

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
4.
5. Выбор и обоснование компонентов автоматизированной системы
5.2. Выбор аппаратной платформы резервированной системы управления
5.2.1. Анализ платформы Rockwell Automation ControlLogix
Система ControlLogix обеспечивает дискретное управление, управление непрерывными процессами, приводами и сервоприводами, в сочетании с коммуникациями и современным вводом/выводом — в компактном и недорогом изделии. Система модульная, поэтому Вы можете эффективно проектировать, монтировать и модернизировать ее с существеннойэкономией на обучении и разработке. Минимальная система ControlLogix состоит из одного автономного контроллера и модулей ввода/вывода в одиночном шасси. Универсальная платформа для самых объемных приложений ControlLogix сочетает в себе все преимущества платформы Logix — общую среду программирования, общие сети, единый механизм управления. Интеграция средств программирования, контроллера и ввода/вывода позволяет сократить время на разработку и затраты при вводе в эксплуатацию и в процессе эксплуатации в нормальном режиме. Имея параметры памяти до 8 Мб, контроллеры ControlLogix поддерживают приложения для скоростных процессов и обеспечивают быструю обработку инструкций перемещения в рамках единого интегрированного решения. Вы можете решить ваши задачи в последовательном управлении и управлении перемещением посредством всего одного контроллера и одного программного пакета, обеспечивающего интеграцию управления, привода и двигателя через интерфейс SERCOS. Решение СontrolLogix также предоставляет возможности по синхронизации времени, что особенно полезно для приложений по обнаружению первого отказа и управлению перемещением.
Дополнительные модули аппаратного резервирования ControlLogix поддерживают полностью резервированные архитектуры контроллеров без дополнительного программирования для обеспечения высокой готовности. Программы автоматически перегружаются из главного контроллера в вспомогательный. Более того, в процессе сканирования вашей программы главный контроллер автоматически обновляет резервный контроллер при любом изменении данных, чтобы обеспечить их синхронизацию. При отказе главного контроллера управление автоматически переключается на резервную систему. «Плавный переход» при переключении с одного контроллера на другой обеспечивает сохранение всех важнейших функций, играющих особенно большое значение для приложений по управлению процессом.
Вы можете сочетать множество процессоров, коммуникационных модулей и устройств ввода/вывода без всяких ограничений. У вас есть возможность обеспечить взаимодействие сетей с помощью коммуникационных модулей ControlLogix через межсетевой шлюз ControlLogix без необходимости установки процессора в шасси шлюза, либо подключиться непосредственно к процессору ControlLogix. По мере развития вашей системы сеть позволяет распределять управление по дополнительным шасси. Вы получаете такие возможности, как просмотр данных с производственных участков с помощью web-страниц, получение уведомлений о тревогах по электронной почте или на пейджер, а также передача информации в разнообразные программные приложения, используя данные в формате XML (расширяемый язык разметки).
Имея более 40 модулей ввода/вывода в конструктиве шасси, система ввода/вывода ControlLogix предлагает: изолированный/неизолированный цифровой и аналоговый ввод/вывод, цифровой ввод/вывод с встроенной диагностикой, входы термодатчиков, специализированный ввод/вывод и интерфейсный модуль для гидравлики.[6]
В соответствии с требованиями по поддержанию безопасности SafetyIntegrityLevel 2 (SIL 2) все модули Controllogix готовы к замене без каких либо вспомогательных процедур и не требуют дополнительного обучения персонала. Поэтому сегодня многие крупные нефтяные компании используют ControlLogix, что позволяет им сэкономить более 80% цены по сравнению с другими вариантами. Расширенная диагностика и высокая надежность — это стандарт для процессоров, модулей ввода/вывода и коммуникационных продуктов ControlLogix.
