

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Министерство образования и науки РФ
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР)
Кафедра автоматизированных систем управления (АСУ)
К ЗАЩИТЕ ДОПУСТИТЬ
Заведующий кафедрой АСУ
Д-р техн. наук, профессор
_____________
«___»______________ 2015 г.
УСТРОЙСТВО УПРАВЛЕНИЯ МОБИЛЬНЫМ РОБОТОМ. ПЛАНИРОВАНИЕ ГЛОБАЛЬНОГО МАРШРУТА.
Выпускная квалификационная работа по направлению 230100.62
«Информатика и вычислительная техника»
Студент гр. 431 ____________ «___» _________ 2015 г. | |
Руководитель Доцент кафедры АСУ, к. т. н. ______________ «___» _________ 2015 г. |
Томск 2015
Министерство образования и науки РФ
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР)
Кафедра автоматизированных систем управления (АСУ)
УТВЕРЖДАЮ
Заведующий кафедрой АСУ
Д-р. техн. наук профессор
_____________
«____» ____________2015 г.
ЗАДАНИЕ
на выпускную квалификационную работу студенту
Алькову Ивану Николаевичу
группа 431 факультет ФСУ
1. Тема выпускной квалификационной работы Устройство управления мобильным роботом. Планирование глобального маршрута.
(утверждена приказом по ВУЗу № 2368ст от 08.06.15 )
2. Срок сдачи студентом законченного проекта 14.06.2015
3. Исходные данные к выпускной квалификационной работе
3.1. Устав учреждения
3.2. Справочная информация по робототехнике
3.3. Литературные источники
4. Содержание расчетно-пояснительной записки (перечень подлежащих разработке вопросов).
4.1. Описание предметной области
4.2. Проектирование устройства управления мобильным роботом
4.3. Описание пользовательского интерфейса
5. Перечень графического материала (с точным указанием обязательных чертежей):
5.1. Титульный лист
5.2. Структура системы управления мобильным роботом (СУМР)
5.3. Цели и задачи
5.4. Аналоги транспортной робототехники
5.5. Обоснование выбора программных сред разработки
5.6. Постановка задачи
5.7. Схема элементов пользовательского интерфейса
5.8. Пользовательский интерфейс
5.9. Результаты работы
6. Дата выдачи задания:
Руководитель ВКР
доцент каф. АСУ, к. т. н.
Задание принял к исполнению
«__25__» _______05________ 2015г.
РЕФЕРАТ
Пояснительная записка к ВКР 41 страниц, 23 рисунков, 12 источников.
УСТРОЙСТВО УПРАВЛЕНИЯ МОБИЛЬНЫМ РОБОТОМ: ПЛАНИРОВАНИЕ ГЛОБАЛЬНОГО МАРШРУТА.
Объектом разработки является мобильный робот, т. е. объект транспортной робототехники.
Цель работы – создание мобильного робота, способного функционировать в неизвестной среде паркового типа.
Ключевые слова: мобильный робот (МР), система управления мобильным роботом (СУМР), устройство управления мобильным роботом (УУМР), окружающая среда (ОКС), интеллектуальный робототехнический комплекс (ИРТК), интеллектуальный мобильный робот (ИМР), модель внешней среды (МВС), зона перемещения (ЗП).
Бакалаврская работа (БР) содержит:
-описание предметной области;
-проектирование информационной системы;
-описание интерфейса и основных функций реализованной системы; Результатом выполнения дипломного проекта является создание приложения, позволяющего реализовать поставленные цель и задачи.
Работа выполнена в текстовом редакторе Microsoft Office Word 2007 с применением приложений AdobePhotoshop, Paint. В качестве графического материала представлена презентация, выполненная в Microsoft Office Power Point. Информационная система разработана с помощью среды разработки интерфейса C# Windows Form`s.
THE ABSTRACT
Explanatory note to the WRC 41 pages, 23 figures, 12 sources.
CONTROL mobile robots: Plan for global routes.
The object is to develop a mobile robot, ie object transport robotics.
Purpose - to provide a mobile robot that can operate in an unknown environment, park type.
Keywords: mobile robot (MR), the control system of the mobile robot (Soomro), mobile robot control device (UUMR), environment (ACS), an intelligent robotic system (IRTC), the intelligent mobile robot (WRI), a model of the environment (MBC ) zone transfer (RFP).
Bachelor's (BR) provides:
description of the subject area;
design of information systems;
description of the interface and basic functions of the implemented system; The result of the diploma project is to create an application that allows to realize the set goal and objectives.
Work is executed in a text editor Microsoft Office Word 2007 with the application AdobePhotoshop, Paint. As the graphical presentation of the material, made in Microsoft Office Power Point. The information system developed with the help of development environments interface C # Windows Form`s.
СОДЕРЖАНИЕ
1 ВВЕДЕНИЕ. 7
2 ОПИСАНИЕ ПРЕДМЕТНОЙ ОБЛАСТИ.. 8
2.1 Общие характеристики транспортной робототехники. 8
2.2 Цели и задачи устройства управления мобильным роботом (УУМР). 8
2.3 Планирование глобального маршрута мобильного робота (МР). 10
2.4 Известные модели внешней среды (МВС). 13
2.5 Алгоритмы планирования маршрута мобильного робота. 14
2.5.1 Алгоритмы планирования маршрута по полной модели среды.. 15
2.5.2 Алгоритмы, не накапливающие информацию о среде. 18
2.5.3 Алгоритмы с накоплением локальной информации. 22
2.6 Методы поиска маршрута на карте. 25
2.6.1 Методы пересечения линий. 25
2.6.2 Методы потенциала. 26
2.6.3 Методы на взвешенном графе. 27
2.6.4 Другие методы.. 28
3 ПРОЕКТИРОВАНИЕ УСТРОЙСТВА УПРАВЛЕНИЯ МОБИЛЬНЫМ РОБОТОМ... 29
3.1 Существующие аналоги транспортной робототехники. 29
3.2 Обоснование выбора программной среды разработки проектируемого устройства управления мобильным роботом.. 33
3.3 Постановка задачи. 35
4 ОПИСАНИЕ ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА.. 36
ЗАКЛЮЧЕНИЕ. 41
1 ВВЕДЕНИЕ
В последнее время большое внимание уделяется проблемам транспортной робототехники. Так, например, в данный момент успешно проходят испытания в городских условиях 30 беспилотных автомобилей фирмы Google. В нашей стране реализуется проект создания подобных грузовых автомобилей КамАЗ, способных передвигаться по загородным магистралям. На этот проект правительством РФ выделено 19 миллиардов рублей. Автономные транспортные работы используются для исследования планет (луноходы, марсоходы), в промышленности, военном деле и в других областях. Т. е. подобные ТС освобождают человека от выполнения трудной, опасной и монотонной работы. Таким образом, очевидна актуальность темы данной работы.
Перед нами была поставлена задача создания мобильного робота (МР), способного функционировать в неизвестной среде паркового типа. В процессе движения от точки старта до заданной точки цели, МР должен строить карту местности (ОКС), обнаруживать препятствия и отмечать их на карте. В дальнейшем, на основе построенной карты местности, с использованием различных алгоритмов, возможно определение кратчайших траекторий движения от точки старта до цели.
