
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
2. исследование механических характеристик машины
постоянного тока независимого возбуждения
в двигательном и генераторном режиме и
противовключении
Ц е л ь р а б о т ы: исследовать работу машины постоянного тока с независимым возбуждением в двигательном и генераторном режиме и противовключении, построить соответствующие механические характеристики [].
2.1. Краткие теоретические сведения
Электрическая машина любого типа (как постоянного так и переменного тока), используемая в системах электропривода, может работать в двигательном и тормозных режимах.
Для отражения свойств приводной электрической машины применяют следующие характеристики:
- электромеханическую, представляющей собой зависимость угловой скорости w или частоты вращения n двигателя от тока, протекающего по обмотке якоря: w = f (Iа) или n = f (Iа);
- механическую, представляющей собой зависимость угловой скорости w или частоты вращения n двигателя от электромагнитного момента М: w = f (М) или n = f (М).
Принятая единица измерения угловой скорости w – рад/с, а частоты вращения n – об/мин.
Известно уравнение, составленное по второму закону Кирхгофа для цепи якоря двигателя постоянного тока в установившемся режиме его работы [],
Uа = Eа + RаIа = kФw + (rа + Rр)Iа , (2.1)
где Ua – напряжение, подключенное к обмотке якоря;
Ea – электродвижущая сила (ЭДС), наводимая основным магнитным потоком в обмотке якоря;
Ia – ток, протекающий в обмотке якоря (в генераторном режиме направление тока якоря меняется на противоположное);
k – коэффициент, обусловленный конструктивными параметрами машины;
Ф – основной магнитный поток;
Ra – суммарное сопротивление в цепи обмотки якоря, равное Ra = rа + Rр ;
rа – сопротивление обмоток машины, включенных последовательно в цепь якоря, графитовых щеток, переходного скользящего контакта и соединений, выполненных в цепи якоря непосредственно в самой электрической машине;
Rр – сопротивление реостатов, подключенных последовательно к обмотке якоря.
Выразив из (2.1) угловую скорость, получим скоростную, или электромеханическую, характеристику:
 . (2.2)
. (2.2)
Известна зависимость для определения электромагнитного момента МПТ [],
М = kФIа . (2.3)
Выразив из (2.3) ток якоря и подставив его в выражение (2.2), получим:
 . (2.4)
. (2.4)
Как видно из выражения (2.4) , если не учитывать размагничивающее действие реакции якоря, механическая характеристика машины постоянного тока с независимым возбуждением при неизменных значениях Uа, Ф и Rа представляет собой прямую линию (рис. 2.1).
, если не учитывать размагничивающее действие реакции якоря, механическая характеристика машины постоянного тока с независимым возбуждением при неизменных значениях Uа, Ф и Rа представляет собой прямую линию (рис. 2.1).
При моменте, равном нулю (М = 0), все характеристики, соответствующие различным значениям Rр, проходят через одну точку, лежащую на оси ординат. Угловая скорость в этой точке имеет значение (w0 = Uа / kФ), не зависящее от значения сопротивления цепи якоря. Режим работы машины с такой скоростью вращения ротора называется идеальным холостым ходом. В таком режиме работы ток в цепи якоря отсутствует (Iа = 0), ЭДС обмотки якоря равна напряжению (Еа = Uа). Такой режим может возникнуть при движении привода под действием внешней силы, например, силы тяжести, которая скомпенсировала силу трения, противодействующую движению.
Второе слагаемое уравнения (2.4) характеризует изменение угловой скорости  , т. е. наклон (жесткость) механической характеристики.
, т. е. наклон (жесткость) механической характеристики.
Естественная характеристика двигателя получается при Rр = 0 (т. е. Rа = rа), номинальных значениях напряжения Uа и магнитного потока Ф. Механические характеристики, получаемые при включении в цепь обмотки якоря реостата (Rp > 0), называются искусственными, или реостатными.
Двигательный режим характеризуется тем, что машина преобразует электрическую энергию, потребляемую от источника, в механическую и передает ее рабочему механизму.
