
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Работа на конкурс «Свободный полет»
О СТАБИЛИЗАЦИИ НЕУСТОЙЧИВЫХ КОЛЕБАНИЙ
информация о конкурсанте:
ФИО:
дата рождения: 19 сентября 1977 года
электронный адрес: *****@***ru
Введение
Задача стабилизации по состоянию линейного динамического объекта, описываемого дифференциальным уравнением вида
 , (1)
, (1)
где ![]() - состояние системы,
- состояние системы, ![]() - управление, состоит в выборе закона управления из класса обратных связей по состоянию вида
- управление, состоит в выборе закона управления из класса обратных связей по состоянию вида
![]() , (2)
, (2)
где ![]() -матрица параметров регулятора соответствующего порядка, при котором состояние
-матрица параметров регулятора соответствующего порядка, при котором состояние ![]() замкнутой системы (1), (2) является асимптотически устойчивым по Ляпунову.
замкнутой системы (1), (2) является асимптотически устойчивым по Ляпунову.
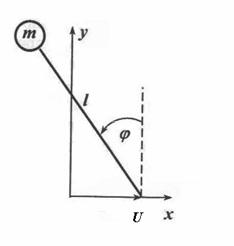
Рассмотрим однозвенный перевернутый маятник изображенный на Рисунке 1 со звеном, имеющим длину ![]() и с массой
и с массой ![]() на конце звена. Угол отклонения звена маятника от вертикали обозначим
на конце звена. Угол отклонения звена маятника от вертикали обозначим ![]() . Этот маятник не устойчив – под действием силы тяжести он упадет. Нужно решить следующую задачу - управляя смещением точки опоры в плоскости качания маятника
. Этот маятник не устойчив – под действием силы тяжести он упадет. Нужно решить следующую задачу - управляя смещением точки опоры в плоскости качания маятника ![]() привести и удержать его в вертикальном положении.
привести и удержать его в вертикальном положении.
Объект описывается уравнением:
![]() ,
,
где величина ![]() - ускорение свободного падения, или, ограничиваясь малыми углами
- ускорение свободного падения, или, ограничиваясь малыми углами ![]() :
:
![]() . (3)
. (3)
Рисунок 1.
 Известно (такие задачи решают студенты на 2 курсе), что в случае, когда обе величины
Известно (такие задачи решают студенты на 2 курсе), что в случае, когда обе величины ![]() и
и ![]() доступны измерению, уравнение (3) при выборе управления
доступны измерению, уравнение (3) при выборе управления
![]() , (4)
, (4)
![]() переходит в уравнение осциллятора
переходит в уравнение осциллятора
![]() ,
,
с устойчивым положением равновесия ![]() .
.
Для того чтобы пояснить задачу, которая решается ниже в конкурсной работе, еще раз отмечу, что мы в данной задаче измеряем угол отклонения ![]() и скорость отклонения
и скорость отклонения ![]() маятника от вертикального положения. Для того чтобы построить управление (4), стабилизирующее объект, обе эти величины нам должны быть известны.
маятника от вертикального положения. Для того чтобы построить управление (4), стабилизирующее объект, обе эти величины нам должны быть известны.
Рисунок 2.
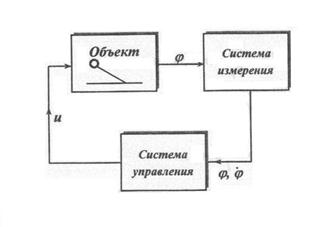 На Рисунке 2 представлена блок схема взаимодействия объекта, системы измерения и системы управления объектом. Измеренные значения
На Рисунке 2 представлена блок схема взаимодействия объекта, системы измерения и системы управления объектом. Измеренные значения ![]() и
и ![]() поступают на систему управления, которое генерирует управление по закону (4) и подает его на объект.
поступают на систему управления, которое генерирует управление по закону (4) и подает его на объект.
Теперь рассмотрим более сложную задачу. Рассмотрим плоский двухзвенный перевернутый маятник изображенный на Рисунке 3 со звеньями, имеющим одинаковую длину  и с равными массами
и с равными массами ![]() на концах звеньев.
на концах звеньев.
Рисунок 3.

Не уменьшая общности, можем положить  . Углы отклонения звеньев маятника от вертикали обозначим
. Углы отклонения звеньев маятника от вертикали обозначим ![]() и
и ![]() , а горизонтальное смещение точки опоры в плоскости качания маятника
, а горизонтальное смещение точки опоры в плоскости качания маятника ![]() .
.