Целью выпускной квалификационной работы является разработка устройства управления мобильным роботом.
Основные задачи ВКР:
- изучить предметную область транспортной задачи;
- рассмотреть аналоги транспортной робототехники;
- исследовать техническое обеспечение мобильных роботов;
- cформулировать необходимость выбранного оборудования и программного обеспечения;
- выбрать модель внешней среды (МВС);
- определит алгоритм планирования глобального маршрута;
- определить метод поиска пути на карте;
2 ОПИСАНИЕ ПРЕДМЕТНОЙ ОБЛАСТИ
2.1 Общие характеристики транспортной робототехники
Задача робототехники – это создание и применение роботов и основанных на их использовании робототехнических систем различного назначения. Возникнув на основе механики и кибернетики, робототехника породила новые направления их развития. Для механики это, прежде всего, связанно с многозвенными механизмами типа манипуляторов, а для кибернетики – с интеллектуальным управлением, которое требуется для роботов с искусственным интеллектом.
Робота можно определить, как универсальный автомат для осуществления механических действий, подобных тем, которые производит человек, выполняющий физическую работу. При создании первых роботов и вплоть до сегодняшнего дня образцом для них служат физические возможности человека. Именно стремление заменить человека на тяжёлых работах и породило сначала идею робота, затем первые попытки её реализации (в средние века) и, наконец, обусловило возникновение и развитие робототехники и роботостроения.
2.2 Цели и задачи устройства управления мобильным роботом (УУМР)
Задача, которую мы пытаемся решить, состоит в том, чтобы МР из заданной точки старта смог достичь заданной точки цели. Поиск пути рассматривается как проблема нахождения кратчайшего пути от начальной точки до цели, обходя препятствия, избегая препятствия с минимумом затрат (топливо, время, расстояние и т. д.). В процессе перемещения решается задача построения траектории и движения вдоль нее. Можно потратить усилия только на одно из них. С одной стороны, искушённый первопроходец в сочетании с тривиальным алгоритмом движения найдёт путь, когда объект начнёт двигаться и объект будет идти по этому пути, не обращающая внимание на всё остальное. С другой стороны, система только для движения не способна предусмотреть будущее, чтобы найти путь (вместо этого, начальный "путь" будет прямой линией), но вместо того, чтобы делать шаг, с учетом местных условий в каждой точке. Лучшие результаты достигаются при использовании поиска пути и алгоритме движения.
Движение для единственного МР выглядит тривиальным. Поиск пути, в свою очередь, носит сложный характер. Зачем нужен поиск пути? Рассмотрим следующую ситуацию, рисунок 2.1:
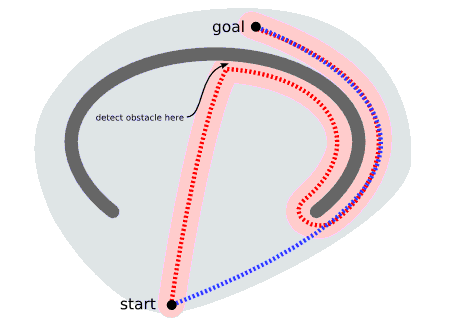
Рисунок 2.1 – Движение объекта
МР изначально находится в точке старта. Необходимо достичь точки цели. В области, которая сканируется сенсорными датчиками (показано розовым цветом) препятствия не обнаружены. Поэтому МР движется к точке цели по кратчайшей траектории. В верхней части рисунка МР «обнаруживает» препятствие и меняет направление движения. Затем определяется траектория вокруг препятствия U-образной формы (красная дорожка). В отличие от этого, подсистема управления движением сканировала бы большую площадь (показано светло-голубым). В этом случае был бы найден более короткий маршрут движения С – Ц (обозначен синим цветом).
Однако, можно продолжить работу алгоритма планирования движения для обхода ловушки, как показано выше. Можно не создавать вогнутых препятствий или аппроксимировать их выпуклыми оболочками и трактовать как опасные (входить только тогда, когда цель находится внутри):
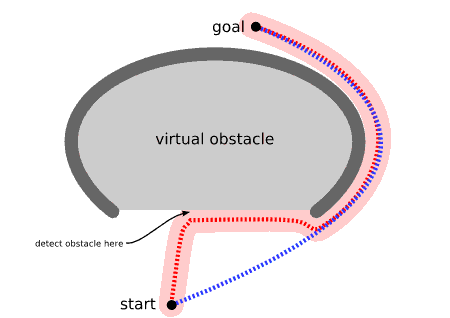
Рисунок 2.2 – Обход ловушки
Алгоритмы поиска пути позволяют «смотреть вперед» и строить планы, а не ждать появления проблем. Существует компромисс между планированием в поиске пути и реагированием в алгоритме движения. Планирование, как правило, медленнее, но дает лучшие результаты. Движение же происходит быстрее, но в этом случае МР может попасть в тупик. Если ВС меняется достаточно часто, заблаговременное планирование является менее ценным. В этом случае рекомендуется использовать оба подхода: поиск пути для большой картинки, медленного изменения препятствий и длинных путей; и алгоритм движения для локальных областей, быстро меняющегося мира и коротких путей.
2.3 Планирование глобального маршрута мобильного робота (МР)
Известно, что задача планирования глобального маршрута мобильного робота (МР) и дальнейшее его управление движением по синтезированной, оптимальной, в некотором смысле, траектории должна решаться на основе "знаний" о местности - зоне функционирования или зоне перемещения (ЗП). То есть должны существовать некие модельные представления о внешней среде (априорная информация, представленная в виде совокупности моделей внешней среды, различного уровня, абстракции для каждого уровня иерархии системы управления мобильным роботом (СУМР) и хранящаяся в памяти робота). При этом часть решений может приниматься только на базе априорных данных о внешней среде. Например, планирование глобального маршрута движения транспортного робота по карте местности. Другая же часть решений вырабатывается путем сопоставления реальной действительности (текущей информации, поступающей как от системы восприятия самого мобильного робота (МР), так и от внешних систем и приборов, например, аэрокосмическая информация) с модельными данными, например, определение местоположения робота в ЗП.
Представляет интерес задача формирования внешней среды МР. Большинство разработанных ранее навигационных систем мобильного робота (МР) используют заранее созданную карту местности или осуществляют накопление информации о внешней среде с помощью ручного или дистанционного управления человеком до начала реальной работы. Но такая модель внешней среды (МВС) является неизменной, жестко заданной, что неприемлемо для интеллектуальных мобильных роботов (МР), так как внешняя среда, в которой предполагается их применение, является сложной и изменчивой. Поэтому мобильный робот (МР) должен быть способен самостоятельно строить карту местности на основе различной информации и последовательно модернизировать эту карту. Накопление локальной информации в процессе функционирования робота способствует созданию более полных моделей среды, что открывает потенциальную возможность построения достаточно рациональных маршрутов не только для адаптивных, но и интеллектуальных робототехнических комплексов (ИРТК).