5.2.2. Анализ резервированных систем автоматизации SIMATIC S7-400H
Программируемые контроллеры Simatic S7-400H – это контроллеры с резервированной структурой для построения систем автоматизации повышенной надежности. Система S7-400H состоит из двух идентичных подсистем, работающих по принципу ведущий-ведомый. В основу построения программируемых контроллеров Simatic S7-400H положен принцип горячего резервирования с поддержкой функций безударного автоматического переключения на ведомый резервный базовый блок в случае отказа ведущего базового блока. В соответствии с этим принципом при нормальной работе оба базовых блока находятся в активном состоянии и синхронно выполняют одну и ту же программу. При появлении отказа все функции управления принимает на себя исправный базовый блок контроллера. Таким образом обеспечивается надежная автоматизация непрерывных процессов и процессов с высокими требованиями к надежности функционирования систем автоматизации.
Операционная система центральных процессоров S7-400H выполняет все необходимые функции резервирования и обеспечивает поддержку:
· обмена данными между базовыми блоками
· идентификации отказов и ввода в работу резервного блока
· синхронизации работы базовых блоков
· тестирования системы
Для гарантированного безударного включения резерва между базовыми блоками контроллера необходима надежная скоростная синхронизирующая связь. Эта связь поддерживается через оптические кабели, соединяющие два центральных процессора. Функции синхронизации поддерживаются операционной системой контроллера и не требуют программирования со стороны пользователя. В S7-400H используется событийная синхронизация, выполняемая в моменты:
· прямого доступа к входам-выходам системы
· обработки сигналов программных и аппаратных прерываний
· получения аварийных сообщений
· обновления времени пользователем
· модификации данных коммуникационными функциями
· В результате оба базовых блока контроллера работают:
· с одной и той же программой пользователя
· с одними и те ми же блоками данных
· с одним и тем же содержимым области отображения процесса
· с одними и те ми же внутренними данными (битами памяти, таймерами, счетчиками и т. д.)
Это позволяет поддерживать оба базовых блока в одинаковых состояниях в полной готовности безударного приема на себя всех функций управления. Для мониторинга своего состояния программируемые контроллеры S7-400H обеспечивают поддержку широкого спектра функций самодиагностики. О любой выявленной проблеме формируется отчет.[7]
5.3. Выбор датчиков температуры, давления и уровня
5.3.1. Датчики температуры, давления и уровня
Термопреобразователи (датчики температуры) предназначены для непрерывного измерения температуры различных рабочих сред (например, пар, газ, вода, сыпучие материалы, химические реагенты и т. п.), неагрессивных к материалу корпуса датчика.
Модели датчиков с резьбовым креплением выпускаются в стандартном исполнении с метрической резьбой.
Для рассматриваемой задачи наиболее подходящими для решаемой задачи будут датчики на основе термосопротивления типа ДТС фирмы ОВЕН. На рисунке 4.1 представлен выбранный для решения поставленной задачи датчик в конструктивном исполнении с коммутационной головкой (модель ХХ5).
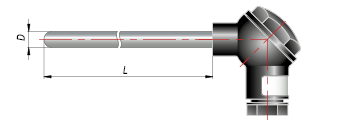
Рисунок 4.1 – Конструктив датчика температура
Номинальная статическая характеристика выбранного датчика – ДТС 100М, что позволяет производить измерения в диапазоне от -50 до +180 градусов.
Для надёжного и точного измерения давления воды решено использовать датчики давления для сложных условий в полевом корпусе из серии ОВЕН ПД100.
Датчики ОВЕН ПД100 модели 115 представляют собой преобразователи давления с измерительной мембраной из нержавеющей стали и «полевым корпусом» с кабельным вводом под гибкий кабель 6 – 8 мм.
Данная модель характеризуется повышенной устойчивостью к эксплуатации в тяжелых условиях (в условиях Крайнего Севера и т. п.) и наличием взрывозащищенного исполнения 1ExdIICT6Gb.

Рисунок 4.2 – Конструктив датчика давления
Преобразователи данной модели предназначены для систем автоматического регулирования и управления в промышленности на основных и вторичных производствах, расположенных в сложных климатических и иных условиях, требующих применения оборудования в «полевом» корпусе газотранспортных и газораспределительных системах, нефтепромыслах, объектах транспортировки нефти, НПЗ, объектах энергетики и т. п.