Составим математическую модель плоского двухзвенного перевернутого маятника.
Обозначим ![]() координату
координату ![]() -ой массы двухзвенного перевернутого маятника. Непосредственно из Рисунка 3 находим, что
-ой массы двухзвенного перевернутого маятника. Непосредственно из Рисунка 3 находим, что
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Тогда кинетическая ![]() и потенциальная
и потенциальная ![]() энергии маятника будут иметь следующий вид:
энергии маятника будут иметь следующий вид:

![]() .
.
Ограничиваемся малыми углами ![]() ,
, ![]() ,. Введем функцию Лагранжа
,. Введем функцию Лагранжа  и напишем уравнения Лагранжа
и напишем уравнения Лагранжа ![]() , (
, (![]() ) для нашей системы:
) для нашей системы:
![]() ,
,
 .
.
Отсюда
![]() ,
,
 ,
,
или в каноническом виде управляемой линейной системы
, (5)
где
 ,
, ![]() ,
,  ,
,  .
.
Известно (такие задачи решают студенты на 4 курсе), что в случае, когда все 4 величины: углы отклонения звеньев маятника от вертикали ![]() ,
, ![]() и скорости отклонения
и скорости отклонения ![]() ,
, ![]() доступны измерению, при выборе управления в виде
доступны измерению, при выборе управления в виде
![]() , (6)
, (6)
для того чтобы привести и удержать двухзвенный маятник (оба звена) в вертикальном положении нужно, чтобы все 4 корня характеристического уравнения
![]()
имели отрицательные действительные части.
Известен критерий Рауса-Гурвица: для того, чтобы корни полинома
![]()
имели отрицательные действительные части, нужно чтобы ![]() и для матрицы
и для матрицы
все ее главные миноры были положительными ![]() .
.
В нашем случае эти условия будут иметь вид:
![]() ,
,  ,
, ![]() ,
, ![]() , (7)
, (7)
где
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Таким образом, эта задача во много раз сложнее, чем предыдущая. Мы получаем систему из 4-х уравнений, нам надо найти значения ![]() ,
, ![]() ,
, ![]() ,
, ![]() удовлетворяющие системе (7), а затем построить управление (6) стабилизирующее двухзвенный перевернутый маятник.
удовлетворяющие системе (7), а затем построить управление (6) стабилизирующее двухзвенный перевернутый маятник.
Постановка задачи
В задаче нам были доступны измерению оба угла отклонения звеньев маятника от вертикали ![]() ,
, ![]() и обе скорости отклонения
и обе скорости отклонения ![]() ,
, ![]() . А что, если мы не можем мерить все 4 величины? Что, если мы можем измерить только угол отклонения нижнего звена маятника
. А что, если мы не можем мерить все 4 величины? Что, если мы можем измерить только угол отклонения нижнего звена маятника ![]() ? Можно ли зная только
? Можно ли зная только ![]() привести и удержать оба звена маятника в вертикальном положении? В этом и состоит конкурсная работа.
привести и удержать оба звена маятника в вертикальном положении? В этом и состоит конкурсная работа.
Стабилизация по выходу
Рассмотрим управляемый объект
, (8)
![]() ,
,
где ![]() - состояние системы,
- состояние системы, ![]() - управление,
- управление, ![]() -измеряемый выход системы.
-измеряемый выход системы.
Требуется построить динамический регулятор ![]() -го порядка вида
-го порядка вида
 (9)
(9)
где  - состояние регулятора
- состояние регулятора ![]()
![]() , обеспечивающего асимптотическую устойчивость замкнутой системы (8), (9).
, обеспечивающего асимптотическую устойчивость замкнутой системы (8), (9).
Представим уравнение замкнутой системы (8), (9) при ![]() в виде
в виде
 ,
,  , (10)
, (10)
где  .
.
Тогда условие разрешимости поставленной задачи сводится к существованию квадратичной функции Ляпунова ![]() с матрицей
с матрицей ![]() такой, что по любой траектории системы выполнено неравенство
такой, что по любой траектории системы выполнено неравенство ![]() . Это условие эквивалентно следующему матричному неравенству
. Это условие эквивалентно следующему матричному неравенству
 . (11)
. (11)
Введя параметры регулятора
 (12)
(12)
представим матрицу замкнутой системы (10) в виде
 ,
,
где
![]() ,
,  ,
, ![]() .
.
Здесь символ “![]() ” обозначает единичную матрицу размера
” обозначает единичную матрицу размера ![]() .
.