Известны различные способы формирования МВС: клеточные, контурные, графовые и т. д., обладающие своими достоинствами и недостатками. Рассмотрим другие подходы к решению данной задачи.
В работе МВС предлагается строить на основе растровых данных - двумерной сетки измеренных числовых значений, где пространственные данные поверхности спроецированы на плоскость сетки. Значения в каждой дискретной точки сетки (пикселе) обычно интерпретируются как среднее значение высоты области, спроецированной на каждую точку сетки (смотрите рисунок 2.3). Возможны и другие интерпретации в зависимости от источника поступления информации о поверхности. Это примерно аналогично традиционному представлению географических данных в виде карт.
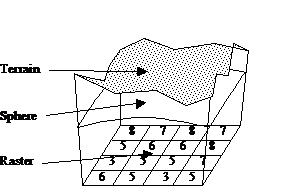
Рисунок 2.3 - Пример высот, представленных в виде растра высоты
Базируясь, например, на спутниковых изображениях вместе с наземной проверкой правильности данных, возможно, создание модели доминирующего типа местности. В представленных примерах каждый растровый элемент относят к одному из 16 классов местности; например, одиночный камень, песок, кустарник, болото и т. д. Разрешение интервала сетки составляет 25 метров, хотя может быть и меньше. С помощью различных приборов может быть измерена высота земной поверхности над уровнем моря, при этом вертикальное разрешение составляет 1 м.
Геометрические данные, упоминаемые как "векторные" данные, состоят из списков дискретных точек - координат поверхности и связанных с ними значений, необходимых для определения формы аппроксимирующих линий, кривых или поверхностей.
Данные, используемые для примеров, представленных в данной работе, имеют три класса векторов пути - малые, средние или большие пути, определенных как цепочки многоугольников.
Непроходимые участки местности, например, реки или минные поля, могут также представляться как различные типы векторных данных.
2.4 Известные модели внешней среды (МВС)
Наиболее известными и достаточно простыми для реализации являются три модели внешней среды (МВС): клеточная, контурная и графовая.
1. Клеточная модель. Клеточные представления строятся путём разбиения карты местности на однородные ячейки различной структуры (треугольной, прямоугольной, гексагональной и др.). Каждой ячейке ставится в соответствие определённый признак, который определяет стоимость прохождения данного участка роботом, исходя из требований к формируемому движению. Иногда вводят ещё одно значение признака, которое соответствует отсутствию достоверной информации о некоторой ячейке. Формирование карты осуществляется путём перемещения робота к границе известной территории и «раскрытия» неизвестной клетки.
Описанная модель обладает двумя недостатками. Первый сводится к невозможности описания препятствий или свободных областей на местности однородными структурами, так как всегда будет существовать неточность в определении действительных размеров или форм объектов. Второй недостаток проявляется при уменьшении площади ячеек с целью достичь более полной детализации объектов на карте, что ведёт к увеличению аппаратных ресурсов бортовой ЭВМ и времени на определение роботом направления движения.
2. Контурная модель. Формирование МВС осуществляется путём выявления роботом контуров препятствий и областей с различной проходимостью. При этом аппроксимация участков местности проводится многоугольниками любой формы (выпуклыми, вогнутыми) с большим количеством вершин, если объект имеет сложную форму. Благодаря этому достигается более – менее точное представление рабочего района робота. Как и в случае клеточного представления, каждой области ставится в соответствие некоторый признак, зависящий от требований к формируемому движению.
Описываемая структура карты получается сложной, поэтому целесообразно представлять участки местности только выпуклыми многоугольниками, что значительно упрощает разработку алгоритмов для мобильного робота.
Данный способ представления карты местности также имеет ряд недостатков, но основной из них – это необходимость правильного (связанного) формирования многоугольников. Если будут существовать разрывы (окна) между соседними участками (многоугольниками) карты или несовпадение границ областей, то в результате поиска оптимального пути мобильного робота маршрут может быть вообще не найден или быть неоптимальным.
3. Графовая модель. Графовые представления служат для формирования абстрактной МВС. В настоящий момент известны методы построения МВС с помощью графов видимости и графов центров свободных участков местности.
Однако абстрактное формирование МВС приводит к потере топографической информации о ВС, что в свою очередь влечёт неоптимальное планирование пути робота.
Рассмотренный ниже алгоритм построения МВС комбинирует рассмотренные выше методы и основывается на представлении ВС в виде топологического графа.
2.5 Алгоритмы планирования маршрута мобильного робота
Исходными данными для любого алгоритма прокладки маршрута автономного мобильного робота является следующая информация: описание ВС, описание самого робота, начальное и целевое состояние робота, требование к формируемому движению (условия безопасности, критерии качества) и дополнительные сведения (возможности и ограничения вычислительной реализации, условия применимости разных алгоритмов и т. п.).
Интеллектуальный мобильный робот (ИМР) действует в неизвестной среде или известной частично, самостоятельно приобретая знания о ней непосредственно в процессе прокладки пути. При этом ИМР получает только “локальную” информацию в ограниченной окрестности местности, которая определяется дальностью действия сенсорной системы. Тогда при первой прокладке маршрута в сложной незнакомой среде ИМР может петлять или быть в тупиках, что ведет к построению маршрута далеко не оптимального. Поэтому постановка задачи для ИМР сводиться к нахождению любого допустимого пути без столкновения с препятствиями при приемлемых затратах времени и ресурсов.
Поэтому в соответствии с постановкой задачи для ИМР можно выделить три класса алгоритмов планирования маршрута автономных мобильных роботов:
1. Алгоритмы планирования маршрута по полной модели среды.
2. Алгоритмы, не накапливающие информацию о среде.
3. Алгоритмы с накоплением локальной информации о среде.
Первый класс алгоритмов используется, в большинстве случаев на самом верхнем уровне управления (стратегическое планирование), в то время как два последних класса алгоритмов предназначены для работы при тактическом планировании в незнакомой среде. Рассмотрим каждый класс алгоритмов в отдельности.
2.5.1 Алгоритмы планирования маршрута по полной модели среды
Гораздо более гибкими логическими возможностями обхода препятствий обладают алгоритмы использующие описания проблемной среды в виде графов. При клеточном разбиении местности каждой клетке ставится в соответствие вершина графа, а ребра графа соединяют вершины, которые поставлены в соответствие соседним клеткам. Таким образом получаем плоский однородный граф, который является абстрактной моделью проблемной среды робота, причем одна из вершин графа является точкой старта, а другая - цели. В результате имеем хорошо формализуемую задачу поиска оптимального пути на графе, для решения которой можно использовать известные алгоритмы упорядоченного перебора возможных путей Мура, Дейкстры, Нильсона, Ли, Белламана и др. Основной недостаток данных методов заключается в том, что с ростом размерности графа время выполнения алгоритмов растет по экспоненциальному закону. Поэтому в большинстве случаев пытаются модифицировать рабочее пространство робота создать специализированные нейроподобные вычислительные системы, позволяющие ускорить перебор путей на графе. Изменение конфигурационного пространства робота обычно осуществляют тремя путями. Первый - это “загрубение” представления среды и ограничения маневренности робота путем увеличения размеров ячеек. Такой способ снижает точность и безопасность движения. Второй путь заключается в построении дерева (иерархического графа) непересекающихся подграфов (рисунок 2.4). Каждой вершине подграфа ставится в соответствие подграф более низкого уровня, а также вес, равный среднему весу вершин подграфа низшего уровня. Получаем многоуровневую модель описания местности, в которой степень детализации, а следовательно и количество вершин подграфа уменьшается по мере приближения к корню дерева, что ведет к потере точности прокладки траектории робота, которая теперь проходит через выбранные ячейки, представляющие собой целые совокупности ячеек исходного разбиения.
