


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 62-551.3
Разработка автоматической системы позиционного регулирования микроклимата чистых помещений на базе микропроцессора SMART
, ,
Россия, г. Тамбов, ТамбовГТУ
Рассматривается система позиционного регулирования микроклимата чистых помещений. Система построена на базе ПЛК SMART I/O с использованием программного пакета ISaGRAF_3.32.
Let’s consider a system of positional regulation microclimate in the net room. The system is based on PLC SMART I/O with using ISaGRAF_3.32 software.
Автоматизация процессов производства во многом определяет его эффективность и рентабельность. Дальнейшее развитие отраслей промышленности требует создания автоматизированного оборудования. Решение этой задачи возможно на основе широкого применения микропроцессорной и микроконтроллерной техники, электронных вычислительных машин, благодаря чему оборудование совместимо с новейшим программным и техническим обеспечением и имеет возможность дальнейшей модернизации.
Распространённость систем двухпозиционного регулирования связана с простотой их реализации, невысокой стоимостью, надёжностью в эксплуатации и лёгкостью в управлении [1].
Двухпозиционно-статическое регулирование применяется в системах, где объект управления обладает значительным запаздыванием, и, как следствие, амплитуда колебаний регулируемой величины становится недопустимо большой [2]. Сущность двухпозиционно-статического регулирования заключается во введении в систему корректирующего устройства в виде звена экспоненциальной обратной связи, что позволяет снизить амплитуду колебаний и повысить качество регулирования (рис. 1):
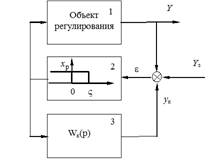
Рис.1 Схема двухпозиционно-статического регулирования с обратной связью
Объект регулирования (1) описывается уравнением:  , где
, где ![]() – приток тепла, Дж/сек;
– приток тепла, Дж/сек; ![]() – отток тепла, Дж/сек; t - время, сек; t – температура, оС; m – масса объекта, кг; С – тепловая емкость среды в объекте, Дж/оС (С=сm, где с и m – удельная теплоемкость и масса объекта).
– отток тепла, Дж/сек; t - время, сек; t – температура, оС; m – масса объекта, кг; С – тепловая емкость среды в объекте, Дж/оС (С=сm, где с и m – удельная теплоемкость и масса объекта).
Работа релейного элемента (2) описывается выражением:
 где
где ![]() ,
, ![]() – значение выходного сигнала
– значение выходного сигнала ![]() релейного элемента, соответственно, при включенном и выключенном его состоянии;
релейного элемента, соответственно, при включенном и выключенном его состоянии;  – зона возврата.
– зона возврата.
Корректирующее устройство 3 определяется следующей функцией:
 где
где ![]() ,
, ![]() – коэффициент усиления и постоянная времени корректирующего устройства [3].
– коэффициент усиления и постоянная времени корректирующего устройства [3].
Двухпозиционный статический закон регулирования обладает существенными преимуществами перед обычным двухпозиционным регулирование и легко реализуется на современных микроконтроллерах [4].
В состав системы регулирования входят:
- блок контроллера;
- блок объекта управления;
- компьютер.
Блок контроллера работает на базе ПЛК SMART-I/O (платы SM-ADC1 6-аналоговых входов, SM-DOUT1 8-дискретных выходов, интерфейс RS-232). В качестве программного обеспечения для создания и отладки программных модулей, а также загрузки их в контроллер используется инструментальная среда разработки ISAGraf_3.32. Управляющие воздействия, сформированные блоком контроллера, передаются на объект управления.
В состав блока контроллера входят металлический каркас, выполненный из нержавеющей стали, с установленными на нем DIN-рейками, микроконтроллер SMART-I/O, блоки питания, выключатель (рис.2а).
Работа блока контроллера заключается в выработке управляющих воздействий и передаче их на блок объекта управления.
Блок объекта управления состоит из металлического каркаса, с установленной на нем DIN-рейкой, объекта управления, шести реле типа Phoenix Contact, датчика температуры типа ТСПУ-205, блока питания вентиляторов.
Объект управления (рис.2б) представляет собой металлический короб, выполненный из нержавеющей стали. Внутри короба в его нижней части установлены три нагревателя (электролампы по 100 Вт). По сторонам объекта установлено три вентилятора. В верхней части короба находится термометр сопротивления.
Работа блока объекта управления состоит в определении и передаче температуры объекта на блок контроллера, а также изменении режима работы объекта посредством включения/выключения нагревателей для поддержания температуры объекта в заданном режиме.
Схема системы регулирования представлена на рис. 2в:

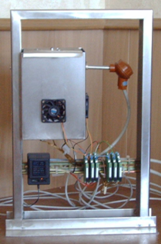
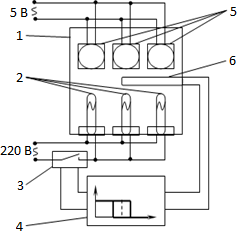
а) б) в)
Рис.2 а – блок контроллера, б – блок объекта управления, в – схема регулирования
Вентиляторы 5 постоянно включены, что обеспечивается перемешивание потоков воздуха в объекте 1. Измерение температуры производится с помощью термометра сопротивления 6. Результат измерения поступает на аналоговый вход контроллера 4. Контроллер включает или выключает реле 3 в соответствии с загруженной в него программой, при этом происходит включение или выключение электроламп 2.
Комплекс позволяет реализовать классические схемы двухпопозиционного регулирования. Программу управления объектом можно разработать в среде IsaGRAF 3.32.
На рис.3 приведен результат исследований – процесс регулирования с корректирующим устройством. На верхнем графике ось абсцисс совмещена с линией заданного значения температуры. На нижнем графике показано изменение притока Qпр во времени при постоянном оттоке тепла Qот:
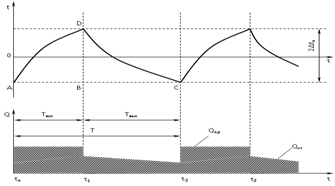
Рис.3 График двухпозиционного регулирования, где 2Δtз – зона нечувствительности, τ – время, t – темпреатура
Автоматический комплекс позиционного регулирования может использоваться для поддержания температуры и других параметров в чистых помещениях, например в операционных и реанимационных отделениях. Также позиционные регуляторы применяются для регулирования температуры электрических печей сопротивления и других установок с электрообогревом. Особо перспективным выглядит использование комплекса в детских инкубаторах для новорождённых.
Литература
1. , , Лагутин моделирование в среде PSI/C. Тамбов.:ТГТУ, 1997. –20с.
2. , Елизаров . Технологическое программирование микроконтроллеров. –Тамбов.:ТГТУ, 1996. –57 с.
3. Г, , Елизаров технологических процессов отрасли. –Тамбов.:ТГТУ, 1995. –44 с.
4. Клюев автоматические регуляторы и их настройка. М.: Энергия, 19с.
Сергей Владимирович Фролов, д. т.н., профессор, ТамбовГТУ, каф. Биомедицинская техника
– к. т.н., доцент, ТамбовГТУ, каф. Биомедицинская техника
– бакалавр. ТамбовГТУ, каф. Биомедицинская техника, Телефон: , e-mail: korobov91@
