к разрабатываемому сигналу устанавливаются заданием:
1. В зависимости от гидрологии конкретного района, а также расстояния объекта от отражающей (рассеивающей) поверхности задержка второго энергозначимого луча (многолучевой помехи) относительно основного лежит в диапазоне от 1 до 500-600 мс, при этом отношение энергий первого и второго лучей может составлять 3-10 дБ;
2. Значение приемлемой несущей частоты сигнала ![]() составляет
составляет ![]() кГц и
кГц и ![]() кГц для дистанций м и м соответственно;
кГц для дистанций м и м соответственно;
3. Приемлемая относительная ширина спектра сигнала ![]() , определяемая возможностями излучающего тракта, а также полосой пропускания гидроакустического канала
, определяемая возможностями излучающего тракта, а также полосой пропускания гидроакустического канала ![]() , равна примерно 3 и 9 кГц для несущих 10 и 30 кГц соответственно;
, равна примерно 3 и 9 кГц для несущих 10 и 30 кГц соответственно;
4. Отношение сигнал-шум в полосе сигнала ![]() дБ;
дБ;
5. Необходимая скорость передачи информации ![]() кбит/с.
кбит/с.
Выбор способа модуляции гидроакустического сигнала. Существенным фактором распространения гидроакустического сигнала, с которым необходимо считаться, являются замирания в канале. Если флюктуации являются быстрыми, то характеристики канала меняются от символа к символу. Таким образом, можно сделать вывод, что канал не сможет сохранить когерентность сигнала и, значит, на приемной стороне принятые информационные посылки будут иметь случайные независимые фазы. В этом случае значения начальных фаз не могут быть использованы для различения передаваемых сообщений, и отличительный признак сигналов должен строиться не на основе фазового сдвига. Ситуации, отвечающие подобному положению, известны под названием некогерентного приема. Известно, что при некогерентном приеме ортогональные сигналы являются строго оптимальными вне зависимости от их числа. Одним из наиболее популярных видов ортогональных сигналов являются частотно-модулированные сигналы (MFSK - Multiple Frequency Shift Keying), при использовании которых информационные символы представляют собой посылки разных частот.
Пропускная способность канала с MFSK может быть оценена из следующих соображений. Будем исходить из того, что когерентная обработка сигнала должна распространяться на максимально возможный временной интервал, т. е. время когерентности ![]() , поскольку любое разбиение интервала
, поскольку любое разбиение интервала ![]() на некогерентные отрезки снизит надежность передачи данных [1]. Иначе говоря, длительность кодового символа
на некогерентные отрезки снизит надежность передачи данных [1]. Иначе говоря, длительность кодового символа ![]() следует положить равной
следует положить равной ![]() :
: ![]() . В рамках доступного таким образом частотно-временного ресурса (полоса
. В рамках доступного таким образом частотно-временного ресурса (полоса ![]() , отведенное время
, отведенное время ![]() ) можно иметь
) можно иметь ![]() ортогональных сигналов (в частности, гармоник MFSK), реализовав
ортогональных сигналов (в частности, гармоник MFSK), реализовав ![]() -ичное кодирование. Тогда, исходя из данных рассуждений, можно получить выражений для пропускной способности канала в битах в секунду:
-ичное кодирование. Тогда, исходя из данных рассуждений, можно получить выражений для пропускной способности канала в битах в секунду:
![]()
где ![]() − энтропия двоичного ансамбля, а
− энтропия двоичного ансамбля, а
вероятность символьной ошибки, где ![]() − символьное отношение сигнал-шум, связанное с отношением сигнал-шум в полосе канала
− символьное отношение сигнал-шум, связанное с отношением сигнал-шум в полосе канала ![]() как
как  . Зависимости пропускной способности на единицу полосы от символьного отношения сигнал-шум в децибелах для нескольких значений
. Зависимости пропускной способности на единицу полосы от символьного отношения сигнал-шум в децибелах для нескольких значений ![]() показаны на рис. 1. Как можно видеть, при малых отношениях сигнал-шум в полосе