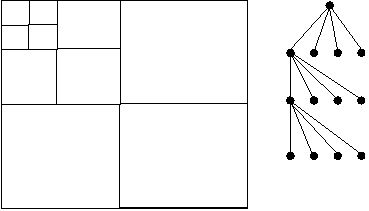 |
Рисунок 2.4 - Иерархический граф непересекающихся подграфов
Третий способ модификации карты местности достигается в виде компактного описания ВС путем аппроксимации участков местности различными геометрическими фигурами. Благодаря предварительному компактному математическому описанию препятствий и свободных областей карта задается сравнительно небольшим числом параметров. Наиболее подходящим является способ аппроксимации многоугольниками. В этом случае абстрактную модель проблемной среды можно задать двумя известными способами: графом видимости и графом центров.
Граф видимости (рисунок 2.5) строится следующим образом.
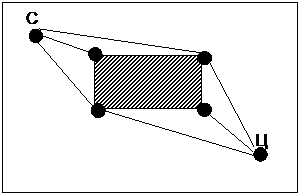 |
Рисунок 2.5 - Граф видимости
Вершины графа соответствуют вершинам препятствий. Вершина соединяется с другой вершиной только в том случае, если другая вершина видна из исходной, т. е. путь из вершине к вершине лежит по прямой в свободном пространстве. Каждому ребру графа видимости ставится в соответствие определенный вес. Также в граф включаются вершины точек начального и целевого положение робота. В качестве альтернативы графу видимости можно использовать граф центров (рисунок 2.6). Вершины графа представляют собой геометрические центры тяжести свободных областей, разбитых на выпуклые многоугольники, причем соседние области соединяются только одной общей стороной многоугольника, а ребра графа соединяют центры соседних областей.
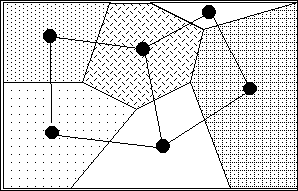 |
Рисунок 2.6 - Граф центров областей карты
Данный способ построения проблемной среды является безопасным при перемещении робота и более эффективным, по сравнению с другими методами. Однако такие способы компактного описания местности могут потребовать значительных вычислительных затрат на предварительную аппроксимацию препятствий, определения отношений видимости или других преобразований. Описанные методы могут быть использованы частично при прокладке маршрута МР в адаптивном режиме по локальной информации о внешней среде.
2.5.2 Алгоритмы, не накапливающие информацию о среде
Множество предлагавшихся методов построения движения МР в незнакомой среде можно условно разделить на две группы. В первую группу входят способы однократной прокладки пути к цели с использованием текущей локальной информации, но не предусматривающие накопление этой информации. Вторая группа охватывает разнообразные алгоритмы планирования маршрута, объединяемые тем, что в них локальная информация накапливается в памяти для создания модельного описания среды в той или иной форме, которое активно используется при выборе действий робота.
Рассмотрим известные методы построения движения МР без накопления локальной информации. Такие методы, как правило, базируются на эвристических правилах выбора подцели для очередного шага движения робота в пределах его информативной окрестности. Например, один из первых мобильных роботов Shakey в качестве очередной подцели выбирал геометрический центр треугольника АВR, где А и В - концы видимого системой технического зрения препятствий, а R - текущее положение робота (рисунок 2.7).
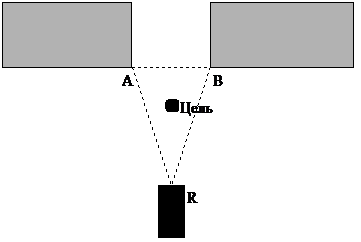 |
Рисунок 2.7 - Эвристическое правило робота Shakey
Другой алгоритм предлагает наличие дальномера, который способен определить расстояние до препятствий. Пространство вокруг робота разделяется на 72 сектора (рисунок 2.8).
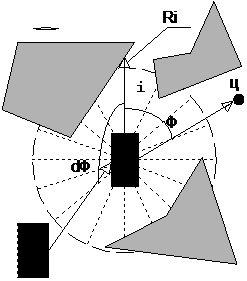 |
Рисунок 2.8 - Эвристическое правило робота, основанное на разбиении пространства на сектора
На каждом шаге алгоритма для всех секторов рассчитывается значение локального критерия:
где
![]() - длина прямолинейного свободного прохода в i - ом секторе,
- длина прямолинейного свободного прохода в i - ом секторе,
![]() - угол поворота между i - ым сектором и направлением движения робота на предыдущем шаге;
- угол поворота между i - ым сектором и направлением движения робота на предыдущем шаге;
![]() - постоянные весовые коэффициенты.
- постоянные весовые коэффициенты.
В качестве подцели выбирается точка, лежащая в секторе с номером  . Данный локальный критерий имеет ясный смысл, заключающийся в следующем. Первый член
. Данный локальный критерий имеет ясный смысл, заключающийся в следующем. Первый член ![]() характеризует стремление робота к цели, второй член
характеризует стремление робота к цели, второй член ![]() заставляет робота выбирать более длинные перемещения, третий член
заставляет робота выбирать более длинные перемещения, третий член ![]() устраняет “рысканья” - слишком частые смены направления. Недостаток описанных алгоритмов состоит в том, что по мере уменьшения размера информативной окрестности АР, возможность достижения точки цели резко снижается. Вторым недостатком является наличие большой вероятности “зацикливания” движения робота при любом неизменном направлении обхода препятствий.
устраняет “рысканья” - слишком частые смены направления. Недостаток описанных алгоритмов состоит в том, что по мере уменьшения размера информативной окрестности АР, возможность достижения точки цели резко снижается. Вторым недостатком является наличие большой вероятности “зацикливания” движения робота при любом неизменном направлении обхода препятствий.
К настоящему времени широкое распространение получили методы восприятия данных о ВС с помощью однородных управляющих структур на основе нейронных сетей. Рассмотрим моделирование такой структуры. Информация о местности поступает через сенсорную подсистему типа "фасеточный глаз", состоящий из множества фотоэлементов. Фотоэлементы преобразуют энергетические сигналы ВС (например, световые) в информационные сигналы, с помощью которых формируется двумерный план ВС в виде подмножеств разрешенных и запрещенных областей (бинарное разделение) как показано на рисунок 2.9.
