
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 656.2
В. Ю.ЛАЗАРЕВ, Д. Ю.ЛАРИОНОВ, Р. В. ШАЛЫМОВ [1]
(Санкт-Петербургский государственный электротехнический университет «ЛЭТИ»)
Интегрированная система ориентации и навигации для задач диагностики рельсового пути.
Приведена концепция построения комплексной системы измерения, как геометрических параметров рельсового пути (включая ширину и рихтовки), так и коротких неровностей поверхностей катания рельсов. Рассмотрены особенности построения системы навигации на рельсовом пути. Особое внимание уделено вопросам использования оптических профилометров в составе системы диагностики рельсового пути и совместной обработке их показаний с данными от бесплатформенной инерциальной навигационной системы. Приводятся результаты экспериментальных проездов системы в составе путеизмерительной тележки.
Введение
В настоящее время наблюдается тенденция увеличения использования железнодорожного транспорта, в связи с этим увеличиваются скоростные показатели движения грузовых и пассажирских поездов, а также растет плотность их движения. Очевидно, что современные условия эксплуатации требуют более тщательного контроля состояния рельсового пути. Именно от своевременного обнаружения и устранения неполадок зависит безопасность, а также возможность скоростного движения поездов (300км/ч). Для этих целей в настоящее время используется ряд технических средств, таких как путеизмерительные вагоны и ручные средства измерения, но оперативный контроль качества железнодорожного пути ими затруднен.
Одним из возможных решений этой проблемы является размещение, как на вагонах-дефектоскопах, так и на непрерывно курсирующих пассажирских и грузовых поездах Малогабаритной Инерциальной Системы Диагностики Рельсового Пути (МИСД РП) – разработки кафедры лазерных измерительных и навигационных систем СПбГЭТУ «ЛЭТИ» [1, 2].
Настоящая работа посвящена разработке устройства для измерения горизонтальных неровностей пути с использованием (МИСД РП).
Влияние месторасположения ИНС в составе системы.
На рис.1 приведены возможные места установки БИНС и реализованные в отечественных ПВ (скорости движения до 160 км/ч). С точки зрения эффективного использования БИНС в задаче диагностики геометрических параметров рельсового пути на скоростях 160 км/ч, в том числе с точки зрения оптимальности конструкторских решений, является вариант а (ИНТЕГРАЛ, ГК ТВЕМА) − использование моноблочной конструкции, включающей в себя БИНС и профилографы (шаблон), монтируемой на подрессоренную часть ходовой тележки.
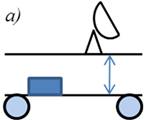
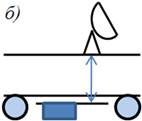
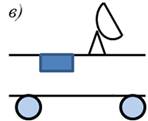
Рис.1. Варианты расположения ИНС на российских ПВ.
 Недостатком варианта б (ЭРА, НПЦ ИНФОТРАНС) является сложность обеспечения необходимой жесткости дополнительной плиты, на которой также смонтированы профилографы (шаблон). Однако достоинство такого подхода – более комфортные условия для эксплуатации БИНС, так как благодаря дополнительной подвеске, колебания платформы находятся в более низкочастотной области по сравнению с колебаниями рамы тележки (вариант а). Недостатком варианта в (ЦНИИ-4МДМ, ПИК ПРОГРЕСС) является то, что при измерении просадок высокочастотные составляющие движения точек контакта «колесо-рельс» должны обеспечиваться системой датчиков Б−К, представляющих собой тросик с системой его натяжения через ролик и контролем изменения его длины (рис. 2). Также, в случае установки БИНС на кузове вагона, она будет определять движение семнадцатиметровой хорды (базы вагона) по рельсовому пути. Таким образом, измеряется не истинное положение пути в плане и в профиле, которое интересует службы пути, а траектория движения базы вагона.
