Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ
ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ЦЕНТРАЛЬНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ РОБОТОТЕХНИКИ И ТЕХНИЧЕСКОЙ КИБЕРНЕТИКИ
КАФЕДРА ТЕОРИИ МЕХАНИЗМОВ И МАШИН
"К ЗАЩИТЕ"
_______________________
(подпись преподавателя)
"___"___________________
Кулисный механизм
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОМУ ПРОЕКТУ
TMM
Разработал:
ст. гр. 3174/1______________________________________________()
Проверил:
Преподаватель_____________________________________________()
Санкт-Петербург
2007 год
Содержание
· Структурный анализ механизма 3
· Геометрический анализ механизма 4
· Кинематический анализ кулисного механизма 6
· Статический расчет механизма 9
· Кинетостатический расчет механизма 12
· Динамический расчет механизма 18
· Переходные процессы 28
· Улучшение характеристик 29
· Определение параметров маховика__________________________________33
Структурный анализ механизма
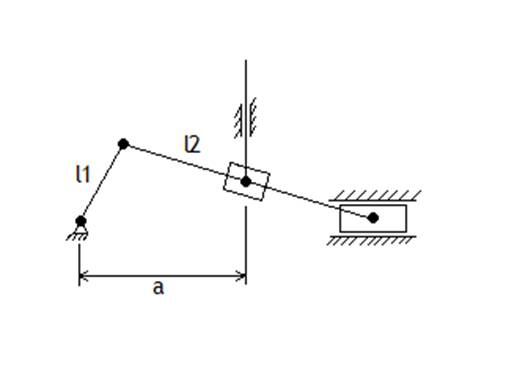
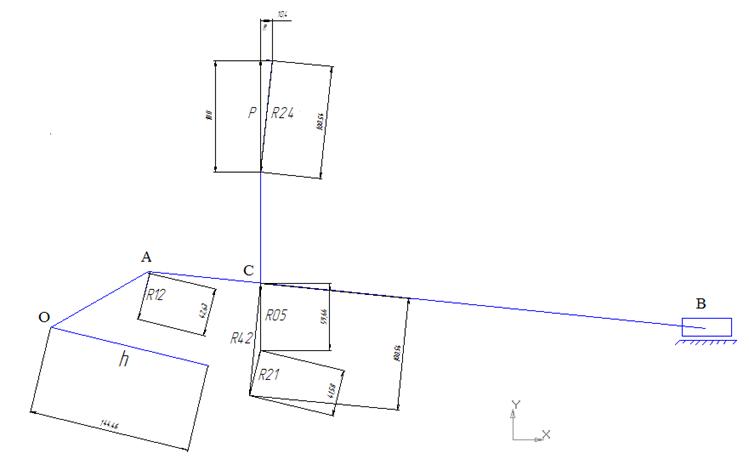
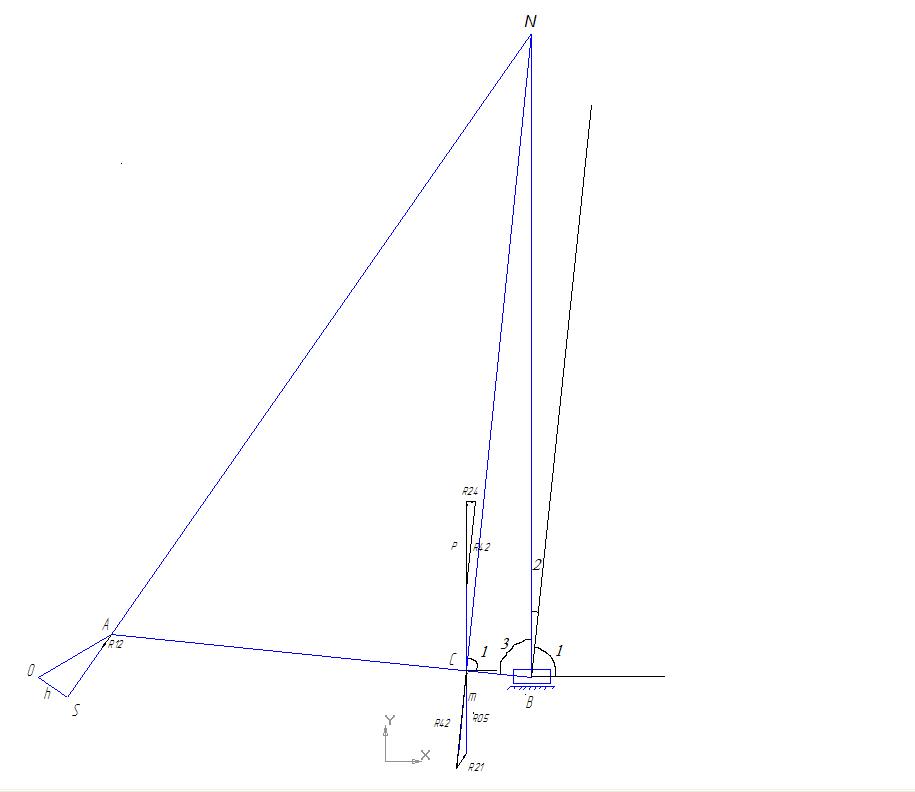
Структурная схема механизма ножа сварочного аппарата:
L1 – кривошип, L2 - кулиса
L1 | L2 | a | w |
1м | 4 м | 2 м | 10 1/c |
2).Граф механизма ножа сварочного аппарата:
Целью структурного анализа является разбиение механизма на простые структурные группы
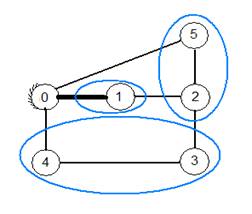
3).Число подвижных звенье механизма N=5.
Количество кинематических пар механизма P=7.
Суммарное число подвижностей всех кинематических пар S=7.
4).Число независимых контуров графа K=P-N=2.
5).Степень подвижности механизма W=S-3K=7-6=1. Механизм нормальный, т. к. n=W.
6).Структурный граф механизма:
 Мы видим, что это одноподвижный механизм. Он является нормальным, т. к. число степеней его подвижности совпадает с числом его двигателей, следовательно его можно разбить на простые структурные группы.
Мы видим, что это одноподвижный механизм. Он является нормальным, т. к. число степеней его подвижности совпадает с числом его двигателей, следовательно его можно разбить на простые структурные группы.
Геометрический анализ механизма
Задача геометрического анализа
Целью геометрического анализа является определение функций положения механизма, т. е. зависимостей выходных параметров (координат некоторых точек, углов поворота звеньев) от входных обобщенных координат механизма. Определение этих зависимостей составляет прямую задачу геометрического анализа. Обратная задача: определение значения входных параметров по заданным выходным.
Составление уравнений геометрического анализа
Группа 1 :