показаны на рис. 1. Как можно видеть, при малых отношениях сигнал-шум в полосе ![]() и допустимой низкой спектральной эффективности преимущество в пропускной способности имеют форматы с большим числом частот. В то же время с улучшением энергетики канала для повышения спектральной эффективности разумно использовать умеренное число частот, а именно
и допустимой низкой спектральной эффективности преимущество в пропускной способности имеют форматы с большим числом частот. В то же время с улучшением энергетики канала для повышения спектральной эффективности разумно использовать умеренное число частот, а именно ![]() или
или ![]() . Вообще, при стремлении шума к нулю
. Вообще, при стремлении шума к нулю  , так что в бесшумном канале оптимальным среди натуральных размером алфавита оказывается
, так что в бесшумном канале оптимальным среди натуральных размером алфавита оказывается 
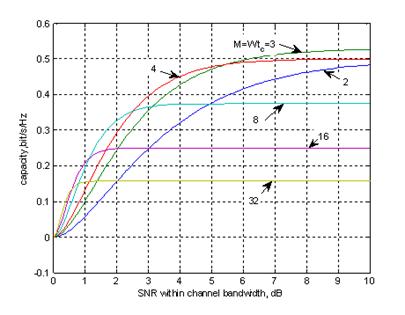
Рис.1. Пропускная способность некогерентной MFSK
Структура гидроакустического сигнала. Первым фрагментом структуры служит преамбула в виде псевдослучайной последовательности (ПСП) с хорошими автокорреляционными свойствами, служащая для обнаружения сигнала и измерения времени его прихода. За преамбулой следует поток цифровой информации, передаваемой с помощью частотной манипуляции (MFSK) и канального кода со скоростью ![]() 1/3.
1/3.
Преамбула гидроакустического сигнала. Доплеровский сдвиг в данном случае не оказывает существенного влияния. Действительно, доплеровский сдвиг не превысит сотен герц (![]() ), тогда как полоса сигнала имеет порядок единиц килогерц, что исключает влияние доплера на передаваемый сигнал. Тогда в качестве преамбулы целесообразно применять сигналы размера
), тогда как полоса сигнала имеет порядок единиц килогерц, что исключает влияние доплера на передаваемый сигнал. Тогда в качестве преамбулы целесообразно применять сигналы размера ![]() , где
, где ![]() [3,4]. Одним из широко используемых вариантов представления ЧМ сигнала является задание его помощью решетки размерности
[3,4]. Одним из широко используемых вариантов представления ЧМ сигнала является задание его помощью решетки размерности ![]() , в которой горизонтальное и вертикальное направления отождествлены соответственно со временем и частотой, причем
, в которой горизонтальное и вертикальное направления отождествлены соответственно со временем и частотой, причем ![]() определяет размер частотного алфавита (т. е. число частот, используемых при манипуляции). Ключевое требование к
определяет размер частотного алфавита (т. е. число частот, используемых при манипуляции). Ключевое требование к ![]() ЧМ преамбуле – надежное обнаружение главного пика на выходе приемного устройства. Выбор параметров преамбулы можно осуществить задавшись вероятностями ошибок обнаружения главного пика в предположении достаточно малого уровня боковых лепестков.
ЧМ преамбуле – надежное обнаружение главного пика на выходе приемного устройства. Выбор параметров преамбулы можно осуществить задавшись вероятностями ошибок обнаружения главного пика в предположении достаточно малого уровня боковых лепестков.
Отобранные решетки при ![]() кГц и
кГц и ![]() мс, а также вероятностей ложной тревоги и пропуска
мс, а также вероятностей ложной тревоги и пропуска ![]() и 0,05, соответственно, приведены в табл. 1. Для случая
и 0,05, соответственно, приведены в табл. 1. Для случая ![]() кГц решетки имеют вид
кГц решетки имеют вид ![]() , т. е. решеток без совпадений.
, т. е. решеток без совпадений.
Таблица 1
Частотные решетки для преамбулы гидроакустического сигнала
| Решетка |
|
| 1,2,2,1,3,4,3,5,6,4,2,3 | -21,6 |
| 1,2,3,4,5,6,6,5,4,2,1,3,6,3 | -22,9 |
| 1,2,3,4,5,6,6,5,4,2,1,3,6,3,1 | -23,5 |
| 1,2,3,4,5,6,6,5,4,2,1,3,6,3,1,5 | -18,1 |
| 1,2,3,4,5,6,6,5,4,2,1,3,6,3,1,5,2 | -18,6 |
| 1,2,3,4,5,6,6,5,4,1,3,5,3,2,5,1,3,1,6 | -19,6 |
Информационное сообщение. В качестве способа модуляции гидроакустического сигнала была выбрана частотная модуляция.