Недостатком варианта б (ЭРА, НПЦ ИНФОТРАНС) является сложность обеспечения необходимой жесткости дополнительной плиты, на которой также смонтированы профилографы (шаблон). Однако достоинство такого подхода – более комфортные условия для эксплуатации БИНС, так как благодаря дополнительной подвеске, колебания платформы находятся в более низкочастотной области по сравнению с колебаниями рамы тележки (вариант а). Недостатком варианта в (ЦНИИ-4МДМ, ПИК ПРОГРЕСС) является то, что при измерении просадок высокочастотные составляющие движения точек контакта «колесо-рельс» должны обеспечиваться системой датчиков Б−К, представляющих собой тросик с системой его натяжения через ролик и контролем изменения его длины (рис. 2). Также, в случае установки БИНС на кузове вагона, она будет определять движение семнадцатиметровой хорды (базы вагона) по рельсовому пути. Таким образом, измеряется не истинное положение пути в плане и в профиле, которое интересует службы пути, а траектория движения базы вагона.
Следует отметить, что аналогичной логики стоит придерживаться и для реализации решений на скоростях до 300 км/ч (жесткость конструкции в этом случае приобретает еще большее значение) и обеспечения требований стандарта [1] к точностям измерения таких геометрических параметров как: продольный уровень, поперечный уровень, изгиб, кривизна, профиль и т. д.. В этом случае становится необходимым объединение в моноблочной конструкции БИНС и оптических сканеров внутренних профилей головок (ОСВПГ) рельсовых нитей. При такой конфигурации БИНС, как построитель опорной системы координат, сможет давать как информацию о средней линии пути, так и углы поворота моноблочной конструкции, а значит и углы, под которыми ОСВПГ смотрят на рельсы.
Инерциальная система мониторинга рельсового пути
ИСМРП (Рис.3) в полной комплектации предназначена для определения основных геометрических параметров пути, а также таких дефектов поверхности катания рельсов, включает в себя две подсистемы – 1)подсистема измерения геометрических параметров (ПИГП); 2) подсистема диагностики коротких неровностей (ПДКН); и состоит из:
· четырех инерциальных ММ, расположенных на буксах колесных пар тележки вагона;
· БИНС, закрепленной под кузовом вагона;
· ПА СНС;
· датчика пути (одометра);
· двух лазерных сканеров (профилометров);
· 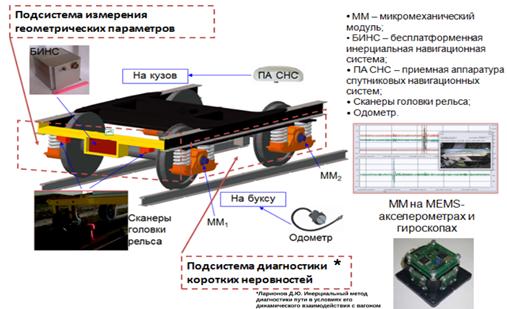
четырех датчиков перемещений (ДП), позволяющих учитывать рассогласование показаний ММ и БИНС, вызванное различием мест их установки.
Рис.3 Малогабаритная инерциальная система диагностики рельсового пути
О результатах разработки ПДКН был сделан доклад в 2012 году [6].
Основа (ПИГП) представляет собой моноблочную конструкцию, содержащая в своем составе БИНС и профилометр на базе двух лазерных сканеров. Моноблок предполагает установку на ходовой тележке несущей подвижной единицы. Одной из важнейших задач в области путеизмерений является привязка результатов диагностики к пространственным координатам (месту на рельсовом пути). Решение подобной задачи требует наличия в составе ПИГП, помимо БИНС, еще двух подсистем: приемной аппаратуры спутниковых навигационных систем (GLONASS, GPS, etc.) и датчика пути (одометра).
Для обеспечения динамических характеристик в качестве чувствительных элементов БИНС используются волоконно-оптические гироскопы (ВОГ). Требования к диапазону измерений ВОГ определяются минимальной скоростью движения (5 км/ч для РЖД) и при движении по кривой минимального радиуса могут быть получены как
 .
.
БИНС на ВОГ обладают существенно лучшими возможностями к измерениям в условиях активных внешних механических воздействий (вибрации и удары на тележке вагона). В процессе испытаний ВОГ была выявлена зависимость их показаний от действующего магнитного поля, поэтому была уточнена модель погрешностей ВОГ – чувствительность к магнитному полю и в состав БИНС были введены магнитометры для аналитической компенсации этой зависимости.
Особенностью построения интегрированной системы ориентации и навигации (ИСОН) является оценка погрешности датчика пути (одометра). Для этого реализуется алгоритм, приведенный на рис. 11, позволяющий оценить коэффициент скольжения m:

В зависимости от качества сигналов СНС может быть реализовано два варианта ИСОН. Коррекция одометра осуществляется по координатам, если сигнал СНС достоверен и по скоростям – если нет.
