
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 531.08 + 621.01
Алюшин ЮА
ДИНАМИЧЕСКИЙ АНАЛИЗ КРИВОШИПНО-ПОЛЗУННОГО МЕХАНИЗМА С ИСПОЛЬЗОВАНИЕМ ЦЕНТРОБЕЖНЫХ СИЛ
Из энергетической модели механики твердого тела [1] следует, что для расчета скорости изменения (мощности) кинетической энергии можно использовать различные кинематические (координаты, скорости и ускорения) и геометрические (радиусы инерции ![]() ) параметры, зависящие от выбора полюса Р, определяющего ось вращения тела [2-3]. Ниже рассмотрены два варианта расчета кинетической энергии и скорости её изменения с использованием ньютоновых (полюс совмещен с центром масс) и центробежных (полюс совмещен с мгновенным центром скоростей) сил для шатуна кривошипно-ползунного механизма, когда ось поступательного перемещения ползуна проходит через ось вращения кривошипа (рис. 1).
) параметры, зависящие от выбора полюса Р, определяющего ось вращения тела [2-3]. Ниже рассмотрены два варианта расчета кинетической энергии и скорости её изменения с использованием ньютоновых (полюс совмещен с центром масс) и центробежных (полюс совмещен с мгновенным центром скоростей) сил для шатуна кривошипно-ползунного механизма, когда ось поступательного перемещения ползуна проходит через ось вращения кривошипа (рис. 1).
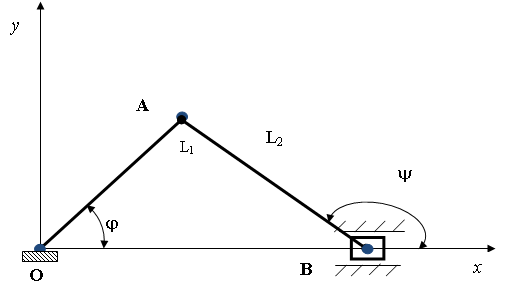 |
Рис. 1 Кинематическая схема кривошипно-ползунного механизма
Любое плоскопараллельное движение абсолютно твердого тела можно рассматривать как поступательное движение с перемещениями, скоростями и ускорениями некоторого, связанного с этим телом, полюса Р(хР, уР) и вращение тела относительно оси, проходящей через этот полюс Р, ортогонально плоскости движения тела [1-2] в соответствии с уравнениями
 , (1)
, (1)
 ,
,
где ![]() – угол поворота тела за рассматриваемый промежуток времени,
– угол поворота тела за рассматриваемый промежуток времени, ![]() – начальные (лагранжевы) координаты полюса Р и частицы, соответственно.
– начальные (лагранжевы) координаты полюса Р и частицы, соответственно.
Дифференцирование соотношений (1) по времени позволяет определить компоненты скорости и ускорения произвольной частицы через компоненты скорости и ускорения полюса и угловые характеристики вращения тела
 ,
,
 , (2)
, (2)
 ,
,
 .
.
В рассматриваемом механизме кривошип ОА вращается вокруг неподвижной оси О(0, 0), совмещенной с началом координат, с угловой скоростью ![]() и ускорением
и ускорением ![]() . В любой момент времени координаты, скорости и ускорения точки А определяют уравнения (1) – (2), которые при совмещении полюса с неподвижным началом координат принимают вид
. В любой момент времени координаты, скорости и ускорения точки А определяют уравнения (1) – (2), которые при совмещении полюса с неподвижным началом координат принимают вид
 ,
, ![]() ,
,
![]() ,
, ![]()
Кинематические характеристики оси шарнира А, соединяющей кривошип и шатун, могут быть использованы для последующего расчета координат, скоростей и ускорений любых частиц шатуна в соответствии с уравнениями (1) – (2)
 ,
,
 ,
,
 ,
, ![]() .
.
Аналогичные уравнения справедливы и для центра масс шатуна С
![]() , (3)
, (3)
 ,
,
 ,
, ![]() .
.
Необходимые для расчета угловые характеристики вращения шатуна ![]() ,
, ![]() и
и ![]() находим из кинематических связей
находим из кинематических связей
 ,
, ![]() ,
,
 ,
,
 .
.
Эти результаты позволяют определить положение МЦС в системе координат наблюдателя
 ,
, ![]() . (4)
. (4)
С учетом
 ,
, ![]()
соотношения (4) можно записать в виде
 ,
,  , (5)
, (5)
или
 ,
, ![]() . (6)
. (6)
Из последних соотношений следует
 ,
, ![]() ,
,  , (7)
, (7)
что легко проверить графическим построением МЦС для рассматриваемой схемы механизма.
Введем дополнительную (правую декартову) систему координат с началом в МЦС, новые координаты центра масс шатуна С получим с помощью соотношений
 ,
, ![]() .
.
Производные по времени от штрихованных координат однозначно определяются производными от координат МЦС и центра масс
 , (8)
, (8)
 .
.
Дифференцируя уравнения (5), получаем
 . (9)
. (9)
С учетом (7) находим для второй компоненты
 . (10)
. (10)
Таким образом, вместо (8) получаем
 , (11)
, (11)
 .
.
Расчет кинетической энергии для шатуна при различных положениях кривошипа приведен в файле [4] по двум вариантам: при совмещении полюса с центром масс
 (12)
(12)
и с мгновенным центром скоростей
![]() , (13)
, (13)
где