В результате анализа схемы автоматизации можно сделать вывод, что по условиям задачи требуется контролировать дискретные уровни жидкости. В частности, это используется для запуска и остановки насосов.
По соотношению цена/качество целесообразно использовать кондуктометрические 3-х стержневые датчики уровня типа ДСП.3 фирмы ОВЕН.
Кондуктометрические датчики уровня применяют для контроля одного или нескольких предельных уровней жидкости, проводящей электрический ток. Принцип действия кондуктометрических датчиков уровня основан на разнице в электрической проводимости жидкости (вода, кислоты, щелочи) и воздуха фиксируемой стержневым чувствительным элементом - электродом. Датчики уровня кондуктометрические бывают как одностержневыми (одноэлектродные), так и многостержневыми (многоэлектродными) для контроля нескольких уровней жидкости (рисунок 4.3).

Рисунок 4.3 – Конструктив датчика уровня жидкости
Датчик типа ДСП.3 предназначен для контроля двух (трех) уровней жидкости в резервуарах открытого и закрытого типа.
5.4. Выбор преобразователей частоты асинхронных двигателей
Частотный преобразователь – это устройство, предназначенное для преобразования переменного тока (напряжения) одной частоты в переменный ток (напряжение) другой частоты.
Выходная частота в современных преобразователях может изменяться в широком диапазоне и быть как выше, так и ниже частоты питающей сети.
Схема любого преобразователя частоты состоит из силовой и управляющей частей. Силовая часть обычно выполнена на тиристорах или транзисторах, которые работают в режиме электронных ключей. Управляющая часть выполняется на цифровых микропроцессорах и обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита).
Существует ряд критерий выбора преобразователя частоты, такие как:
1. мощностной ряд;
2. входное напряжение;
3. диапазон регулирования частоты;
4. количество входов управления;
5. количество выходных сигналов;
Поскольку в большинстве современных моделей преобразователей частоты, подходящих для решения поставленной задачи, сходны, то в первую очередь следует обратить внимание на доступные способы управления.
Количество входов управления. Дискретные входы нужны для ввода различных команд (пуск, стоп, выбор фиксированной скорости, реверс, аварийное торможение, изменение задания и т. п. – входы обычно программируются пользователем), аналоговые – для ввода сигналов задания и обратной связи (обычно 0-10В или 4-20мА). Цифровые (не путать с дискретными!) входы нужны для ввода высокочастотных сигналов от энкодеров (цифровых датчиков скорости и положения). Большое количество входов нужно тогда, когда планируется построение сложной системы управления со множеством управляющих сигналов. Сказать заранее хватит входов или не хватит сложно, поэтому чем больше входов, тем лучше, но отвергать модель только из-за малого количества входов не стоит.
Количество выходных сигналов. Дискретные выходы также используются для построения сложных систем (например, уже упоминавшихся насосных станций) и для вывода сигналов о различных событиях, а аналоговые – для питания показывающих приборов и опять же для построения систем управления. Рекомендации по выбору – те же, что и для входов.
Источник управления. Речь в данном случае идет об оперативном управлении, то есть о том, как будет осуществляться управление приводом в рабочем режиме. Может осуществляться через входы управления (см. выше), со встроенного или выносного пульта, а также по шине последовательной связи (от контроллера или компьютера). Часто допустимо комбинированное или переключаемое управление.
На основе анализа продукции различных производителей было выявлено, что наилучшими по своим характеристикам являются преобразователи частоты ОВЕН.
Векторные преобразователи частоты ОВЕН ПЧВх с функцией автоматической оптимизации энергопотребления предназначены для управления частотой вращения асинхронных двигателей в составе приводов промышленных установок, систем отопления, вентиляции и кондиционирования воздуха. Применение преобразователей частоты ОВЕН ПЧВх позволяет существенно расширить рабочий диапазон управления, повысить точность регулирования и быстродействие электропривода. Реальное снижение энергопотребления при использовании ОВЕН ПЧВх может достигать 35 % (рисунок 4.5).