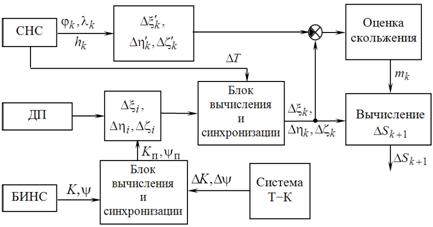
Рисунок. 11. Алгоритм ИСОН
Алгоритм определения параметров геометрии рельсового пути
Предлагаемый инерциальный метод состоит в следующем. Полученные от лазерных сканеров внутренние профили рельсов обрабатываются, определяются точки на уровне 13 мм от поверхности катания рельса. На рисунке 3.12 приведен схематический вид расположения датчиков системы с обозначениями, используемыми в дальнейшем.
Рисунок 4. Расположение датчиков МИСД РП-М.
T – верхняя точка рельса; P – точка контакта рельса и колеса;![]() ,
, ![]() ,
, ![]() ,
, ![]() – декартовы координаты точки T по показаниям сканера 1 (для левого по ходу движения рельса) и сканера 2 (для правого рельса), соответственно;
– декартовы координаты точки T по показаниям сканера 1 (для левого по ходу движения рельса) и сканера 2 (для правого рельса), соответственно; ![]() ,
, ![]() ,
, ![]() ,
, ![]() – декартовы координаты точки P по показаниям сканера 1 (для левого по ходу движения рельса) и сканера 2 (для правого рельса), соответственно; L – расстояние между лазерными сканерами;
– декартовы координаты точки P по показаниям сканера 1 (для левого по ходу движения рельса) и сканера 2 (для правого рельса), соответственно; L – расстояние между лазерными сканерами;
H – высота БИНС по отношению к рельсовому пути. Лазерный сканер измеряет расстояние до головки рельса (точки T и P). БИНС закреплена в центре балки, установленной на ходовой тележке, и измеряет положение (угол) рамы тележки.
Для измерения ширины рельсового пути используются только показания лазерных сканеров. Ширина (![]() ) является расстоянием между левой и правой точками P. Это расстояние вычисляется по формуле (1.1):
) является расстоянием между левой и правой точками P. Это расстояние вычисляется по формуле (1.1):
![]() , (1.1)
, (1.1)
где ![]() – ширина рельсовой колеи;
– ширина рельсовой колеи; ![]() ,
, ![]() – глобальные координаты x точек P левого и правого рельсов, соответственно, получаемые пересчетом координат
– глобальные координаты x точек P левого и правого рельсов, соответственно, получаемые пересчетом координат ![]() ,
, ![]() по показаниям БИНС (разворот из текущего положения тележки в центральное).
по показаниям БИНС (разворот из текущего положения тележки в центральное).
Схема измерения уровня, с соответствующими обозначениями приведена на рисунке 5.
Рисунок 5 – Схема измерения уровня
C – уровень; ![]() – угол крена рамы тележки;
– угол крена рамы тележки; ![]() ,
, ![]() – глобальные координаты центра рельсовой колеи;
– глобальные координаты центра рельсовой колеи; ![]() ,
, ![]() – глобальные координаты центра БИНС
– глобальные координаты центра БИНС
Уровнем является расстояние по вертикали между точками T или P головок левого и правого рельсов. Этот геометрический параметр вычисляется с использованием данных от лазерных сканеров и угла крена от БИНС в соответствии с выражением (1.2):
![]() , (1.2)
, (1.2)
где C – уровень; а координаты с рисунка 5:  ,
, ![]() .
.
Тогда, с учетом малости углов и полученной ранее формулы (1.1), выражение (1.2) примет вид (1.3):
![]() (1.3)
(1.3)
Определение рихтовки рельсов по показаниям датчиков системы определяется в соответствии с приведенными ниже формулами (1.4) – (1.6).