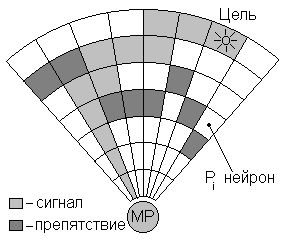 |
Рисунок 2.9 - Модель ВС на основе нейроподобной сети
Каждая ячейка модели ВС представляет собой нейрон Pi, который имеет четыре входа от соседних нейронов Y1-Y4, вход от фотоэлемента B (B=1 обозначает препятствие, B=0 - свободный участок), вход сигнала цели А и вход для сигнала сброса D. Выход нейрона поступает на входы четырех соседних нейронов. Процесс поиска пути подобен волновому процессу, который состоит из следующих шагов:
1. Определяется текущее положение робота на плане ВС - нейрон Рт.
2. Информация о местности в виде сигналов A или B поступает на нейроны. При этом нейроны, получившие В=1 блокируются, а один нейрон Рц, получивший сигнал А=1, начинает генерировать единичные сигналы. Все остальные нейроны считаются свободными.
3. Сигналы от Рц распространяются по соседним нейронам к нейрону Рт.
4. Первый сигнал, достигший Рт определяет направление следующего шага движения робота. Соответствующая команда подается к исполнительным механизмам для отработки элементарного движения.
Процесс повторяется до тех пор, пока робот, минуя препятствия, не достигнет цели. В каждом новом положении элементы сенсорной подсистемы оказываются направлены на другие участки ВС.
Для того чтобы алгоритмы обладали свойствами объективной завершенности их нередко дополняют правилами перехода от перемещения вдоль границы препятствия (wall-following) к переходу по свободным участкам. Причем направление движения перехода и место отрыва от препятствия определяется различными правилами.
Накопление локальной информации в процессе прокладки траектории движения МР способствует созданию более полных моделей среды, что открывает потенциальную возможность построения достаточно рациональных маршрутов не только для адаптивных, но и интеллектуальных мобильных роботов.
2.5.3 Алгоритмы с накоплением локальной информации
Наиболее простой способ накопления информации заключается в построении модели среды в процессе прокладки пути с помощью клеточных структур. Этот метод предполагает использование дополнительного типа ячейки - “серой”, о которой робот пока не имеет достоверных сведений. При попадании серых клеток в информативную окрестность движущегося робота происходит назначение неизвестным клеткам коэффициента проходимости, согласно выбранным критериям. Можно двояко трактовать серые клетки. В первом случае робот вначале считает серые клетки запрещенными и пытается проложить путь по известным свободным ячейкам. При неудаче серым клеткам приписывается большая трудность проходимости и затем маршрут перепланируется. Очевидно что робот будет “предпочитать” более длинные маршруты, проходящие по известной области. Во втором случае стратегия прокладки пути является более “активной”. Робот считает серые клетки свободными участками с малой стоимостью. Таким образом движение происходит до тех пор, пока не окажется, что серая клетка является непроходимым участком. После этого маршрут приходится перепланировать. Недостатком данных методов является, как уже упоминалось выше, трудность в вычислительной реализации алгоритмов с ростом числа ячеек.
Менее избыточными, но более сложными являются методы, использующие модели местности на основе аналитической аппроксимации участков карты с помощью компактного математического описания границ областей с последующем использованием графов видимости и графов центров. Обычно на таких графах временно вводят дополнительные вершины, например соответствующие точкам, которые при данном местоположении робота лежат в свободной области на границе “потери видимости” дальномера. Вначале робот условно считает, что из этих точек существует прямой путь к цели через неизвестные (“серые”) участки внешней среды. По мере перемещения робота временные вершины раскрываются на обычные вершины графа (вершины препятствий или центров свободных областей) либо на другие временные вершины. Недостатком данного метода является трудоемкий процесс сшивания участков границ аппроксимированных областей, который вызывает различного рода неоднозначности.
Более точным является метод, где робот строит карту в виде графа, которая дополнена метрической информацией. В ней указывается расстояние и относительный угол между двумя связанными вершинами графа. Вершины соответствуют определенным участкам в ВС. Карта содержит два различных типа участков (рисунок 2.10).
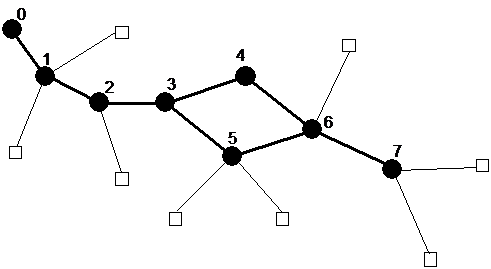 |
Рисунок 2.10 - Формирование карты местности в виде графа
Предсказанные участки (показаны квадратами). Предполагается, что эти участки с помощью сенсорной системы определены роботом, как свободные, но еще непосредственно им не посещены.
1. Подтвержденные участки (показаны закрашенными кругами). Участки фактически посещенные роботом.
Накопление информации о ВС осуществляется путем расширения известной части карты, которая уже составлена роботом, т. е. добавлением новых "предсказанных" участков в карте. После этого происходит перемещение робота для проверки, существуют ли "предсказанные" местоположения фактически или нет.
От своего начального местоположения, робот добавляет первый набор "предсказанных" участков к карте, и затем пытается двигаться к ближайшему "предсказанному" участку. Если робот физически способен переместиться в новый участок ВС не сталкиваясь с препятствиями, то "предсказанный" заменяется "подтвержденным", иначе этот это участок удаляется из карты. Всякий раз, когда участок добавляется к карте, происходит новое сканирование ВС для обнаружения свободных участков. Этот процесс повторяется, пока все "предсказанные" участки в карте не будут посещены роботом или не будут удалены. Недостатком данного подхода является отсутствие накопления данных о размерах свободных участков, а также зависимость от ошибок измерения пройденного расстояния, угла поворота и, соответственно, ошибки определения собственного местоположения.
Необходимо также упомянуть о существовании двух способов планирования пути по описанным выше частичным моделям среды. К первому способу относятся методы, в которых робот планирует сразу весь маршрут из точки своего текущего местоположения до цели. По мере получения новой информации в ходе перемещения по спланированному вначале пути производится перепланирование всего маршрута из нового положения в условиях обновленной карты. Результирующий путь в этом случае оказывается довольно извилистым и не всегда происходит достижение точки цели. Второй способ планирования пути предполагает назначение “подцелей” на каждом этапе поиска, которая определяет направление перемещения. При выборе подцели можно учитывать не только степень приближения к целевому положению и затраты на переход, но и возможность получения локальной информации о местности, что очень важно для интеллектуальных роботов.
В заключение необходимо отметить, что рассмотренные робототехнические системы, модели ВС и методы моделирования интеллектуального поведения могут дать новый толчок в развитии при использовании новых данных из области биологии, психологии, философии и других областей наук.
2.6 Методы поиска маршрута на карте
Наиболее известными моделями внешней среды являются: клеточная, контурная и графовая.
В течении ряда лет, было предложено несколько различных подходов к проблеме нахождения путей через пространство в различных науках, где существует такая задача. Большинство их приводит к некоторому виду графа, решающему эту проблему. Здесь дано очень краткое описание наиболее общих из этих подходов.