При этом момент и частота вращения ротора направлены в одну сторону:
- I квадрант (w > 0, М > 0) – вращение ротора происходит в сторону, совпадающую той, что выбрана за положительное направление вращения (см. рис. 2.1);
- III квадрант (w < 0, М < 0) – вращение ротора происходит в противоположную сторону (характеристики можно получить из показанных на рис. 2.1, произведя их симметричный перенос относительно начала координат).
Следует иметь в виду, что в любом режиме работы электрическая машина преобразует определенную часть энергии в тепло. Эту энергию называют потери.
Режим короткого замыкания характеризуется тем, что частота вращения ротора равна нулю, но машина, как и в двигательном режиме, подключена к сети и потребляет электрическую энергию, однако преобразует ее только в тепловую.
Такой режим соответствует точке пересечения механической характеристики с осью абсцисс.
В режиме короткого замыкания машина находится каждый раз при пуске в тот момент, когда ее подключают к сети. Также машина может перейти в данный режим, например, из двигательного в случае, когда момент внешних сил выше электромагнитного момента двигателя.
Тормозные режимы характеризуются тем, что момент и частота вращения направлены в противоположные стороны (т. е. встречно). При этом характеристики располагаются в II и IV квадрантах.
Преимущество применения тормозных режимов электропривода по сравнению с механическими системами торможения – отсутствие механического износа тормозных колодок.
Генераторный режим (генераторное или рекуперативное торможение) характеризуется тем, что машина преобразует механическую энергию, получаемую от рабочего механизма, в электрическую и отдает ее в сеть.
Для обеспечения этого способа торможения необходимо, чтобы скорость вращения ротора превышала скорость вращения идеального холостого хода (w > w0). В этом случае ЭДС, наводимая в обмотке якоря, превышает напряжение, приложенное к ней (Еа > Uа), следовательно, машина становится источником, а сеть – приемником электроэнергии (направление тока якоря изменяется на противоположное).
Такой способ торможения применяется в приводах подъемных механизмов при спуске груза, или на тяге при движении с горки.
Генераторное торможение наиболее экономично, поскольку оно сопровождается отдачей электроэнергии в сеть.
Торможение противовключением (режим электромагнитного тормоза) характеризуется тем, что машина потребляет из сети электрическую энергию, расходуемую на торможение ротора, движущегося под действием внешнего момента или сил инерции. Вся потребляемая энергия преобразуется в тепловую.
Такой способ позволяет осуществить быстрое торможение рабочего механизма. На практике данный режим осуществляется путем смены полярности напряжения, приложенного к обмотке якоря. Также такой режим, как аварийный, может возникнуть в электроприводе грузоподъемных механизмов, когда двигатель включен на подъем, а тяжесть груза заставляет вращаться привод в обратном направлении.
Ток якоря при торможении противовключением значительно превышает номинальное значение. Для его ограничения в цепь якоря вводится добавочное сопротивление Rр.
2.2. Методические рекомендации к проведению исследования
Для выполнения экспериментального исследования необходимо:
1) Изучить электрическую схему лабораторного стенда (рис. 2.2).
Записать паспортные данные машины постоянного тока: номинальные частоту вращения якоря nн, ток обмотки якоря Iан, мощность Pн.
2) Собрать на лабораторном стенде схему для исследования (рис. 2.2).
3) Привести переключатели схемы в исходное положение:
а) на модулях «Модуль питания стенда» и «Модуль питания» автоматы отключить;
б) на модуле «Модуль добавочных сопротивлений» переключатель перевести в положение «0» (против часовой стрелки до упора);
в) на модуле «Тиристорный преобразователь» кнопку «Сеть» отключить, переключатель SA1 перевести в положение «Iя», SA2 – «Скорость», SA3 – «Руч», SA4 – «НМ», SA5 перевести в среднее положение «Стоп», SA6 «Разрешение» перевести в нижнее положение, движок потенциометра RP1 выкрутить против часовой стрелки до упора – в положение «0»;
г) на модуле «Преобразователь частоты» переключатель SA1 «Разрешение» перевести в нижнее положение, SA2 перевести в среднее положение, SA3 – в положение «Скорость», движок потенциометра RP1 выкрутить против часовой стрелки до упора – в положение «0».