или
 .
.
Расчеты были проведены как через радиус ![]() , так и через координаты
, так и через координаты  , принимая во внимание соотношения
, принимая во внимание соотношения
![]() ,
, ![]() .
.
Сравнение результатов (строка 89) показывает их полное совпадение при любых угловых скоростях и ускорениях кривошипа, а также инерционных характеристиках (значениях масс и моментов инерции) всех звеньев механизма, но только для суммарных значений. Слагаемые кинетической энергии (12) во втором варианте отсутствуют. Инвариантом является только полная кинетическая энергия, а не её составляющие, ассоциируемые с поступательным и вращательным движениями звеньев.
Обобщенные силы определяют скорость изменения кинетической энергии. Если полюс совмещен с центром масс, тогда
![]() ,
,
где множители угловых и линейных скоростей по определению являются обобщенными (ньютоновыми) силами и моментом (в нижнем индексе момента дополнительно указано положение полюса)
![]() ,
,  ,
, ![]() .
.
В случае совмещения полюса с МЦС, когда вместо (13) можно записать
 ,
,
для приращения кинетической энергии шатуна получаем

или
 .
.
Правую часть полученного уравнения можно записать через координаты центра масс в новой системе

и выразить обобщенные силы либо через радиус
 ,
, ![]() ,
,  ,
,
либо через координаты
 .
.
Из сравнения результатов следует, что, как и для кинетической энергии, доли мощности (скорости изменения) кинетической энергии, ассоциируемые с поступательным и вращательным движением тела, не являются инвариантами, зависят от выбора полюса. Вместе с тем, скорость изменения кинетической энергии при любом выборе полюса остается одинаковой.
Технологические силы на ползуне при последующем расчете обобщенных сил на осях шарниров (строки 160 – 230) приняты постоянными при его движении в положительном направлении оси х и равными 0 при движении в обратном направлении, как при работе механизма в качестве привода конвейера.
Приведенный пример показывает определенные сложности и неудобства расчета скорости изменения или абсолютных значений кинетической энергии через центробежные силы для шатунов шарнирно-рычажных механизмов, так как в каждый момент времени надо искать положение МЦС и скорости изменения его координат.
Вместе с тем, из приведенного примера видно, что как ньютоновы, так и центробежные силы определяют возможные эквивалентные по результатам варианты расчета скорости изменения кинетической энергии на скоростях изменения согласованных с ними кинематических координат.
Центробежные силы (и их проекции) имеют такую же природу, как и ньютоновы силы инерции, характеризуют скорость изменения кинетической энергии на скорости изменения расстояния между центром масс тела и мгновенным центром скоростей. При неподвижной оси вращения центробежные силы они переходят в разряд потенциальных и могут производить мощность при изменении кинематических связей, также как силы в неподвижных осях шарниров и в направляющих ползунов шарнирно-рычажных механизмов (см. строку 236).
ЛИТЕРАТУРА
1. Энергетические основы механики. М.: Машиностроение, 19с.
2. Механика твердого тела в переменных Лагранжа. М.: Машиностроение, 20с.
3. Алюшин интерпретация центробежных и иных сил. Известия РАН. Механика твердого тела (в редакции журнала с 14.11.2014г)
4. Файл “Динамический анализ КПМ. xlsx” URL: http://www. Сайт «allmechanics. narod. ru».