2.6.1 Методы пересечения линий
Это - общий подход к проблеме, когда данные состоят из геометрических объектов, и мы имеем непрерывный тип местности. То есть все объекты - абсолютные препятствия в смысле, что через них нельзя пройти, а вся местность, незанятая объектом, рассматривается свободной, без изменения в скорости транспортного средства или других параметров. В этом случае Евклидово расстояние самый короткий путь - также самый быстрый путь. Основная идея в следующем: сначала создайте выпуклую оболочку из всех объектов. Углы всех многоугольников оболочки определяют набор вершин. Соедините все вершины гранями. Затем сделайте некоторую более или менее разумную фильтрацию этих граней, и в заключение найдите самый короткий допустимый путь между источником и адресатом по ряду граней, используя стандартные алгоритмы графа. Основное различие между методами в этом классе алгоритмов поиска пути - как сделать фильтрацию. Цель фильтрации удаление линий, которые возможно не принадлежат самому короткому пути и поэтому резко уменьшают число путей, которые необходимо исследовать. На первом шаге надо обычно удалить грани, которые (геометрически) пересекают любую другую оболочку, то есть те грани, которые прошли бы через препятствие. Затем различные правила, основанные на 'норме расстояния', которые применяются, чтобы удалить слишком далеко идущие пути. В заключение, много алгоритмов используют некоторую эвристику, чтобы удалить дополнительные маловероятные грани, часто игнорируя требование о нахождении точных решений в каждом случае и получении взамен большого уменьшения в числе граней
Эти методы, к сожалению, не подходят для нашей проблемы, и из-за их непрерывной природы, и из-за их неспособности обрабатывать растровые данные. Конечно, можно было бы преобразовать каждый растровый пиксел к многоугольнику, т. е. определенному числу 'линий', которые получаются простым чередованием. Есть также способы с не непрерывной местностью, но при этом быстро увеличивается размерность графа, особенно для сложных сред.
2.6.2 Методы потенциала
Другая идея состоит в том, чтобы определить некоторый сорт 'поверхности стоимости' и следовать за локальным направлением градиента, то есть 'самого метод крутого спуска'. Однако, хотя основная идея абсолютна, проста, обработать случай локального минимума - не так просто. Рассмотрим, например реку, которая естественно течет в направлении отрицательного градиента высоты местности. В природе, это создает озера и водоемы вокруг локального минимума.
В соответствии с методом потенциалов прокладка трассы точечного робота в заданную цель осуществляется за счет действующих на него потенциальных сил двух типов: силы ![]() притяжения к цели и сил
притяжения к цели и сил  отталкивания от границ препятствий. Для создания поля этих сил искусственно формируются потенциалы
отталкивания от границ препятствий. Для создания поля этих сил искусственно формируются потенциалы  такие, что
такие, что ![]() . Силу притяжения к цели
. Силу притяжения к цели ![]() можно, например задать в следующем виде:
можно, например задать в следующем виде: ![]() , тогда потенциал будет
, тогда потенциал будет  . Для задания потенциалов
. Для задания потенциалов ![]() препятствия аппроксимируют окружностями и формируют
препятствия аппроксимируют окружностями и формируют ![]() таким образом, чтобы
таким образом, чтобы ![]() - сила отталкивания от i-го препятствия увеличивалась по определенному закону, например экспоненциальному, по мере приближения к центру окружности. Таким образом, результирующее движение робота в сформированном поле потенциалов сил отталкивания и притяжения можно описать дифференциальным уравнением:
- сила отталкивания от i-го препятствия увеличивалась по определенному закону, например экспоненциальному, по мере приближения к центру окружности. Таким образом, результирующее движение робота в сформированном поле потенциалов сил отталкивания и притяжения можно описать дифференциальным уравнением:
![]()


Первое уравнение отражает перемещение материальной точки в поле потенциальных сил, а второе соответствует методу наискорейшего спуска. Недостатком данного метода является “застревание” робота в локальных минимумах потенциального поля. Методы для обнаружения и обработки таких частных случаев могли бы возможно быть разработаны и использоваться в практическом поиске пути.
2.6.3 Методы на взвешенном графе
Хотя они подобны методам пересечения линий используют конечный характер поиска на графе, эти методы используют радикально другой метод, и в смысле подхода к построению графа поиска. Основная идея состоит в том, чтобы разделить пространство на дискретные области, называемые ячейками, и ограничить перемещения от заданной ячейки до смежных, которые могут быть непосредственно достигнуты из заданной ячейки. Ориентированный граф строится следующим образом. Ячейки интерпретируются как вершины графа, а возможные перемещения к соседним ячейкам - как направленные ребра между вершинами. Функция веса определена стоимостью каждого ребра, т. е. некоторыми затратами перемещения по ребру, определенными при постановки задачи (время, длина, затраты энергии, безопасность и т. п.). Способы разбиения пространства, определения смежных вершин и весовых функций ребер могут отличаться между отличаться друг от друга в различных методах и алгоритмах. Один из методов, основанный на этом подходе, рассматривается ниже. Выбор разбиения пространства организован так, чтобы оно совпало с растровым характером данных, что делает эту модель очень гибкой и эффективной.
2.6.4 Другие методы
Существуют и другие методы нахождения маршрута. Например R. Kimmel, A. Amir и A. M. Bruckstein использовали двумерную функцию, чтобы проследить эволюцию 'равно расположенных кривых' на поверхности, и из этого получить схему, нахождения самых коротких путей на многих поверхностях. Различные эвристические подходы также были предложены, например crash-and-turn алгоритм. Практически эти методы сами по себе ведут себя далеко не оптимально на не очень простой местности, имеющие склонность иметь ситуации 'блокирования', и нельзя часто гарантировать, что путь будет найден вообще! Однако, эвристика может быть очень хорошей идеей для ускорения более 'исчерпывающих' методов основанных на графах; особенно, если требование полной гарантии оптимальности может быть опущено.
3 ПРОЕКТИРОВАНИЕ УСТРОЙСТВА УПРАВЛЕНИЯ МОБИЛЬНЫМ РОБОТОМ
3.1 Существующие аналоги транспортной робототехники
На рынке программного обеспечения существует множество продуктов, предназначенных для транспортных роботов и беспилотных ТС.
Каждый из них уникален, но по-своему решает одну задачу «автоматизация транспортных средств». Рассмотрим следующие примеры подобных ТС:
- Автопилот «Google».
- «Охранный робот Трал Патруль».
«Google» представала миру собственный автомобиль с автопилотом, который может развозить людей по точкам, не имея при этом привычного руля, педалей, ручного переключателя скоростей и тормоза. Это последнее достижение команды Google X (см. рисунок 3.1).

Рисунок 3.1 – автомобиль «Google»
Google уже ранее демонстрировал свои разработки в области автопилота для автомобилей, однако до сих пор речь шла о переоснащении существующих моделей от компаний Toyota и Lexus. Теперь же новая версия использует уникальную специально разработанную конструкцию. Автомобиль вмещает два человека и управляется исключительно с компьютера посредством бортовых вычислительных систем и внешних сенсоров (см. рисунок 3.2).

