


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
А. С. ТАЛАЛАЙ
Научный руководитель – П. Д. КРАВЧЕНКО, д. т.н., профессор
Волгодонский инженерно-технический институт НИЯУ «МИФИ»
СОВЕРШЕНСТВОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ
ПЕРЕГРУЗОЧНОЙ МАШИНОЙ С ГИБКИМ ПОДВЕСОМ ОБЪЕКТОВ ПЕРЕГРУЗКИ В ЯДЕРНОМ РЕАКТОРЕ
ТИПА ВВЭР
Предложенные конструктивные схемы перегрузочных машин с канатным подвесом объектов перегрузки позволяют упростить структуру исполнительных органов, на порядок снизить вес машины, уменьшить количество деталей, что приводит к повышению надежности в целом.
В ВИТИ НИЯУ МИФИ на кафедре «Машиностроение и Прикладная Механика» успешно испытана в лабораторных условиях модель в масштабе 1:5 перегрузочной машины МПК с гибким подвесом объектов перегрузки и новой системой управления.
Проанализированы системы управления машинами, как существующих конструкций, так и предложенных. Требуется повысить скорость работы программного обеспечения, необходимого для работы системы, используя современные технологические решения. Выявлена в основном функциональная пригодность новой системы управления.
Для применения новой системы управления на натурном образце машины МПК поставлены задачи обеспечения надежности работы всех элементов системы с проверкой качества исполнения всех операций в автоматическом режиме.
В процессе перегрузки топлива важно учитывать и контролировать каждое движение перегрузочной машины МПК. в связи с этим было принято решение доработать систему управления перегрузочной машины Возникла задача реализовать функцию контроля над выполнением каждой технологической операцией (КВТО).
Поскольку функция контроля над выполнением каждой технологической операции находится на стадии тестирования, она выделена в отдельный блок, представленный на рис. 1.
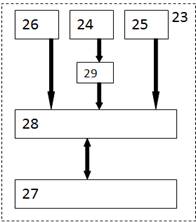
Рис. 1. Структурная схема блока контроля выполнения технологических операций
23-Блок контроля технологических операций; 24-Контактный датчик; 25-Датчик наведения; 26-Датчик натяжения троса; 27-Микроконтроллер блока 23; 28-ПЛИС блока 23; 29-АЦП блока 23.
Блок КВТО имеет прямую связь с устройствами блокировки. Это необходимо для моментальной остановки процесса перегрузки в случае возникновения нештатной ситуации.
Подробный анализ системы управления перегрузочной машины с гибким подвесом МПК позволил выявить слабые звенья, дублирующие элементы.
Новая функция для системы управления позволяет контролировать процесс наведения на объект, уровень натяжения троса и качество соединения захватного механизма с объектом перегрузки.
Представленная функция находится на стадии тестирования, но уже на этом этапе показывает не плохие результаты. После полной отладки вся система будет упрощена.
Список литературы
1. Шиянов, управления перегрузочных манипуляторов АЭС с ВВЭР/ , , .- М.: Энергоатомиздат., 1987.-176 с.
2. Пат. 2319236 Российская Федерация С1 МПК 621С 19/00 (2006.01). Устройство перегрузки топливных элементов в ядерном реакторе перегрузочными машинами с гибким подвесом объектов/, М, С, заявл. 06.06.2006; опубл. 10.03.2008. Бюл. № 7.