Рис. 2.2. Схема испытания двигателя постоянного тока с независимым
возбуждением в двигательном и генераторном режиме и противовключении
4) Перед включением необходимо, чтобы схема испытания была проверена преподавателем.
5) Последовательность действий при выполнении эксперимента:
а) автоматы на модулях «Модуль питания стенда» и «Модуль питания» включить, на модуле «Тиристорный преобразователь» кнопку «Сеть» включить, переключатель SA5 перевести в верхнее положение «Вперед», SA6 «Разрешение» перевести в верхнее положение, на модуле «Преобразователь частоты» переключатель SA1 «Разрешение» перевести в верхнее положение, переключатель SA2 перевести в верхнее положение «Вперед»;
б) на модуле «Тиристорный преобразователь» вращая по часовой стрелке движок потенциометра RP1, проверить направление вращения ротора испытуемой МПТ в двигательном режиме и вновь остановить ротор, вернув движок потенциометра RP1 в исходное положение;
в) на модуле «Преобразователь частоты» движок потенциометра RP1 вращая по часовой стрелке, проверить направление вращения ротора асинхронной машины в двигательном режиме и вновь остановить ротор, вернув движок потенциометра RP1 в исходное положение;
г) в случае если направление вращения ротора асинхронной машины в двигательном режиме не совпало с направлением вращения ротора испытуемой МПТ в двигательном режиме, необходимо изменить порядок чередования фаз, подключенных к обмотке статора асинхронной машины;
д) на модуле «Преобразователь частоты» вращая по часовой стрелке движок потенциометра RP1, довести частоту вращения ротора асинхронной машины до значения n0 = 1000 об/мин (показания контролировать на модуле «Силовой модуль» по датчику скорости) и на модуле «Преобразователь частоты» переключатель SA1 «Разрешение» перевести в нижнее положение (вращение ротора остановится);
е) на модуле «Тиристорный преобразователь» вращая по часовой стрелке движок потенциометра RP1, довести частоту вращения ротора испытуемой МПТ до значения n0, на модуле «Преобразователь частоты» переключатель SA1 «Разрешение» перевести в верхнее положение (обе машины подключены к сети и совместно вращаются в двигательном режиме, не нагружая одна другую);
ж) обратить внимание в следующих пунктах при снятии механических характеристик: ток якоря Ia испытуемой МПТ не должен превышать ±1 А;
з) для снятия механической характеристики в режиме генераторного торможения, идеального холостого хода, двигательного режима и короткого замыкания, регулируя скорость вращения ротора МПТ с помощью асинхронной машины (на модуле «Преобразователь частоты» вращать движок потенциометра RP1), записать показания тока якоря Ia и частоты вращения n в таблицу 2.1 (рекомендуется зафиксировать по одной точке в каждом режиме);
и) для снятия механической характеристики в режиме торможения противовключением:
- на модуле «Преобразователь частоты» выкрутить движок потенциометра RP1 против часовой стрелки до упора в положение «0» (переведя машину в режим короткого замыкания – ротор заторможен),
- на модуле «Преобразователь частоты» переключатель SA2 перевести в нижнее положение «Назад»,
- на модуле «Преобразователь частоты» вращая движок потенциометра RP1 по часовой стрелке, записать показания тока якоря Ia и частоты вращения n в таблицу 2.1;
к) снять реостатные механические характеристики, повторив два предыдущих пункта при введенном добавочном сопротивлении в цепь якоря МПТ (значение величины сопротивления задается преподавателем на модуле «Модуль добавочных сопротивлений»);
л) по завершении снятия показаний:
- привести схему к режиму работы двигателей без нагрузки (частота вращения вновь станет равной n0 = 1000 об/мин);
- на модуле «Преобразователь частоты» переключатель SA1 «Разрешение» перевести в нижнее положение;
- на модуле «Тиристорный преобразователь» движок потенциометра RP1 выкрутить против часовой стрелки до упора, уменьшив частоту вращения ротора испытуемой МПТ до нуля;
- привести переключатели на стенде в исходное положение см. п.3.