Рисунок 3.2 – автопилот «Google + Toyota Lexus»
Предыдущая модель на базе серийного автомобиля (Jason Henry, The New York Times).
И хотя пока речь идёт лишь о прототипе, Google планирует произвести порядка 100 ранних версий автомобилей для масштабного тестирования этим летом. Эти машины, которые напоминают смесь Fiat 500 с игрушками Playmobil, поначалу будут включать поддержку ручного управления на всякий случай — по аналогии с предыдущими автопилотируемыми автомобилями компании. После обкатки машин в рамках пилотной программы в Калифорнии, Google собирается разработать более широкую программу уже с привлечением партнёров и, возможно, с коммерческими целями.
Google подчёркивает, что прототипы являются электрокарами и собраны на основе массово доступных на рынке автомобильных запчастей. Также в их производстве активно применяются пеноматериалы. Google при этом не называет конкретных партнёров проекта, указывая лишь, что уже производится сборка прототипов, но пройдёт ещё какое-то время, пока они появятся на улицах штата (см. рисунок 3.3).

Рисунок 3.3 – прототип «Google»
«Трал Патруль» предназначен для автономного движения по пешеходным дорожкам и беспроводной передачи изображения от встроенных видеокамер.
Робот состоит из колесного шасси, оснащенного электрическим приводом управляемым, системой автоматического вождения и независимой системой видеонаблюдения. Система видео вождения обеспечивает всепогодные и круглосуточные проезды без участия оператора. Во время передвижения осуществляется передача изображения от камер кругового обзора, при достижении позиции наблюдения, активизируется система слежения, наводящая поворотную камеру на объект движения. Видеоизображение от всех камер и местоположение робота на электронной карте транслируется на планшет оператора или в интернет (см. рисунок 3.4).

Рисунок 3.3 –«Триал Патруль»
· Передвижное видеонаблюдение, автоматическое наведение PTZ камеры на движение и сопровождение объекта движения.
· Удаленное видеонаблюдение на планшетном компьютере, непрерывная видеозапись встроенным видеорегистратором.
· Перемещение между позициями наблюдения без участия оператора.
· Автоматический объезд препятствий и возврат для заряда аккумуляторов.
· Время автономного патрулирования 12 часов, запас хода до 24 км
· Всесезонная и круглосуточная эксплуатация.
· Малошумный электрический привод.
Передвижное видеонаблюдение - оператор имеет возможность удаленно контролировать работу нескольких роботов посредством планшетного компьютера. Программное приложение Robot Vision отображает: текущее местоположение робота на карте объекта, изображение с видеокамер, состояние системы управления, заряд батарей. В случае оперативной необходимости возможна удаленная корректировка маршрута передвижения.
Передача видео и данных осуществляется посредством WiFi. В течение всего времени патрулирования производится запись видеоизображения от всех камер. Во время зарядки робота видеоданные могут быть скопированы на внешний жесткий диск или NAS (Network Attached Storage).
Движение по маршруту без участия оператора - колесный робот совершает перемещение между позициями наблюдения без участия оператора под управлением системы автоматического вождения. Путь движения задается однократным проездом робота под управлением оператора.
Система видео вождения позволяет роботу совершать успешные проезды в условиях неустойчивого приема сигналов спутниковой навигационной системы. Например, в условиях лесопарков или радио тени от объектов застройки. Во время автоматического перемещения робот совершает самостоятельный объезд препятствий. При истощении заряда аккумуляторных батарей или их чрезмерного охлаждения, робот автоматически возвращается для подзарядки (см. рисунок 3.5).
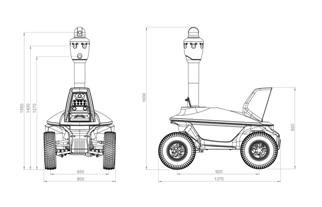
Рисунок 3.3 – «Триал Патруль»
3.2 Обоснование выбора программной среды разработки проектируемого устройства управления мобильным роботом
Построение многофункциональных интерактивных пользовательских интерфейсов. Windows Forms является технологией интеллектуальных клиентов для. NET Framework; это набор управляемых библиотек, обеспечивающих распространенные задачи приложений, например, чтение и запись в файловую систему. С помощью среды разработки типа Visual Studio можно создавать приложения Windows Forms, которые отображают информацию, запрашивают ввод от пользователей и обмениваются данными с удаленными компьютерами по сети.
В Windows Forms форма является видимой поверхностью, на которой отображается информация для пользователя. Обычно приложение Windows Forms строится путем помещения элементов управления на форму и написанием кода для реагирования на действия пользователя, такие как щелчки мыши или нажатия клавиш. Элемент управления — это отдельный элемент пользовательского интерфейса, предназначенный для отображения или ввода данных.
При выполнении пользователем какого-либо действия с формой или одним из ее элементов управления, создается событие. Приложение реагирует на эти события с помощью кода и обрабатывает события при их возникновении.
Windows Forms включает широкий набор элементов управления, которые можно добавлять на формы: текстовые поля, кнопки, раскрывающиеся списки, переключатели и даже веб-страницы. Если существующий элемент управления не удовлетворяет потребностям, в Windows Forms можно создать собственные пользовательские элементы управления с помощью класса UserControl.
В состав Windows Forms входят элементы пользовательского интерфейса с расширенными функциями, соответствующими возможностям мощных приложений, таких как Microsoft Office. Используя элементы управления ToolStrip и MenuStrip, можно создавать панели инструментов и меню, содержащие текст и рисунки, отображающие подменю и содержащие в себе другие элементы управления, такие как текстовые поля и поля с выпадающим списком.
С помощью конструктора Windows Forms Visual Studio, поддерживающего перетаскивание, можно легко создавать приложения Windows Forms: Достаточно выделить элемент управления курсором и поместить его на нужное место на форме. Конструктор предоставляет такие средства, как линии сетки и "привязка линий" для преодоления трудностей выравнивания элементов управления. И в случае использования Visual Studio или компиляции из командной строки можно использовать элементы управления FlowLayoutPanel, TableLayoutPanel и SplitContainer для создания продвинутых разметок формы за минимальное время и с минимальными усилиями.
Наконец если необходимо создать свои собственные элементы пользовательского интерфейса, пространство имен System. Drawing содержит широкий набор классов, необходимых для визуализации линий, кругов и других фигур непосредственно на форме.
3.3 Постановка задачи
Основная задача проекта – создание автоматизированного мобильного робота (МР), способного функционировать в неизвестной среде паркового типа.
Цель автоматизации:
- в теоретическом аспекте – изучение особенностей транспортной робототехники.
- в практическом аспекте – создание мобильного робота способного функционировать в неизвестной среде.
Задачи автоматизации мобильного робота:
- качественное построение модели окружающей среды
- нахождение максимально эффективного пути от точки старта до цели.
- сохранение построенной карты местности.
- перенесение построенной карты местности на реальную карту.
- самостоятельное и безопасное преодоление препятствий с минимальными затратами времени и ресурсов.
