
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Урок 36.
Scribbler Program Maker GUI.
Блок ветвления, следование по линии.
Сенсоры линии используют два оптических детектора, расположенных в нижней части робота для определения света или темноты, обеспечивающих движение робота по темной линии. Линии создаются с помощью программы, поставляемой с роботом, распечатывающей на принтере черные линии для движения. Есть четыре состояния определения линии: черная линия не видна, черная линия видна левым сенсором, черная линия видна правым сенсором, черная линия видна обоими сенсорами (как показано на рисунке выше).
С помощью ползунка можно установить число повторений проверок идущих подряд прежде, чем условие станет истинным (максимально 8). На рисунке выше показана, что линия должна быть обнаружена левым сенсором три раза подряд, прежде чем условие станет истинным.
Если Вы используете одно и тоже условие более одного раза в ELSE-IF выражении, но с различным числом последовательных наблюдений, можно запрограммировать разную реакцию на различное число повторений (как показано на рисунке выше). Как показано в примере, сначала необходимо проверять большее число повторений, затем меньшее.
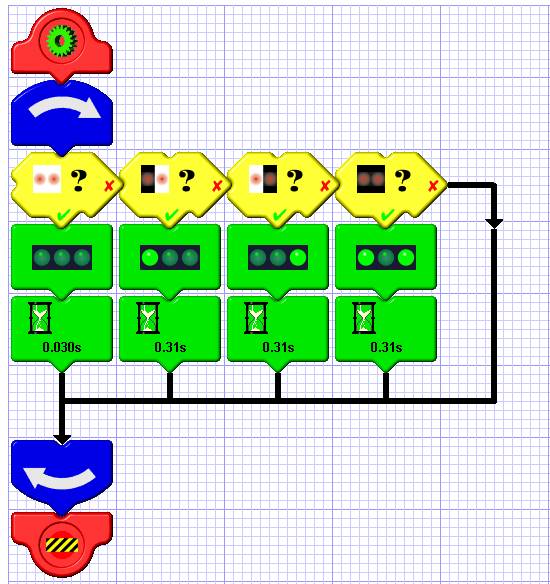
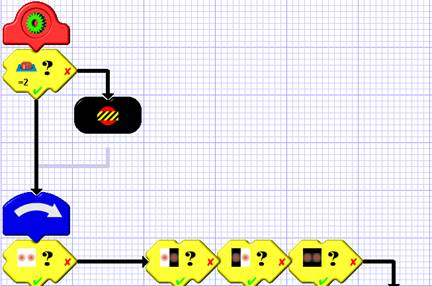
Будем создавать программу, в которой робот стоит на месте и в бесконечном цикле проверяет состояние сенсоров линии:
Если робот не видит линии, то Погасить все индикаторы. Пауза 0,3 секунды. Иначе, если робот видит линию левым сенсором, то: Включить левый индикатор. Пауза 0,3 секунды. Иначе, если робот видит линию правым сенсором, то: Включить правый индикатор. Пауза 0,3 секунды. Иначе, если робот видит линию обеими сенсорами, то: Включить левый и правый индикаторы. Пауза 0,3 секунды.При выполнении этой программы надо расположить робота над линией (почти прижав его к листку), и водить робота вправо и влево, наблюдая за тем, как сенсоры видят линию. Программа приведена ниже. Создайте и выполните эту программу.
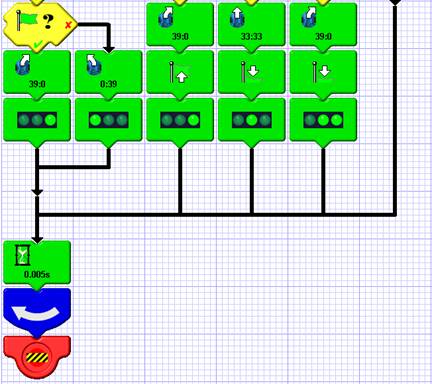
Будем создавать программу, в которой робот ожидает нажатие 2 раза кнопки «reset», а затем следует по линии. В этой программе обратите внимание на усилия левого и правого колеса робота, применяемые в различных случаях обнаружения линии. Также в этой программе мы первый раз используем паузу 0,005 секунды.
Идея создания такой программы принадлежит Лазареву Михаилу Викторовичу.
 Программа приведена ниже, создайте и выполните эту программу. Проверьте работу этой программы на трассе.
Программа приведена ниже, создайте и выполните эту программу. Проверьте работу этой программы на трассе.
Автор уроков .
*****@***ru
телефон (4852) 55-87-19, сотовый 8-915-975-67-46