Т а б л и ц а 2.1
Результаты измерения и расчета механических характеристик МПТ
n, об/мин | Ia, A | M, Н·м |
2.3. Расчеты и построения
1) Рассчитать электромагнитный момент, создаваемый испытуемой машиной постоянного тока по следующему выражению, полученному из (2.3) для случая МПТ с независимым возбуждением без учета реакции якоря:
М = СIа . (2.5)
Постоянный коэффициент С = kФ может быть найден из паспортных данных машины:
 , (2.6)
, (2.6)
где Iан – номинальное значение тока якоря двигателя, А;
Рн – номинальная мощность на валу двигателя, Вт;
nн – номинальная частота вращения двигателя, об/мин.
2) Построить снятые механические характеристики двигателя n = f (M).
2.4. Контрольные вопросы
1) В чем отличие двигательного от всех тормозных режимов работы?
2) Как осуществляется переход в режим рекуперативного торможения?
3) В чем суть режима рекуперативного торможения и каковы его преимущества?
4) Как осуществляется переход в режим электромагнитного торможения?
5) В чем суть режима электромагнитного торможения и каковы его преимущества?
3. исследование механических характеристик машины
постоянного тока независимого возбуждения
в режиме динамического (реостатного) торможения
Ц е л ь р а б о т ы: исследовать работу двигателя постоянного тока с независимым возбуждением в режиме динамического торможения, построить соответствующие механические характеристики [].
3.1. Краткие теоретические сведения
Для осуществления режима динамического торможения МПТ необходимо ее обмотку возбуждения подключить к источнику постоянного тока, а обмотку якоря подключить к нагрузочным сопротивлениям Rн для работы на реостатной характеристике или замкнуть накоротко – на естественной.
Работа МПТ в данном режиме соответствует работе в генераторном режиме, но при этом электрическая цепь, подключенная к обмотке якоря не имеет источников, т. е. Ua = 0.
Уравнение, составленное по второму закону Кирхгофа для цепи якоря машины постоянного тока в установившемся режиме динамического торможения имеет вид:
0 = Eа + RаIа = kФw + (rа + Rр)Iа . (3.1)
Режим динамического торможения характеризуется тем, что механическая энергия вращения преобразуется в электрическую энергию, которая впоследствии преобразуется в цепи якоря в тепловую энергию реостатами или самой обмоткой якоря, если она замкнута накоротко.
Преобразуя выражение (3.1), получим выражение для определения угловой скорости, которое будет отличаться от (2.4) и иметь вид:
 , (3.2)
, (3.2)
из которого видно, что механические характеристики МПТ, в режиме динамического торможения выходят из начала координат (рис. 3.1).
Такой способ торможения МПТ применим практически в любых устройствах.
 Преимущества данного способа: малая стоимость тормозных реостатов по сравнению с устройствами необходимыми для других способов торможения, возможность торможения при малых скоростях движения (практически до остановки).
Преимущества данного способа: малая стоимость тормозных реостатов по сравнению с устройствами необходимыми для других способов торможения, возможность торможения при малых скоростях движения (практически до остановки).
Недостатки данного способа: с уменьшением скорости до нуля момент также уменьшается до нуля, электрическая энергия не возвращается обратно в сеть.
3.2. Методические рекомендации к проведению исследования
Для выполнения экспериментального исследования необходимо:
1) Изучить электрическую схему лабораторного стенда (рис. 3.2).
Записать паспортные данные машины постоянного тока: номинальные частоту вращения якоря nн, ток обмотки якоря Iан, мощность Pн.
2) Собрать на лабораторном стенде схему для исследования (рис. 3.2).
3) Привести переключатели схемы в исходное положение:
а) автоматы на модулях «Модуль питания стенда» и «Модуль питания» отключить;
б) переключатель на модуле «Модуль добавочных сопротивлений» перевести в положение «0» (против часовой стрелки до упора);
в) на модуле «Преобразователь частоты» переключатель SA1 «Разрешение» перевести в нижнее положение, SA2 перевести в среднее положение, SA3 – в положение «Скорость», движок потенциометра RP1 выкрутить против часовой стрелки до упора – в положение «0».