Изменение географических координат по показаниям ИНС (курсовой канал) и датчика пути (одометра):
 ;
;  , (1.4)
, (1.4)
где ΔN, ΔE – изменение географических координат (северной и восточной, соответственно) центра БИНС; ![]() – дискрет одометра;
– дискрет одометра; ![]() – угол курса по показаниям БИНС;
– угол курса по показаниям БИНС; ![]() – количество импульсов одометра на дистанции пути λ; λ – длина волны неровности. Тогда можно определить рихтовку средней точки пути:
– количество импульсов одометра на дистанции пути λ; λ – длина волны неровности. Тогда можно определить рихтовку средней точки пути:
 , (1.5)
, (1.5)
где ![]() – рихтовка средней точки пути (
– рихтовка средней точки пути (![]() ,
, ![]() на рисунке 5). В результате рихтовка правого и левого рельсов определяется по формулам:
на рисунке 5). В результате рихтовка правого и левого рельсов определяется по формулам:
![]() ;
;  , (1.6)
, (1.6)
где ![]() ,
, ![]() – рихтовка левого и правого рельсов, соответственно. При этом сумма рихтовок соответствует выражению (1.7):
– рихтовка левого и правого рельсов, соответственно. При этом сумма рихтовок соответствует выражению (1.7):
![]() . (1.7)
. (1.7)
Перекосы вычисляются как разность между двумя поперечными уровнями на равных интервалах. Таким образом, поворот получается из сравнения ранее измеренных данных и текущих в соответствии с выражением (1.8):
![]() , (1.8)
, (1.8)
где ![]() (n) – перекос на текущем импульсе одометра n;
(n) – перекос на текущем импульсе одометра n; ![]() – количество импульсов одометра на дистанции пути l; l – дистанция определения перекоса (3 метра).
– количество импульсов одометра на дистанции пути l; l – дистанция определения перекоса (3 метра).
Апробация алгоритма
На этом этапе разработки оптико-инерциальной системы диагностики рельсового пути был создан макет, имеющий целью проведение испытаний системы и демонстрацию ее возможностей потенциальным заказчикам. Фото макета представлено на рис. 6.
Тележка прошла испытания в Корее(г. Карлсруэ). Состав ОИСДРП представлен на рисунке а.
На рис. 6 б и в – представлены фото макета с испытаний в Южной Корее. На рис. 6 б – видна подсвеченная лазерным профилометром кромка рельса. Внешний вид ПО макета представлен на рис.7.
а)


б) в)
Рис.6 Макет Оптико-инерциальной системы диагностики рельсового пути.
Внешний вид ПО макета представлен на рис.7.
![]()
![]()
![]()
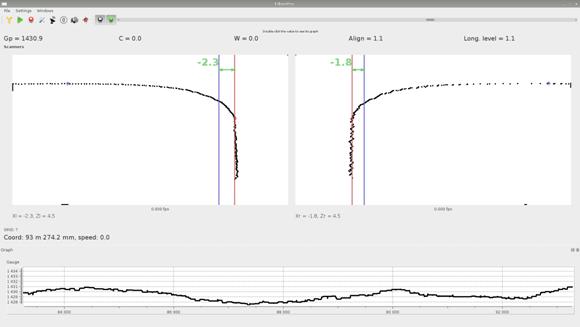
Рис.7. ПО макета Оптико-Инерциальной Системы Диагностики Рельсового Пути.
Заключение
Таким образом, в работе был произведен анализ измерительных схем путеизмерительных вагонов, он показал целесообразность установки моноблока с БИНС и профилометром непосредственной на раму тележки. А так же показана возможность построения БИНС на базе ВОГ для задач диагностики рельсового пути. При этом для эффективной работы ВОГ в составе БИНС в условиях железной дороги, необходима установка магнитометров, для компенсации погрешностей, вызванных магнитными полями. Приведен алгоритм определения параметров геометрии рельсового пути при совместной обработке данных профилометров, БИНС и одометра.
ЛИТЕРАТУРА
1. Боронахин, А. М. Малогабаритная интегрированная система диагностики рельсового пути // Гироскопия и навигация, №1 (64) // , , . – С-Петербург: ЦНИИ «Электроприбор», 2009. - С. 63 – 74.
2. Инерциальная система мониторинга рельсового пути // [и др.] // Изв. СПбГЭТУ «ЛЭТИ». 2011. Вып. 10. С 84 – 91.
Текст доклада согласован с научным руководителем
Научный руководитель: СПбГЭТУ «ЛЭТИ» каф. ЛИНС, д. т.н., проф.,
Стундент СПбГЭТУ «ЛЭТИ» / /
[1] Научный руководитель д. т.н., проф. .