Повышение требований к скорости и достоверности передачи информации приводят к необходимости принятия специальных мер, направленных на уменьшение вероятности возникновения ошибок в процессе передачи. Одним из возможных решений указанной задачи служит канальное кодирование.
На основании вышеизложенного рассмотрим несколько вариантов частотно-модулированного сигнала с количеством частот ![]()
![]() и
и ![]() . В классе линейных кодов особое место занимают циклические коды, содержащие все циклические сдвиги всех своих кодовых слов. В настоящее время известно лишь несколько продуктивных методов конструирования порождающих полиномов циклических кодов с предсказуемой исправляющей способностью и приемлемой скоростью. Одними из них являются коды Боуза–Чоудхури–Хоквингема (БЧХ) [2].
. В классе линейных кодов особое место занимают циклические коды, содержащие все циклические сдвиги всех своих кодовых слов. В настоящее время известно лишь несколько продуктивных методов конструирования порождающих полиномов циклических кодов с предсказуемой исправляющей способностью и приемлемой скоростью. Одними из них являются коды Боуза–Чоудхури–Хоквингема (БЧХ) [2].
Среди троичных кодов рассмотрим код Голея (11,6).
Перейдем к рассмотрению случая ![]() и вновь проанализируем коды БЧХ. Несмотря на то, что подобные коды редко находят свое применение в современных телекоммуникационных системах, четверичные коды БЧХ могут обеспечить небольшой выигрыш по сравнению с некодированной передачей.
и вновь проанализируем коды БЧХ. Несмотря на то, что подобные коды редко находят свое применение в современных телекоммуникационных системах, четверичные коды БЧХ могут обеспечить небольшой выигрыш по сравнению с некодированной передачей.
Существует большой и эффективный класс древовидных или решетчатых кодов, среди которых особый интерес представляют сверточные коды [2], которые также примем в рассмотрение.
Итоги проведенного анализа подводит табл. 2, содержащая параметры кодов, подходящих для построения проектируемого гидроакустического канала связи. Так, простое сверточное кодирование способно обеспечить работу гидроакустической системы при ![]() дБ с вероятностью ошибки на бит
дБ с вероятностью ошибки на бит  при скорости передачи данных
при скорости передачи данных ![]() 1 кбит/c. Например, код NASA (171,133) обеспечивает названную надежность передачи уже при
1 кбит/c. Например, код NASA (171,133) обеспечивает названную надежность передачи уже при ![]() дБ (опция 1 таблицы 2). При желании снизить необходимое отношение сигнал-шум можно увеличить длину кодового ограничения до 9 или уменьшить скорость кода до 1/3 (опции 2 и 3). Если требование по энергетике не столь жесткие, то можно прибегнуть к блоковым кодам - кодам БЧХ и Голея (опции 4-6).
дБ (опция 1 таблицы 2). При желании снизить необходимое отношение сигнал-шум можно увеличить длину кодового ограничения до 9 или уменьшить скорость кода до 1/3 (опции 2 и 3). Если требование по энергетике не столь жесткие, то можно прибегнуть к блоковым кодам - кодам БЧХ и Голея (опции 4-6).