Тогда неравенство (11) можно переписать в виде матричного неравенства (элементами неравенства являются матрицы)
 . (13)
. (13)
В этом неравенстве матрицы ![]() и
и ![]() неизвестны, поэтому оно не является линейным относительно совокупности переменных
неизвестны, поэтому оно не является линейным относительно совокупности переменных ![]() и
и ![]() . В настоящее время не существует алгоритмов решения таких матричных неравенств. Но в то же время известны алгоритмы для численного решения линейных матричных неравенств (например, используя пакет для инженерных расчетов Matlab). Если мы зафиксируем
. В настоящее время не существует алгоритмов решения таких матричных неравенств. Но в то же время известны алгоритмы для численного решения линейных матричных неравенств (например, используя пакет для инженерных расчетов Matlab). Если мы зафиксируем ![]() , то получим линейное матричное неравенство относительно
, то получим линейное матричное неравенство относительно ![]() . Аналогично, фиксируя
. Аналогично, фиксируя ![]() , получим линейное матричное неравенство относительно неизвестных параметров регулятора
, получим линейное матричное неравенство относительно неизвестных параметров регулятора ![]() .
.
Известно, что линейное матричное неравенство
где ![]() ,
, ![]() ,
, ![]() - заданные матрицы, причем
- заданные матрицы, причем ![]() - симметричная матрица размера (
- симметричная матрица размера (![]() ),
), ![]() и
и ![]() - прямоугольные матрицы порядков (
- прямоугольные матрицы порядков (![]() ) и (
) и (![]() ) соответственно,
) соответственно, ![]() - неизвестная прямоугольная матрица размера (
- неизвестная прямоугольная матрица размера (![]() ) разрешимо тогда и только тогда, когда
) разрешимо тогда и только тогда, когда
, ,
где столбцы матриц ![]() и
и ![]() образуют базисы ядер матриц
образуют базисы ядер матриц ![]() и
и ![]() соответственно, т. е.
соответственно, т. е. ![]() и
и ![]() .
.
Тогда обозначив
![]() ,
, ![]() и
и ![]()
получим, что разрешимость матричного неравенства (13) сводится к разрешимости системы линейных матричных неравенств относительно матриц  и
и  ,
,
 . (14)
. (14)
в которых ![]() (т. е. таких, что
(т. е. таких, что ![]() ), а столбцы матриц
), а столбцы матриц ![]() и
и ![]() образуют базисы ядер матриц
образуют базисы ядер матриц ![]() и
и ![]() соответственно.
соответственно.
Если условия (14) выполнены и такие матрицы найдены, то параметры ![]() искомого регулятора (12) находятся как решения линейного матричного неравенства (13) относительно переменной
искомого регулятора (12) находятся как решения линейного матричного неравенства (13) относительно переменной ![]() .
.
Неравенства ![]() и
и ![]() являются линейными матричными неравенствами относительно матриц
являются линейными матричными неравенствами относительно матриц ![]() и
и ![]() соответственно. Но есть еще одно условие на матрицы, а именно
соответственно. Но есть еще одно условие на матрицы, а именно  , которое не является линейным и соответственно не позволяет легко решать эту задачу специальными программными средствами. Обозначим эту задачу поиска взаимнообратных матриц
, которое не является линейным и соответственно не позволяет легко решать эту задачу специальными программными средствами. Обозначим эту задачу поиска взаимнообратных матриц ![]() и
и ![]() удовлетворяющих условию (14), как Задача 1.
удовлетворяющих условию (14), как Задача 1.
Для ее решения сначала рассмотрим другую задачу:
Задача 2: найти

где
![]() .
.
Дополнительное линейное матричное неравенство  в силу леммы Шура эквивалентно неравенствам
в силу леммы Шура эквивалентно неравенствам ![]() и
и ![]() . Поэтому в случае, когда в Задаче 2
. Поэтому в случае, когда в Задаче 2  , соответствующие матрицы
, соответствующие матрицы ![]() и
и ![]() являются также решением Задачи 1.
являются также решением Задачи 1.
Для решения Задачи 2 требуется минимизировать линейную функцию при ограничениях, одно из которых
 (15)
(15)
не является выпуклым и, следовательно, не может быть представлено в виде линейного матричного неравенства. Это обстоятельство вновь не позволяет решать Задачу 2 методами выпуклой оптимизации.
В связи с этим рассмотрим еще одну вспомогательную задачу:
Задача 3: найти

где
![]() ,
,
![]() - некоторые заданные матрицы.
- некоторые заданные матрицы.