Группа 2 :

Решение уравнений геометрического анализа в общем виде
Найдем неизвестные величины, двумя способами, убедимся, что графики совпали.
Определение групповых координат:
Из первой системы найдем:



![]()
![]()
![]()
Из второй системы имеем:
![]()
![]()
![]()
![]()
![]()
![]()


 +
+  +
+
![]()
Найдем крайние положения:
Найдем углы q* и q**, соответствующие крайним положениям механизма:
q* = 1.1,
q** =5.1
В этих положениях скорость звена 4 равна нулю.
![]()
Статический расчет механизма
Задачей статического расчета является определение реакций в кинематических парах рычажного механизма и уравновешивающего момента Q по заданной рабочей нагрузке.
 Проведем статический расчет механизма при
Проведем статический расчет механизма при ![]() .
.
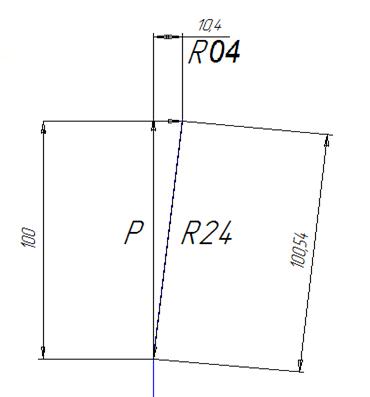
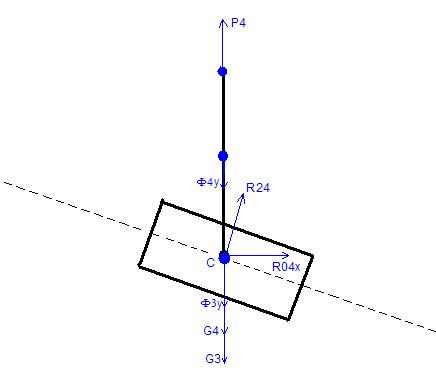
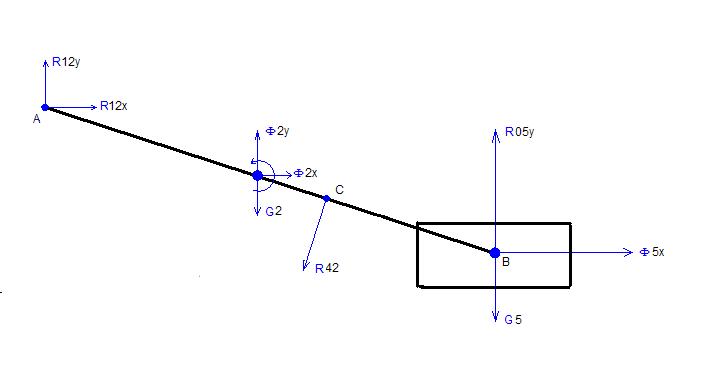
Условие равновесия звена 4:
Дано: P, φ
R04 = P * sin(φ - 3π/2)
R24 = 
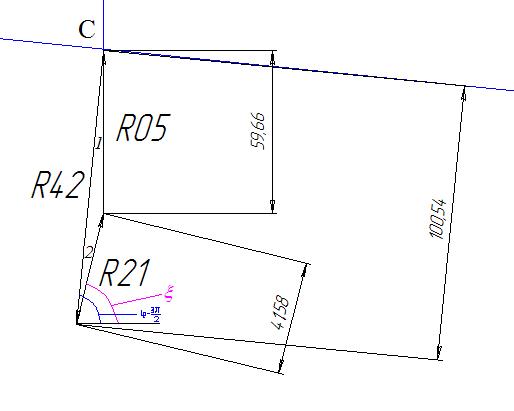
Условие равновесия звена 2:
Дано: R24
![]()
![]()
![]()
![]()
, где углы 1 и 2:
![]()
![]()
угол ![]() будет выведен позже.
будет выведен позже.
Условие равновесия звена 1:
Найдем h:
Рассмотрим треугольник CNB:
![]() ,
, ![]() =>
=> ![]()
CB – известно, CN = CB*tg ![]()
AC нам также известно => можно найти ![]() : tg
: tg![]() NAC=
NAC=![]() =>
=> ![]() NAC = arctg(
NAC = arctg(![]() )
)
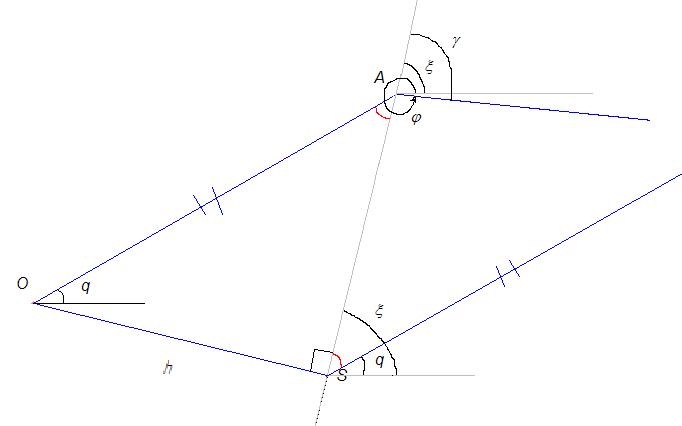
![]()
![]() =>
=>  (как накрестлежащие) =>
(как накрестлежащие) =>
=> ![]()
![]()
Кинетостатический расчет механизма
Силовой анализ механизма
Задачи силового анализа