Таблица 2
Варианты выбора кода и значения ![]() , дБ, при
, дБ, при ![]() ,
, ![]() кбит/с
кбит/с
№ | Опция |
|
|
1 | двоичный сверточный код (171,133) | 1/2 | 2,2 |
2 | двоичный сверточный код (753,561) | 1/2 | 1,6 |
3 | двоичный сверточный код (711,663,557) | 1/3 | 1,2 |
4 | двоичный код БЧХ (127,64) | 1/2 | 6 |
5 | троичный код Голея (11,6) | 6/11 | 6,2 |
6 | четверичный код БЧХ (63,45) | 5/7 | 6,7 |
В заключение приведем варианты возможной структуры гидроакустического сигнала. Пусть для рассматриваемого канала доступна полоса ![]() кГц. Зададимся вероятностью ложной тревоги и пропуска сигнала
кГц. Зададимся вероятностью ложной тревоги и пропуска сигнала  ,
,  и временем когерентности канала
и временем когерентности канала ![]() мс, а значит
мс, а значит ![]() мс. Также будем ориентироваться на самый неблагоприятный случай, а именно пусть отношение сигнал-шум в полосе сигнала близко к
мс. Также будем ориентироваться на самый неблагоприятный случай, а именно пусть отношение сигнал-шум в полосе сигнала близко к ![]() дБ. Была найдена подходящая решетка для преамбулы сигнала - решетка
дБ. Была найдена подходящая решетка для преамбулы сигнала - решетка ![]() с
с ![]() и
и ![]() вида [1,2,2,1,3,4,3,5,6,4,2,3]. Далее из таблицы 2 необходимо выбрать код с хорошей исправляющей способностью в заданных условиях - это, к примеру, двоичный сверточный код (753,561) скорости
вида [1,2,2,1,3,4,3,5,6,4,2,3]. Далее из таблицы 2 необходимо выбрать код с хорошей исправляющей способностью в заданных условиях - это, к примеру, двоичный сверточный код (753,561) скорости ![]() . Следовательно, в качестве способа модуляции следует выбрать двоичную ЧМ. Описанная структура гидроакустического сигнала приведена на рис. 2.
. Следовательно, в качестве способа модуляции следует выбрать двоичную ЧМ. Описанная структура гидроакустического сигнала приведена на рис. 2.
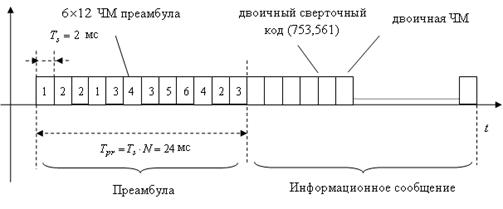
Рис. 2 - Вариант структуры гидроакустического сигнала при ![]() кГц
кГц
Заключение
На основании исследования можно сделать следующие выводы:
§ так как замирания в канале являются быстрыми, то необходимо применять некогерентные сигналы;
§ структуру сигнала следует выбрать состоящей из преамбулы с хорошими автокорреляционными свойствами и информационного сообщения, кодированного подходящим канальным кодом;
§ в качестве преамбулы сигнала для случая ширины полосы ![]() кГц целесообразно использовать ЧМ сигналы размера
кГц целесообразно использовать ЧМ сигналы размера ![]() , где
, где ![]() , так как влияние эффекта доплера на передаваемый сигнал отсутствует. При этом для полосы
, так как влияние эффекта доплера на передаваемый сигнал отсутствует. При этом для полосы ![]() кГц также при отсутствии влияния доплера была выбрана решетка размером
кГц также при отсутствии влияния доплера была выбрана решетка размером ![]() , поскольку по расчетам имеется большой запас в количестве требуемых частот и длина последовательности чрезвычайно мала;
, поскольку по расчетам имеется большой запас в количестве требуемых частот и длина последовательности чрезвычайно мала;
§ в зависимости от состояния гидроакустического канала (отношения сигнал-шум в полосе сигнала) в качестве помехоустойчивых кодов можно применять как блоковые, так и сверточные коды;
§ найденные варианты канального кодирования обеспечивают работу системы при отношении сигнал-шум в полосе менее 2 дБ.
Дальнейшие исследования будут направлены на проверку теоретических исследований путем компьютерного моделирования.
ЛИТЕРАТУРА
1. Широкополосные системы и кодовое разделение сигналов. Принципы и приложения. Пер. с англ. М.: Техносфера, 2007.
2. Кларк Дж мл., Кейн Дж. Кодирование с исправлением ошибок в системах цифровой связи. Пер. с англ. М.: Радио и связь, 1987.
3. Oscar Moreno, Solomon Golomb, and Herbert Taylor. Two-dimensional synchronization patterns for minimum ambiguity. IEEE Transactions on Information Theory, 28:600–664, 1982.
4. Hamkins, J. and Zeger, K. Improved bounds on maximum size binary radar array, IEEE Trans. Inform. Theory, 43, pp. 997–1000, 1997.
Текст доклада согласован с научным руководителем.
, д. т.н., профессор (ОАО “Российский институт радионавигации и времени”, С.-Петербург).
[1] Научный руководитель доктор технических наук, профессор,
