


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 621.313.3
ВЕКТОРНАЯ СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ НА БАЗЕ
АВТОНОМНОГО ИНВЕРТОРА ТОКА С РЕЛЕЙНЫМ РЕГУЛЯТОРОМ ТОКА
,
Россия, г. Липецк, Липецкий государственный технический университет
Векторная система управления на данном этапе развития является наиболее энергоэффективной системой управления. Применение такой системы управления для электропривода на базе автономного инвертора тока с релейным регулятором тока позволяет достичь еще более высоких показателей энергоэффективности по сравнению с существующими системами управления.
The vector control system is the most power effective control system at the given stage of development. The application of the given type of control systems provides to simplify the existed control systems and to improve quality of power supply. As a result it provides to decrease of power inputs in electrical installation and increase the time of exploitation of the equipment.
Введение. В настоящее время для механизмов малой и средней мощности широкое распространение получили асинхронные электроприводы на базе преобразователей частоты с автономным инвертором напряжения (АИН), использующие широтно-импульсную модуляцию (ШИМ), что объясняет простотой системы управления. Преобразователи частоты на базе автономного итнвертора тока (АИТ) не получили широкого применения поскольку их применение требует построения сложных замкнутых систем. Предложена система управления АИТ с релейным регулятором тока, которая упрощает схему управления и увеличивает качество напряжения.
Предлагаемая система управления. В существующих частотно-управляемых электроприводах при использовании ПЧ с АИТ емкостной фильтр, установленный параллельно с двигателем, используется для фильтрации выходного тока и предотвращения перенапряжений на зажимах двигателя. Предлагается, используя АИТ как источник тока, формировать напряжение на конденсаторах выходного фильтра или ток обмотки статора.
Структурная схема асинхронного электропривода с преобразователем частоты на базе АИТ С РРТ представлена на рис. 1а. Принцип его работы описан в источниках (4).
Наибольшее распространение получили системы векторного управления, использующие в качестве опорного вектора векторы главного потокосцепления машины или потокосцепления ротора. В исследуемой системе управления электроприводом отдано предпочтение векторному управлению, ориентированному по потокосцеплению ротора, математическое описание которого описывается менее сложными уравнениями.
Уравнение электромагнитного момента асинхронного двигателя при управлении по потокосцеплению ротора имеет вид:
![]() ,
,
где ![]() - угол между вектором тока статора и главным потокосцеплением.
- угол между вектором тока статора и главным потокосцеплением.
Из уравнения электромагнитного момента двигателя следует, что электромагнитный момент двигателя пропорционален синусу угла ![]() между векторами тока статора и потокосцеплением ротора (см. рис.1 б).
между векторами тока статора и потокосцеплением ротора (см. рис.1 б).
а) |
б) |
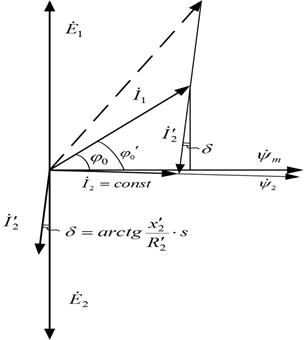
Рис.1. а) Структурная схема асинхронного электропривода с преобразователем частоты на базе АИТ С РРТ
б) Векторная диаграмма токов и потоков при управлении с постоянным магнитным потоком
Электропривод переменного тока содержит преобразователь частоты, асинхронный электродвигатель, датчики тока, датчик скорости. Управление преобразователем частоты на базе АИТ осуществляет релейный регулятор тока (РРТ), на который поступают сигналы задания на ток статора из системы векторного управления и токи обратной связи. Управляющими воздействиями в векторной системе являются задание на скорость и задание на потокосцепление ротора. Векторная система управления состоит из регулятора скорости, регулятора потокосцепления, блоков преобразования координат DQ-ABC, ABC-DQ, блоков вычисления синусоидальной и косинусоидальной составляющей тока статора, блока расчета угла поворота системы координат DQ относительно αβ, блока вычисления потокосцепления ротора.
Применение асинхронных электроприводов с высокими энергетическими показателями является одной из главных задач в условиях современного производства. Основными энергетическими показателями электропривода являются коэффициент мощности ![]() и КПД. Зачастую улучшение коэффициента мощности требует применения различных устройств для компенсации реактивной мощности, потребляемой из сети, однако это приводит к увеличению габаритов системы, снижает надежность работы и может быть рекомендовано для мощных электроприводов промышленных механизмов. КПД системы определяется полезной мощностью на валу двигателя и потерями в системе, числом ступеней преобразования энергии, алгоритмом управления инвертора. Последнему критерию, как известно, удовлетворяют электропривода с векторным управлением. Однако испытания показали, что при питании АД от ПЧ номинальная мощность снижается практически на 10%, также уменьшаются значения вращающих моментов. Перегрев обмотки статора превышает допустимые значения. Причиной этого являются добавочные потери, вызванные высшими гармониками, генерируемыми ПЧ.
и КПД. Зачастую улучшение коэффициента мощности требует применения различных устройств для компенсации реактивной мощности, потребляемой из сети, однако это приводит к увеличению габаритов системы, снижает надежность работы и может быть рекомендовано для мощных электроприводов промышленных механизмов. КПД системы определяется полезной мощностью на валу двигателя и потерями в системе, числом ступеней преобразования энергии, алгоритмом управления инвертора. Последнему критерию, как известно, удовлетворяют электропривода с векторным управлением. Однако испытания показали, что при питании АД от ПЧ номинальная мощность снижается практически на 10%, также уменьшаются значения вращающих моментов. Перегрев обмотки статора превышает допустимые значения. Причиной этого являются добавочные потери, вызванные высшими гармониками, генерируемыми ПЧ.
 Рис. 3. Функциональная схема системы управления электроприводом с ПЧ на базе АИТ с РРТ
Рис. 3. Функциональная схема системы управления электроприводом с ПЧ на базе АИТ с РРТ
Использование предлагаемой системы векторного управления по потокосцеплению ротора управления позволит улучшить энергетические показатели электропривода за счет уменьшения добавочных потерь.
Литература
1. Соколовский переменного тока с частотным регулированием. – М.:Academia. 2006. – 259 c.
2. Герман-Галкин моделирование полупроводниковых систем. – СПб.: КОРОНА. 2001. – 320 c.
3. Черных электротехнических устройств в MATLAB, SimPowerSystems и Simulink. – М.: ДМК Пресс. 2008 – 288 с.
4. , Абросимов систем управления электроприводом на базе автономного инвертора тока с релейными регуляторами тока и релейными регуляторами напряжения со сглаживающим емкостным фильтром. – Электротехнические комплексы и системы управления 2011/3.
, д. т.н., профессор, зав. каф. электропривода ЛГТУ, 398036, 4, 96,
, работник энергопроизводства ОАО «НЛМК», 398024, 0, т. 8-950-801-02-57, *****@***ru