В Задаче 3 по сравнению с Задачей 2 вместо неравенства (15) стоит линейное матричное неравенство ![]() . Представим функцию
. Представим функцию  в виде
в виде

Нетрудно видеть, что в силу неравенства ![]() функция
функция ![]() , и когда матрицы
, и когда матрицы ![]() ,
, ![]() и величина
и величина ![]() , то соответствующие решения
, то соответствующие решения ![]() и
и ![]() Задачи 3 является и решением Задачи 2.
Задачи 3 является и решением Задачи 2.
Тогда алгоритм поиска взаимнообратных матриц можно представить следующим образом:
Алгоритм.
Шаг 1) Полагаем ![]() .
.
Шаг 2) Фиксируем матрицы ![]() и
и ![]() .
.
Шаг 3) Решаем Задачу 3, например, с помощью команды mincx пакета Matlab и находим ![]() ,
, ![]() ,
, ![]() .
.
Шаг 4) Задаем ![]() и
и ![]() .
.
Шаг 5) Если разность между двумя итерациями ![]() , где
, где ![]() - некоторое заданное значение, то взаимнообратные матрицы
- некоторое заданное значение, то взаимнообратные матрицы ![]() и
и ![]() найдены и Алгоритм останавливается. Иначе полагаем
найдены и Алгоритм останавливается. Иначе полагаем  и переходим на Шаг 2).
и переходим на Шаг 2).
Сходимость алгоритма доказана ниже в Утверждении 1
Как было получено выше, математическая модель двухзвенного маятника имеет вид (5), т. е. объект описывается уравнением
 ,
,
![]() .
.
т. е. можем измерять только угол отклонения нижнего звена маятника ![]() от вертикали. Требуется синтезировать динамический регулятор третьего порядка.
от вертикали. Требуется синтезировать динамический регулятор третьего порядка.
Численное решение в Matlab заняло 6 итераций. Начальное отклонение звеньев маятника в градусах  ,
,  . Ниже приведен полученный при этом динамический регулятор (12) и полюса замкнутой системы (10) определяющие качество переходного процесса.
. Ниже приведен полученный при этом динамический регулятор (12) и полюса замкнутой системы (10) определяющие качество переходного процесса.
Число итераций | Динамический регулятор | Полюса замкнутой системы |
6 |
|
|
На Рисунке 4 приведен полученный график управления (9).
Рисунок 4.
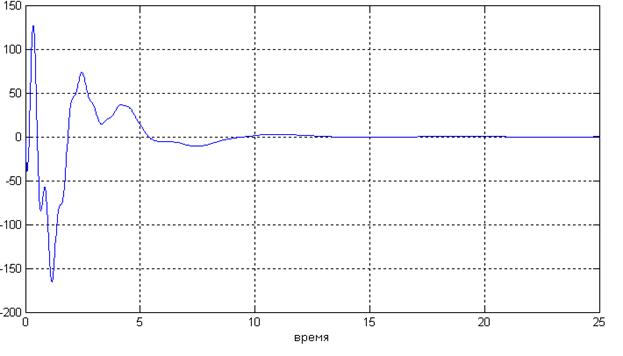
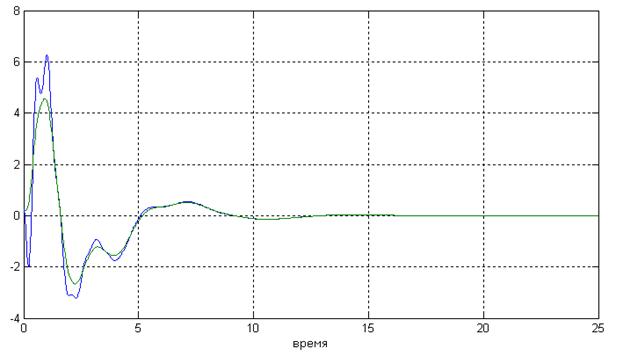
Рисунок 5 представляет собой графики углов отклонения ![]() и
и ![]() 1-го (синий) и 2-го (зеленый) звена двухзвенного маятника (в градусах)
1-го (синий) и 2-го (зеленый) звена двухзвенного маятника (в градусах)
Рисунок 5.
Для этого объекта было проведено 1000 экспериментов, с начальными матрицами ![]() и
и ![]() для алгоритма, выбираемыми при помощи генератора случайных чисел. Алгоритм не находил решение в 6 случаях (0.6%).
для алгоритма, выбираемыми при помощи генератора случайных чисел. Алгоритм не находил решение в 6 случаях (0.6%).
На Рисунке 6 представлено полученное процентное соотношение числа итераций, необходимых для поиска динамического регулятора третьего порядка алгоритмом.
Рисунок 6.
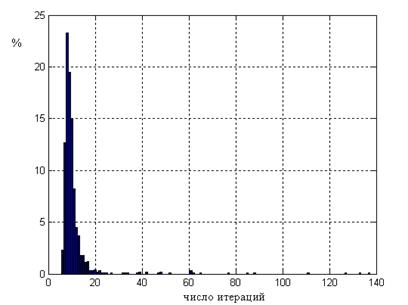
Из Рисунка 6 видно, что алгоритм находил решение за шесть итерации в 2.3% экспериментов, за семь итерации в 12.7% экспериментов, за восемь итераций 23.3% экспериментов, за девять итераций в 19.5% экспериментов, за десять итераций в 15.0% экспериментов, за одиннадцать итераций в 8.2% экспериментов, в 4.5% экспериментов при количестве итераций больше, чем 17.
Таким образом, в конкурсной работе
1. была решена задача стабилизации двухзвенного перевернутого маятника при возможности измерения только угла отклонения нижнего звена;
2. в процессе решения задачи был предложен алгоритм решения Задачи 1.
Где можно применить результаты? Развитие решения этой задачи может позволить моделировать управление, например, в электрических схемах без точного вычисления силы тока или в механических системах без точного вычисления скоростей. Датчики снимают показания в некоторые дискретные моменты времени. Для построения управления вида (6) необходимо знание скоростей отклонения ![]() ,
, ![]() . Численное вычисление производной несет в себе ошибки вычисления. Отсутствие же необходимости вычислять производную позволит улучшить качество управления и делает систему управления Рисунка 2 без ошибок порожденных ее не точным вычислением.
. Численное вычисление производной несет в себе ошибки вычисления. Отсутствие же необходимости вычислять производную позволит улучшить качество управления и делает систему управления Рисунка 2 без ошибок порожденных ее не точным вычислением.
Утверждение 1.
Для любых начальных матриц ![]() и
и ![]() числовая последовательность
числовая последовательность ![]() , генерируемая алгоритмом, является невозрастающей и существуют следующие пределы
, генерируемая алгоритмом, является невозрастающей и существуют следующие пределы
![]() ,
, ![]() ,
, ![]() .
.
Доказательство.
Рассмотрим изменение спектрального радиуса матрицы по траектории алгоритма. Обозначим ![]() .
.
Представим
![]()
в виде

Поскольку на ![]() -й итерации
-й итерации ![]() принимает минимальное при
принимает минимальное при  ,
,  , то выражение в первых квадратных скобках неположительно в силу алгоритма.
, то выражение в первых квадратных скобках неположительно в силу алгоритма.
Рассмотрим разность двух матриц, фигурирующих во вторых квадратных скобках. Используем то, что ![]() ,
, ![]() ,
, ![]() ,
, ![]() . Сделаем следующие преобразования:
. Сделаем следующие преобразования:

Поскольку из неравенства ![]() следует, что
следует, что ![]() получаем, что
получаем, что ![]() , т. е. что последовательность
, т. е. что последовательность ![]() является невозрастающей.
является невозрастающей.
Из неравенства ![]() следует, что
следует, что ![]() , следовательно, функция
, следовательно, функция ![]() и, следовательно,
и, следовательно, ![]() .
.
Последовательность ![]() является невозрастающей и ограничена снизу, следовательно, она сходится, откуда в силу непрерывности функции спектрального радиуса и следует существование указанных в теореме пределов.
является невозрастающей и ограничена снизу, следовательно, она сходится, откуда в силу непрерывности функции спектрального радиуса и следует существование указанных в теореме пределов.
Из Утверждения 1 следует, что при остановке алгоритма возможны две ситуации. Случай, когда ![]() . В этом случае
. В этом случае ![]() и матрицы
и матрицы ![]() ,
, ![]() являются решениями Задачи 1. Во втором случае, когда
являются решениями Задачи 1. Во втором случае, когда ![]() - нельзя сделать определенного вывода о разрешимости Задачи 1. В этом случае целесообразно повторить алгоритм поиска взаимнообратных матриц при других начальных условиях
- нельзя сделать определенного вывода о разрешимости Задачи 1. В этом случае целесообразно повторить алгоритм поиска взаимнообратных матриц при других начальных условиях ![]() и
и ![]() , как это обычно делают в задачах глобальной оптимизации.
, как это обычно делают в задачах глобальной оптимизации.