Основной задачей силового анализа является определение реакций в кинематических парах. Знание этих усилий необходимо для расчета звеньев и кинематических пар на прочность, жесткость и долговечность. Результаты силового расчета используются при выборе двигателя, проектировании корпусных деталей, фундамента.
Реакции определяются в расчетном положении. При определении реакций считаем, что закон движения звеньев механизма задан.
В ходе силового анализа также определяется движущий момент, который необходим для выбора двигателя механизма.
Определение сил тяжести
Массы звеньев определяем через погонную массу, которая задана в техническом задании.

Далее определяем силы тяжести звеньев:
|
|
|
|
|
Определение сил инерции
Определение проекций сил инерции звеньев механизма:
Определение моментов сил инерции
Определение моментов инерции звеньев механизма
|
|
|
|
|
Целью кинетостатического анализа является нахождение реакций связей и обобщенного удерживающего момента, он проводится в направлении, обратном направлению геометрического анализа. Сначала рассматриваются группы последнего структурного слоя, а в конце те, которые первыми присоединяются к стойке. Будем последовательно составлять системы кинематического анализа, начиная с выходной группы и заканчивая кривошипом. В приведенных ниже расчетах мы не будем учитывать силу трения.
Группа ПВП:
 =>
=>
=> 
Группа 2:
 =>
=>
R32=R23
|
 +
+

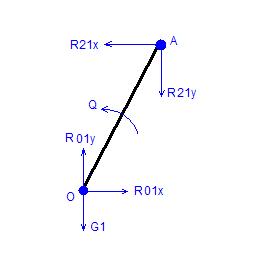
Кривошип:
 =>
=>
 =>
=>
Обобщенную движущую силу Q можно вычислить с помощью принципа Даламбера-Лагранжа, это выражение будет являться проверкой наших последовательных решений систем с подстановкой в каждую решения предыдущей:
![]() -
-
![]()
Ниже приведем совмещенные графики обобщенной движущей силы, посчитанной двумя разными, описанными выше способами: