
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 629.7.054.07
И. И. САВЕЛЬЕВ[1], А. О. СИНЕЛЬНИКОВ
«Полюс» им. », Москва
ВЛИЯНИЕ ТОКА НАКАЧКИ НА ВЫХОДНЫЕ ХАРАКТЕРИСТИКИ ЗЕЕМАНОВСКИХ ЛАЗЕРНЫХ ДАТЧИКОВ ВРАЩЕНИЯ
В работе теоретически и экспериментально исследовано влияние тока накачки на амплитуды выходных сигналов, частоту подставки, ширину статической зоны захвата и смещение нуля в кольцевом зеемановском лазере на чистом изотопе Ne. Показано, что снижение тока накачки приводит к уменьшению ширины статической зоны захвата и невоспроизводимости смещения нуля, а также к снижению энергопотребления датчиков. Это позволяет повысить точность зеемановских лазерных гироскопов без существенных изменений в схемотехнике и конструкции.
Введение
Зеемановские лазерные датчики вращения и гироскопы на их основе [1] обладают рядом преимуществ по сравнению с другими типами лазерных гироскопов (ЛГ), основными из которых являются отсутствие подвижных частей (монолитность конструкции) и высокая устойчивость к разъюстировкам зеркал.
Благодаря указанным преимуществам зеемановские ЛГ заняли прочные позиции в областях применения со сложными условиями эксплуатации и высоким уровнем внешних воздействующих факторов, однако по точностным параметрам и времени их непрерывной работы имеется значительное отставание от ЛГ с вибрационной частотной подставкой [2,3]. С учетом этих факторов исследования, направленные на повышение точности зеемановских лазерных датчиков, являются актуальными.
Целью работы является исследование влияния тока накачки на выходные характеристики зеемановских лазеров кольцевых (ЗЛК), определяющие точность лазерных датчиков вращения и трехосных гироскопов на их основе.
Для достижения поставленной цели в работе решаются следующие задачи: исследование влияния величины тока накачки на ширину статической зоны захвата, невоспроизводимость смещения нуля и амплитуду выходных сигналов вращения ЗЛК.
Режим работы и источники погрешности в ЗЛК
Принцип действия ЗЛГ, как и других ЛГ, основан на эффекте Саньяка. Чувствительным элементом в них является Не-Nе лазер с четырехзеркальным неплоским резонатором, на активную среду которого наложено продольное магнитное поле. Благодаря неплоскому резонатору в лазере генерируются волны с круговыми поляризациями, а в продольном магнитном поле вследствие эффекта Зеемана между встречными волнами возникает разность частот, называемая амплитудой частотной подставки. Ее величина будет определяться выражением:
(1)
где Wb – амплитуда частотной подставки, k1 – константа, зависящая от параметров активной среды, G – коэффициент усиления активной среды, H – напряженность магнитного поля, U – среднеквадратичная тепловая скорость атомов.
Однако в ЗЛК существует ряд эффектов ухудшающих их точностные характеристики, основными из которых являются захват частот встречных волн, возникающий из-за связи встречных волн через обратное рассеяние на элементах резонатора, и сдвиг смещения нуля, вызываемый дрейфом возбужденных атомов в газовом разряде (токовый дрейф). Этот сдвиг, возникающий из-за эффекта Лэнгмюра, аналогичен зеемановскому расщеплению и определяется следующим выражением:
(2)
где WT – сдвиг нуля, обусловленный токовым дрейфом, k2 – константа, зависящая от параметров активной среды, V – скорость потока возбужденных атомов.
С учетом этих негативных эффектов выходная характеристика ЛГ будет иметь следующий вид:
(3)
где Wout – выходная характеристика ЛГ, W – реальное вращение, Wb – смещение нуля за счет эффекта Зеемана (частотная подставка), Wd – дрейф нуля, обусловленный различными механизмами, в том числе WT, Wl – ширина статической зоны захвата.
Как было отмечено ранее, для вывода лазера из области захвата в датчике создается знакопеременная частотная подставка путем переключения электрического тока величиной в 0,5А в катушках невзаимного устройства, намотанных на газоразрядные промежутки, с частотой переключения 1 кГц по форме “прямоугольного меандра”. Поскольку эта частота имеет разные знаки в соседних полупериодах, то можно ее вычитать и выделять только полезный сигнал. Введение знакопеременной частотной подставки позволяет минимизировать влияние захвата, однако возникающая при этом нелинейность масштабного коэффициента и остаточные (так называемые «динамические») зоны синхронизации, в конечном счёте, определяются шириной статической зоны синхронизации. В работе [4] показано, что величина захвата зависит от усиления среды и, соответственно, от тока накачки.
Для уменьшения дрейфа нуля за счет снижения токовой составляющей в ЗЛК делают два газоразрядных промежутка (ГРП), и разрядные токи в этих промежутках направляют навстречу друг другу, что позволяет скомпенсировать их движение. При этом важна не сама величина токового дрейфа, а ее стабильность во времени как при саморазогреве датчика, так и при изменении внешних температур. Как показано в настоящей работе, снизить негативное влияние данных эффектов возможно за счет снижения тока накачки в активных ГРП.
Теоретический анализ
В теоретических расчетах, выполненных [4] Климонтовичем с соавторами, получены условия, при которых снижение тока накачки в лазере на чистом изотопе Nе должно приводить к уменьшению ширины зоны синхронизации:
(4)
![]() (5)
(5)
где m – расстройка частоты генерации относительно центра линии усиления, gab – однородная ширина линии излучения, b = t-r, t и r – коэффициенты, описывающие поляризуемость активной среды, a и b – комплексные коэффициенты, описывающие поляризуемость активной среды при t и r = 0. Для ЗЛК работающего на чистом изотопе Nе20 при следующих значениях параметров m = 192 МГц, gab= 300 МГц, a = 0,46 , b = 0,23, b = 0,4 [5] данные условия выполняются.
Величина токового дрейфа для ЗЛК с двумя активными ГРП будет определяться следующим выражением [3]:
(6)
которое при G1,2 = mip , V1,2 = nip , U1,2 = U0(1 + yip) примет следующий вид:
 |
(7)
где – ip = 0,5(i1 + i2) средний ток накачки в ГРП, Dip =0,5(i1 - i2) разница токов в ГРП, m, n, y – константы пропорциональности.
Представленное выражение демонстрирует пропорциональную зависимость токовой составляющей дрейфа смещения нуля и усиления активной среды от тока накачки в ГРП, следовательно, его снижение должно также привести к уменьшению дрейфа. Однако падение усиления неизбежно приведет к уменьшению амплитуды выходных сигналов.
Экспериментальные результаты
На 200 зеемановских лазерных датчиках типа ЭК-104С в нормальных климатических условиях было проведено исследование влияния тока накачки на ширину статической зоны захвата при двух токах накачки: ip = 1,6 мА и ip = 1,2 мА. Результаты измерения представлены на рисунке 1 в виде 2-х диаграмм распределений полуширины зоны захвата с шагом 10 Гц.
Видно, что снижение тока накачки на 25% привело к уменьшению ширины зоны захвата в среднем на 20 Гц, что составило 17%. Поскольку ЗЛК работает при больших усилениях над потерями, уменьшение захвата может быть объяснено только нелинейными эффектами. В частности, такие эффекты могут происходить как в активной среде [4], так и на диэлектрических зеркалах резонатора КЛ. К последним эффектам относится образование дифракционной решетки на поверхности зеркал под действием поля стоячей волны, что создает дополнительное обратное рассеяние и приводит к увеличению зоны захвата [6].
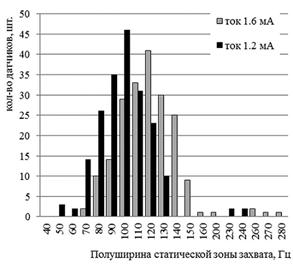
Рис. 1. Диаграммы распределений полуширины статических зон захвата в ЗЛК при 2-х токах накачки
Из рисунка 2 видно, что при длительной работе ЗЛК внутри зоны захвата происходит увеличение ее ширины, причем величина этого увеличения и скорость возрастают с ростом тока накачки.
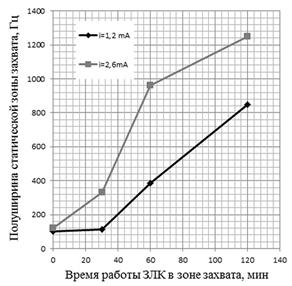
Рис. 2. Изменение полуширины статической зоны захвата от времени работы ЗЛК в зоне захвата при двух токах накачки
Поскольку для существенного воздействия этого эффекта на ширину зоны захвата требуется довольно длительное время нахождения в зоне, что не характерно для типичного режима работы ЗЛК, то можно сделать вывод, что влияние тока накачки на ширину зоны захвата в основном обусловлено нелинейными эффектами, происходящими на активной среде.
На рисунке 3 представлены статистические распределения, показывающие максимальную величину выбега смещения нуля лазерных датчиков ЭК-104С за 1 час работы за счет саморазогрева в диапазоне рабочих температур для двух токов накачки. Средняя величина выбега смещения нуля, обусловленная токовым дрейфом, при токе накачки 1,6 мА составила 2,3 мин/мин, а при его снижении до 1,2 мА – 1,75 мин/мин. Таким образом, снижение тока накачки в ГРП на 25% привело к пропорциональному снижению выбега смещения нуля, что позволило повысить его воспроизводимость и уменьшить нестабильность.
Рис. 3. Максимальное изменение смещения нуля ЗЛК за час работы в различных климатических условиях при двух токах накачки: а) минус 55°С; б) НКУ; в) 75°С
Средняя величина амплитуды сигналов вращения при токе 1,6 мА, составляющая на начало эксперимента 1,3 В, а после снижения тока упала до 0,9 В, что ниже нормы. Но благодаря достаточному запасу усиления и более точной юстировке фотоприемников ее удалость увеличить. На данный момент амплитуда выходных сигналов датчиков ЭК-104С, работающих при токе накачки 1,2 мА, составляет в среднем 1,5 В.
Заключение
В работе показано, что в ЗЛК снижение тока накачки в ГРП приводит к уменьшению ширины статической зоны захвата и величины выбега смещения нуля.
В датчиках ЭК-104С и трехосных ЛГ МТ-401 осуществлен переход на пониженный ток накачки 1,2 мА, что позволило уменьшить энергопотребление датчиков ЭК-104С на 16% и повысить их точность, в частности: уменьшить ширину статической зоны захвата на 17%; снизить величину выбега смещения нуля с 0,5-1,0 º/ч до 0,2-0,3 º/ч и как следствие невоспроизводимость смещения нуля с 1-3 º/ч до 0,3-0,9 º/ч.
Дальнейшее снижение тока в имеющийся конструкции ограничено устойчивостью разряда, поскольку граница устойчивости обычно лежит в диапазоне 0,6-0,9 мА, поэтому с учетом технологического запаса уровень 1,2 мА на сегодняшний день является оптимальным.
ЛИТЕРАТУРА
1. , , Кольцевые газовые лазеры с магнитооптическим управлением в лазерной гироскопии // Квантовая электроника. – 20, №2(512). - С.171-179.
2. , , Прецизионный лазерный гироскоп для автономной инерциальной навигации // Квантовая электроника, №1(511). - С.78-88.
3. Aronovitz F., Fundamentals of the ring laser gyro, Optical Gyros and their Application, 1999. RTO AG-339. рр.
4. , , Волновые и флуктуационные процессы в лазерах. Монография под ред. - М.: “Наука”, 1974.
5. , , Влияние давления на эффект Зеемана в кольцевом газовом лазере // Квантовая электроника. – 19, № 6.
6. , , Влияние взаимодействия излучения с веществом отражателей на характеристики кольцевого лазера // Квантовая электроника. -1978. -5, №3.
Текст доклада согласован с научным руководителем
[1] Кандидат физико-математических наук, начальник отдела,