Рис. 3.2. Схема испытания двигателя постоянного тока
с независимым возбуждением в режиме динамического торможения
4) Перед включением необходимо, чтобы схема испытания была проверена преподавателем.
5) Последовательность действий при выполнении эксперимента:
а) автоматы на модулях «Модуль питания стенда» и «Модуль питания» включить, на модуле «Преобразователь частоты» переключатель SA1 переключить в верхнее положение, SA2 – в положение «Вперед»;
б) обратить внимание в следующих пунктах при снятии механических характеристик: ток якоря Ia испытуемой МПТ не должен превышать ±1 А;
в) для снятия механической характеристики в режиме динамического торможения, регулируя скорость вращения ротора МПТ с помощью асинхронной машины (на модуле «Преобразователь частоты» вращать движок потенциометра RP1), записать показания тока якоря Ia и частоты вращения n в таблицу 3.1 (рекомендуется зафиксировать не менее трёх точек на характеристике);
г) снять реостатные механические характеристики, повторив предыдущий пункт при введенном добавочном сопротивлении в цепь якоря МПТ (значение величины сопротивления задается преподавателем на модуле «Модуль добавочных сопротивлений»);
д) по завершении снятия показаний:
- на модуле «Преобразователь частоты» движок потенциометра RP1 выкрутить против часовой стрелки до упора, уменьшив частоту вращения ротора испытуемой МПТ до нуля;
- на модуле «Преобразователь частоты» переключатель SA1 «Разрешение» перевести в нижнее положение;
- привести переключатели на стенде в исходное положение см. п.3.
Т а б л и ц а 3.1
Результаты измерения и расчета механических характеристик МПТ
n, об/мин | Ia, A | M, Н·м |
3.3. Расчеты и построения
1) Рассчитать коэффициент С по выражению (2.6) и электромагнитный момент, создаваемый испытуемой машиной постоянного тока, по выражению (2.5).
2) Построить снятые механические характеристики двигателя n = f (M).
3.4. Контрольные вопросы
1) В чем преимущество тормозных режимов МПТ по сравнению с механическими системами торможения?
2) Как осуществляется переход в режим динамического торможения?
3) В чем суть режима динамического торможения?
4) В чем преимущества и недостатки режима динамического торможения от других тормозных режимов МПТ?
5) Как изменяется наклон механических характеристик при увеличении сопротивления в цепи якоря?
4. исследование механических характеристик
асинхронной машины в двигательном
и генераторном режиме и противовключении
Ц е л ь р а б о т ы: исследовать работу асинхронной машины в двигательном и генераторном режиме и противовключении, построить соответствующие механические характеристики [].
4.1. Краткие теоретические сведения
Общие понятия о характеристиках электрических машин, режимах работы и их расположении на координатной плоскости приведены в теоретических сведениях лабораторной работы №2. С энергетической точки зрения все режимы работы асинхронной машины соответствуют описанным выше режимам для машин постоянного тока и характеризуются теми же превращениями энергии из одного вида в другой. Различие состоит лишь в схемах включения и принципах работы.
Во всех режимах работы, рассматриваемых в данной лабораторной работе, обмотка статора АМ должна быть подключена к источнику переменного синусоидального напряжения, создающего симметричную систему токов в фазах обмотки и круговое магнитное поле вращающееся в воздушном зазоре с частотой n1. Эту частоту вращения также называют частотой вращения идеального холостого хода или синхронной частотой. Ротор АМ вращается с частотой n.
Соотношение скоростей магнитного поля и ротора в различных режимах работы АМ:
- генераторный режим: n1 < n < ∞;
- идеальный холостой ход: n = n1;
- двигательный режим: 0 < n < n1;
- режим короткого замыкания: n = 0;
- торможение противовключением: –∞ < n < 0.
Электромагнитный момент асинхронной машины (АМ), в отличие от машин постоянного тока, имеет значительно более сложную зависимость от угловой скорости, чем выражение (2.3). Расчет электромагнитного момента АМ требует знания, как правило, неизвестных на практике величин всех сопротивлений обмоток машины.
Один из способов определения электромагнитного момента АМ основан на графическом методе.