Рисунок 4.5 – Преобразователь частоты векторный
ОВЕН ПЧВх имеет встроенный сетевой фильтр и фильтр в звене постоянного тока и соответствует требованиям ГОСТ Р 51522 по электромагнитной совместимости для оборудования класса «А».
ПЧВ1 и ПЧВ2 – линейка универсальных компактных преобразователей частоты общепромышленного применения малой и средней мощности. Модельный ряд ПЧВ1 включает 5 модификаций с однофазным входом мощностью 0,18…2,2 кВт и 6 модификаций с трехфазным входом мощностью 0,37…4 кВт, ПЧВ2 – 6 модификаций с трехфазным входом мощностью 5,5…22 кВт.
5.5. Расчет характеристик насосов
Определение числа оборотов колеса
Работоспособность насоса определяется условиями всасывания, зависящими от числа оборотов. При большом числе оборотов скорость на входе в рабочее колесо насоса может стать настолько большой, что падение давления жидкости на всасе приведет к кавитации. По этой причине расчет насоса начинают с определения предельного числа оборотов, выше которого при параметрах проектного задания кавитация неизбежна:
 (4.1)
(4.1)
Здесь C=900¸1500 - кавитационный коэффициент быстроходности насоса.
Рабочее число оборотов насоса выбирается, исходя из значений стандартного ряда частот, характерных для насосов данного типа. Например, для водяных насосов консольного типа характерными являются частоты 1450 и 2900 об/мин.
Тип рабочего колеса насоса определяется его быстроходностью (удельным числом оборотов ns). Для расчета этого показателя необходимо задать напор колеса, зависящий от числа ступеней i. При многоступенчатом варианте напор насоса равен сумме напоров отдельных ступеней. Напор ступеней принимается одинаковым.
Правильность выбора числа ступеней проверяется по значению удельного числа оборотов, которое для центробежных насосов изменяется в интервале ns = 40¸300.
При расчете удельного числа оборотов следует иметь в виду, что при умеренных напорах и больших подачах однопоточная схема может не реализовываться. В этом случае следует переходить к расчету колеса двухстороннего всасывания, используя половинное значение проектной подачи.
Расчет удельного числа оборотов
Заданные параметры насоса, число ступеней и число оборотов определяют его быстроходность:
 (4.2)
(4.2)
При оптимизации конструкции необходимо учитывать, что:
а) гидравлический и полный КПД центробежного насоса достигает своего максимального значения при ns =80¸150;
б) с уменьшением ns![]() рабочее колесо становится чрезмерно узким и неэкономичным.
рабочее колесо становится чрезмерно узким и неэкономичным.
Определение коэффициента полезного действия и мощности насоса.
Используя опытные данные, оценивают общий КПД и потребляемую насосом мощность (мощность на валу).
Общий КПД насоса равен:
h = hо hг hмех, (4.3)
где hо =  - объемный коэффициент полезного действия насоса, учитывающий объемные потери в насосе (
- объемный коэффициент полезного действия насоса, учитывающий объемные потери в насосе (![]() =0,85¸0,98); hГ - гидравлический коэффициент полезного действия, учитывающий потери насоса вследствие гидравлического трения, ударов и вихреобразования в проточной части (
=0,85¸0,98); hГ - гидравлический коэффициент полезного действия, учитывающий потери насоса вследствие гидравлического трения, ударов и вихреобразования в проточной части (![]() =0,8¸0,95):
=0,8¸0,95):
hг = 1 -  (4.4)
(4.4)
,
где D1п – приведенный диаметр рабочего колеса на входе.
D1п= . (4.5)
. (4.5)
Механический к. п.д. ![]() =0,9¸0,96.
=0,9¸0,96.