Основные функции устройства управления мобильным роботом:
- навигация, а именно построение модели окружающей среды и преобразование её в цифровой вид для ЭВМ.
- планирование глобального маршрута, осуществление поиска кратчайшего пути по заданному алгоритму.
- планирование локального манёвра, совокупность программных действий для осуществления передвижения робота, с учётом его конструкции.
- управление движением и обеспечение безопасности, т. е. перемещение робота по оптимальному пути с целью избежать столкновения с препятствием.
4 ОПИСАНИЕ ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА
Запуск программы осуществляется двойным щелчком левой кнопки мыши.
На экране появляется основная форма устройства управления мобильным роботом, которая представлена на рисунке 4.1.
Рисунок 4.1 – Основная форма
При нажатии клавиши ESC появляется форма с функциональными кнопками пользователя в правом верхнем углу (см. рисунок 4.2).
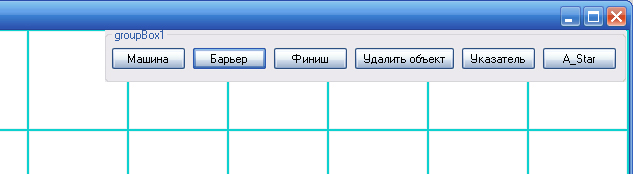
Рисунок 4.2 – Форма с функционалом пользователя
Машина – кнопка предназначена для установки стартовой точки, т. е. точки, где будет изначально располагаться робот (см. рисунок 4.3).
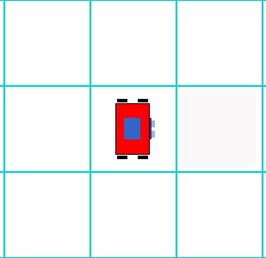
Рисунок 4.2 – Установка стартовой точки
Барьер – кнопка устанавливает препятствия, предназначена для тестирования передвижения робота (см. рисунок 4.3).
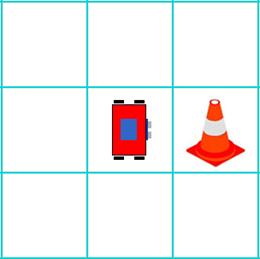
Рисунок 4.2 – Установка препятствий
Финиш – кнопка финиш устанавливает целевую точку, т. е. точку до которой должен доехать робот на карте (см. рисунок 4.3).
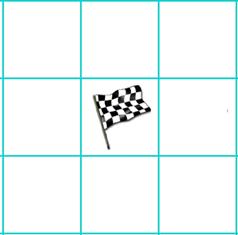
Рисунок 4.3 – Установка стартовой точки
Удалить объект – кнопка удалить объект предназначена для удаления стартовой точки (робота), точки финиша (флаг) или препятствий. Это необходимо если мы решили изменить стартовую точку, выбрать иную целевую (финиш) или при тестирование мы построили, не реальные, препятствия и решили их изъять из карты. При нажатии на эту кнопку, указатель мыши меняет форму на «корзину» как показано на рисунке 4.4.

Рисунок 4.4 – Удаление объектов с карты
Указатель – если мы нажали любую из выше перечисленных кнопок, а именно «Машина», «Барьер», «Финиш», «Удалить объект» и решили не использовать эти функции, то для отмены необходимо нажать кнопку «Указатель», для отмены выбранного функционала.
A_Star – эта кнопка активирует алгоритм поиска кратчайшего пути, т. е. осуществляется эффективный поиск пути от начальной точки (точки старта) до целевой (финиш), так же учитываются препятствия. В результате может возникнуть следующие результаты:
- Робот достиг точки цели (см. рисунок 4.5)
Рисунок 4.5 – Успешное достижение финиша
- Робот не нашёл пути до точки цели, потому что все пути тупиковые (см. рисунок 4.6).
Рисунок 4.6 – Поиск пути окончен неудачей
ЗАКЛЮЧЕНИЕ
Устройство управления мобильным роботом – это программно-технический комплекс, способный решать довольно сложные задачи. Одна из основных – управление движением МР из точки старта в заданную точку цели в неизвестной среде паркового типа.
В ходе выполнения выпускной квалификационной работы были получены следующие результаты и решены следующие задачи:
1) изучена предметная область транспортной робототехники;
2) проведен сравнительный анализ известных мобильных роботов;
3) сделана постановка задачи разработки системы управления мобильным роботом;
4) рассмотрены алгоритмы поиска кратчайших путей для различных моделей внешней среды;
5) сформулирована необходимость автоматизации системы управления мобильным роботом;
6) произведено обоснование выбора программных сред для реализации СУМР. Для разработки информационной системы были выбраны среда разработки интерфейса C# Windows Form`s;
7) спроектирована СУМР, которая включает следующие четыре подсистемы: «Подсистема навигации»; «Подсистема планирования глобального маршрута»; «Подсистема локального манёвра»; «Подсистема управления и обеспечения безопасности»;
8) разработано программное обеспечение, позволяющее управлять роботом.
На основе выполнения указанных задач была полностью достигнута основная цель работы, а именно создано устройство управления мобильным роботом.
В ходе выполнения ВКР был проведён сравнительный анализ аналогов и выявлены их недостатки, которые были учтены в процессе разработки.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1 3D news [Электронный ресурс]: http://www.3dnews. ru/821085
2 Arduino [Электронный ресурс]: http://www. arduino. cc/
3 SPM Robotics [Электронный ресурс]: http://www. smprobotics. ru/robot-mobilnogo-videonablyudeniya-tral-patrul/
4 . Алгоритм автономного исследования неизвестной внешней среды мобильным роботов. Доклады Томского государственного университета систем управления и радиоэлектроники: сб. науч. тр./под ред. . – Томск, 20с
5 Блог «Роботы и робототехника» [Электронный ресурс]: http://insiderobot. blogspot. ru/
6 , Шелестов глобального маршрута транспортного робота по реальной карте местности. Доклады Томского государственного университета систем управления и радиоэлектроники: сб. науч. тр./под ред. . – Томск, 19с.
7 , А.. Методические указания по производственной (технологической) практики, подготовке и защите ВКР для студентов направления подготовки бакалавров 230100.62 «Информатика и вычислительная техника». ОС ТУСУР 01-2013 (СТО 02069326.1.01-2013), Тусур, 2015. – 62 с
8 Корягин. Е. В., , Прокопович системы интеллектуальных мобильных устройств. Вестник Российского государсвенного университета им. И. Канта. 2008. N10
9 , , Шарапаев прототипа домашнего робота. Национальная конф. по искусственному интеллекту с международным учачстием КИИ-2006: Тр. конф.: В 3 т. М., 2006.
10 , асп. каф. АСУ, , к. т.н., доц. каф. АСУ. Моделирование процессов интеллектуального управления транспортным средством в городских условиях. Доклады Томского государственного университета систем управления и радиоэлектроники: сб. науч. тр./под ред. . – Томск, 19с.
11 Обзор информации по поиску путей. Доклады Томского государственного университета систем управления и радиоэлектроники: сб. науч. тр./под ред. . – Томск, 20с