Для этого при испытании асинхронной машины используют нагрузочную МПТ с независимым возбуждением, электромагнитный момент которой (MМПТ) можно определить по выражению (2.3). Регулируя скорость вращения ротора (n) путем изменения напряжения, подаваемого на якорь МПТ при неизменном магнитном потоке, снимают зависимость n = f (MМПТ) во всех режимах работы АМ. Данная зависимость графически представляет собой разрывную линию при изменении знака скорости (рис. 4.1).
Исходя из уравнения установившегося движения электропривода [Чиликин], для определения электромагнитного момента испытуемого двигателя необходимо к значению электромагнитного момента нагрузочной машины постоянного тока прибавить (с учетом знака) момент потерь:
МАМ = ММПТ + Мпот . (4.1)
 На рис. 4.1 показаны зависимости n = f (MМПТ), n = f (Мпот) и полученная путем сложения моментов в соответствии с (4.1) зависимость n = f (MАМ). Следует обратить внимание на то, что правая часть выражения (4.1) представляет собой алгебраическую сумму моментов, т. е. все три момента, входящие в данное выражение, могут быть как положительными так и отрицательными в зависимости от режима работы асинхронной машины.
На рис. 4.1 показаны зависимости n = f (MМПТ), n = f (Мпот) и полученная путем сложения моментов в соответствии с (4.1) зависимость n = f (MАМ). Следует обратить внимание на то, что правая часть выражения (4.1) представляет собой алгебраическую сумму моментов, т. е. все три момента, входящие в данное выражение, могут быть как положительными так и отрицательными в зависимости от режима работы асинхронной машины.
4.2. Методические рекомендации к проведению исследования
Для выполнения экспериментального исследования необходимо:
1) Изучить электрическую схему лабораторного стенда (рис. 4.2).
Записать паспортные данные машины постоянного тока: номинальные частоту вращения якоря nн, ток обмотки якоря Iан, мощность Pн.
2) Собрать на лабораторном стенде схему для исследования (рис. 4.2).
3) Привести переключатели схемы в исходное положение:
а) автоматы на модулях «Модуль питания стенда» и «Модуль питания» отключить;
б) на модуле «Модуль добавочных сопротивлений» переключатель установить в положение «0» (против часовой стрелки до упора);
в) на модуле «Тиристорный преобразователь» кнопку «Сеть» отключить, переключатель SA1 перевести в положение «Iя», SA2 – «Скорость», SA3 – «Руч», SA4 – «НМ», SA5 перевести в среднее положение «Стоп», SA6 «Разрешение» перевести в нижнее положение, движок потенциометра RP1 выкрутить против часовой стрелки до упора – в положение «0»;
г) на модуле «Модуль измерительный» переключатель мультиметра установить в положение «OFF»;
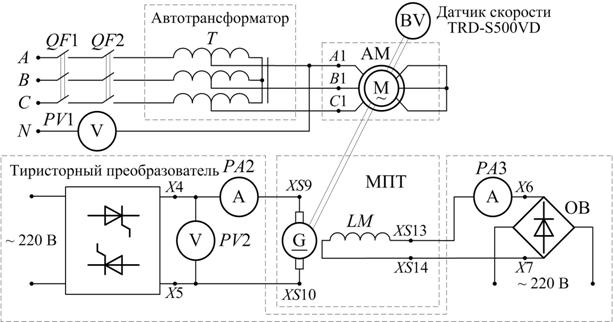
Рис. 4.2. Схема испытания асинхронной машины
в двигательном и генераторном режиме и противовключении
4) Перед включением необходимо, чтобы схема испытания была проверена преподавателем.