Отсюда мощность на валу насоса:
Nв= (4.6)
(4.6)
Определение входных размеров колеса
Определение входных размеров колеса, к которым относятся диаметр вала Dв, диаметр ступицы Dст и диаметр входа потока на рабочие лопатки колеса D1.
Диаметр вала рассчитывается по условию обеспечения необходимой прочности и прогиба в зависимости от величины мощности на валу и числа оборотов. Прогиб вала вследствие действия поперечных сил не должен превосходить половины минимального зазора в уплотнениях. Кроме того, рассчитывается критическое число оборотов вала для предотвращения резонансных колебаний.
Предварительно диаметр вала оценивают по формуле:
Dв =  , (4.7)
, (4.7)
где [t] – допустимое напряжение кручения, кг/см2.
Для стальных валов [t] = 120¸200 кг/см2.
Диаметр ступицы колеса:
Dст=(1,6¸2,0)*Dв (4.8)
Длина ступицы колеса:
Lст=1,4*Dст (4.9)
Диаметр входа на рабочие лопатки:
 (4.10)
(4.10)
Определение элементов треугольника скоростей на входе жидкости в каналы рабочего колеса
Окружная скорость определяется по формуле:
U1 =  . (4.11)
. (4.11)
Скорость входа в рабочее колесо определяется по формуле:
С0 = (4.12)
(4.12)
Полагая вход потока в колесо радиальным (a1=900 и С0=С1=С1r), определим из входного треугольника угол входа потока на лопасти колеса
b1 =![]() . (4.13)
. (4.13)
Угол b1 обычно лежит в пределах 15¸300.
Относительная скорость определяется по формуле:
W1 = ![]() .
.
По полученным значениям U1, c1, W1 строим входной треугольник скоростей.
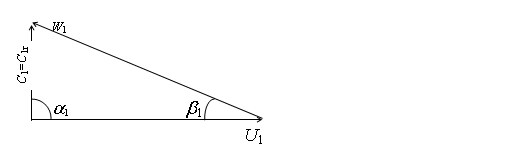
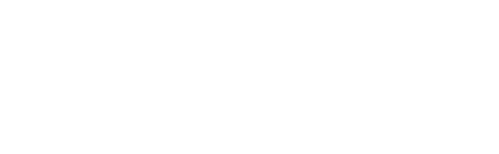
Рис. 4.6. Треугольник скоростей на входе жидкости в каналы рабочего колеса.
Определение элементов треугольника скоростей на выходе потока из рабочего колеса
Угол выхода потока существенно зависит от коэффициента быстроходности ns.
sinβ2 = k sinβ1.
Значения k принимаются по таблице:
ns | 35 | 40 | 50 | 60 | 70 | 80 | 90 | 100 | 120 | 220 |
k | 2,5 | 2,12 | 1,76 | 1,6 | 1,5 | 1,45 | 1,4 | 1,36 | 1,3 | 1,1 |
Окружная скорость определяется по формуле:
U2 =  ,
,
где С2r = C1r = C0.
Проекция абсолютной скорости выхода потока на направление окружной скорости определяется по формуле:
С2u =![]()
Абсолютная скорость выхода определяется по формуле:
С2 = ![]() .
.
Относительная скорость выхода определяется по формуле:
W2 = ![]() .
.
По полученным значениям U2, С2r, W2 строим треугольник скоростей на выходе потока из рабочего колеса.
Рис. 4.7. Треугольник скоростей на выходе жидкости из рабочего колеса.
Достаточно двух простых арифметических вычислений, чтобы рассчитать требуемые параметры насоса; это представлено в виде формул. Практики должны отметить для себя две пары констант, необходимых для правильного расчёта параметров насоса:
Для расчёта параметров необходимо определить только неблагоприятный участок трубопровода.
Данные значения можно легко запомнить, достаточно только один раз их разъяснить. На практике они незаменимы для быстрого и надёжного выбора насоса.
Расчёт требуемой производительности циркуляционных насосов является важным условием правильно работы насосной станции.