5) Последовательность действий при выполнении эксперимента:
а) на модуле «Модуль питания стенда» автомат включить, на модуле «Тиристорный преобразователь» кнопку «Сеть» включить, переключатель SA5 перевести в положение «Вперед», на модуле «Модуль измерительный» переключатель мультиметра установить в положение «V~»;
б) обратить внимание в следующих пунктах при снятии механических характеристик: ток якоря Ia испытуемой МПТ не должен превышать ±1 А;
в) на модуле «Модуль питания» включив автомат, проверить направление вращения ротора асинхронной машины в двигательном режиме;
г) при использовании в опыте для снижения напряжения на обмотке статора АМ автотрансформатора (уточнить у преподавателя, что именно используется с этой целью), вращая на нем ручку регулятора, установить напряжение на его выходе 90 В;
д) на модуле «Модуль питания» отключить автомат для остановки вращения ротора;
е) при использовании в опыте для снижения напряжения на обмотке статора АМ добавочных сопротивлений (см. п. 5.г) на модуле «Модуль добавочных сопротивлений» переключатель установить в положение «100»;
ж) на модуле «Тиристорный преобразователь» переключатель SA6 перевести в верхнее положение «Разрешение», вращая движок потенциометра RP1 по часовой стрелке, проверить направление вращения ротора машины постоянного тока в двигательном режиме и вновь остановить ротор, вернув движок потенциометра RP1 в исходное положение;
з) в случае если направление вращения ротора МПТ в двигательном режиме не совпало с направлением вращения ротора АМ в двигательном режиме, необходимо изменить порядок чередования фаз, подключенных к обмотке статора АМ;
и) на модуле «Тиристорный преобразователь» вращая движок потенциометра RP1 по часовой стрелке, установить частоту вращения ротора 1470 об/мин;
к) на модуле «Модуль питания» включить автомат;
л) для снятия механической характеристики в режиме генераторного торможения, идеального холостого хода, двигательного режима и короткого замыкания, регулируя скорость вращения ротора АМ с помощью МПТ (на модуле «Тиристорный преобразователь» вращать движок потенциометра RP1), записать показания тока якоря Ia и частоты вращения n в таблицу 4.1; рекомендуется фиксировать точки с шагом 100 об/мин, начав с частоты вращения 1600 об/мин, двигаясь к 0 об/мин;
м) для снятия механической характеристики в режиме торможения противовключением:
- на модуле «Тиристорный преобразователь» выкрутить движок потенциометра RP1 против часовой стрелки до упора в положение «0»;
- на модуле «Тиристорный преобразователь» переключатель SA5 перевести в нижнее положение «Назад»;
- на модуле «Тиристорный преобразователь» вращая движок потенциометра RP1 по часовой стрелке, записать показания тока якоря Ia и частоты вращения n в таблицу 4.1; рекомендуется зафиксировать точки с отрицательной частотой вращения равной -0 (начало движения ротора в обратном направлении вращения), -100 и -200 об/мин.
Т а б л и ц а 4.1
Результаты измерения и расчета механических характеристик АМ
U1экс, В | n, об/мин | Ia, A | Mэкс, Н·м | MМПТ, Н·м |
4.3. Расчеты и построения
1) Рассчитать коэффициент С по выражению (2.6) и электромагнитный момент, создаваемый машиной постоянного тока Мэкс, по выражению (2.5).
2) Зная момент, создаваемый нагрузочной машиной (Мэкс), полученный на стенде при пониженном напряжении (U1экс) на двигателе, рассчитать момент на валу двигателя, соответствующий номинальному напряжению (U1н = 380 В) при тех же значениях частоты вращения по выражению:
 . (3.5)
. (3.5)
3) Построить зависимости n = f (ММПТ).
4) По полученным зависимостям n = f (ММПТ) определить моменты потерь при заторможенном роторе (М0 пот) и при идеальном холостом ходе (Мх. пот) (см. рис. 4.1).
5) Построить кривую потерь n = f (Мпот) по двум найденным точкам: (Мпот; 0), (Мх. пот; n0).
6) Построить механическую характеристику АМ, графически сложив кривую n = f (ММПТ) с кривой потерь n = f (Мпот).
3.4. Контрольные вопросы
1) На какие характерные участки можно разделить график механической характеристики асинхронной машины?
2) В чем особенность определения электромагнитного момента асинхронной машины в данной работе?
3) При каком условии асинхронная машина переходит из двигательного режима в генераторный?
4) При каком условии асинхронная машина переходит из двигательного режима в режим торможения противовключением?
5) В чем физическая сущность момента потерь асинхронной машины?
