
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
На наше счастье новаторские идеи были впоследствии по отдельности обнаружены в различного вида литературе. Уже упоминался тот факт, что Шампандар активно нес в своей книге в массы идею наделения интеллекта телом (воплощённый анимат), поместить интеллект в среду обитания предлагает Александр Аркадьевич Жданов, а подход Нечёткой логики твердит о синхронизации мыслительного процесса с естественным языком. Тем самым мы убедились в законности наших предположений и можем продолжить работу.
Создание модели анимата как объекта в модели мира
Рас мы хотим наделить тело интеллектом, не помешает для начала решить вопрос о том, что это тело будет из себя представлять. Хорошо решить какими возможностями наделить нашего «Адама», дабы не обидеть и не сильно усложнить ему жизнь. Стоит отметить, что профессор Жданов выражает другое мнение по этому вопросу, он перекладывать на интеллект задачу разобраться с телом, но на данном этапе мы упростим себе жизнь.
Итак, примем априори следующие факты:
1. Анимат не выходит за рамки принятой модели и является всего-навсего объектом мира с высокой сложностью процедуры, вызов которой «порождается его существованием». Анимат не имеет ни малейших приоритетов над другими объектами (возможен разве что параллельный поток процесса вычисления принимаемого решения) это полностью соответствует подходу воплощённых аниматов.
2. Анимат имеет возможность во время своей «процедуры жизни» (событие, вызываемое его существованием) сделать одно из следующих действий:
2.1. Шаг вперед. Передвигает анимата на константное расстояние в направлении взгляда.
2.2. Поворот. Изменить угол своей ориентации в пространстве (взгляда) на константный угол в положительную или отрицательную сторону.
2.3. Взять. Анимат имеет хранилище руки, при исполнении этого действия он «делает хватательное движение в направлении взгляда (создать перед собой объект который «подбирает» предметы). В случае если «хватательное движение» возымело успех (факторы, препятствующие этому, заранее не определены) у анимата в руках появляется предмет. Хватательное движение с предметом в руках приводит к потере этого предмета.
2.4. Использовать. Анимат использует то, что у него в руках. Инициализируется событие, описанное у подобранного предмета как реакция на использование. В случае, если в руках ничего нет, анимат «использует» руки.
Итак, мы описали модель анимата, далее можно приступать к работе по наделению его разумом (На данном этапе анимат ещё не обладает возможностью разговаривать, это сделано для упрощения задачи, но несмотря на отсутствие речевого аппарата мы будем стремиться к разговору уже сейчас).
Анализ существующих подходов к созданию искусственного разума
Подходов к созданию ИИ достаточно много. У каждого свои плюсы и минусы. Достаточно сложный выбор. Далее мы рассматриваем два наиболее популярных и наиболее сложных подхода, все же прочие отбрасываем как не подходящие без объяснения причины.
Наиболее привлекли наше внимание два подхода к созданию ИИ это подход, основанный на нечёткой логике и подход с применением нейронных сетей.
Нечёткая логика
Крайне интересный подход, заключается в логических вычислениях с тем допущением, что вместо 0 и 1 (как в обычной булевой логике) теперь используется любое значение [0;1], это позволяет принимать неопределённые решения. Он интересен по причине наличия в нем так называемых лингвистических переменных[15]. Оперирование с последними позволяет задавать компьютеру правила в виде предложений на естественном языке. Как отмечено выше, именно этого мы и хотели. Нечёткая логика позволяет проводить качественную оценку происходящего и принимать вероятностные решения.
Мы хотим использовать этот подход для разработки логической (а позднее и речевой) частей интеллекта.
Для лучшего обзора подхода реализован первый простейший анимат на нечёткой логике. Создан анимат с достаточно ограниченной функциональностью. Была поставлена простейшая задача следующего характера, анимат случайно блуждает по миру (алгоритмы блуждания описаны в книге Алекса Шампандара), в мире абсолютно плоский ландшафт, на котором время от времени попадаются фрукты. Натыкаясь на фрукт, анимат его подбирает и думает - надо ли его есть. У каждого фрукта имеются три известные характеристики (соответствующие его цвету, Цвет определяется по RGB палитре от 0 до 255 каждый параметр)
1. Красный - Опасность. Шанс отравится фруктом. В случае отравления наносится урон здоровью анимата (случайный, но зависящий от степени опасности).
2. Синий – Жаждоутоление. От жажды анимата отнимается цвет предмета +128 умноженный на случайный коэффициент. Это означает, что от некоторых фруктов жажда утолится, а от некоторых наоборот захочется пить.
3. Зелёный – Сытность. То же самое, что и жаждоутоление, только для параметра голода.
Если анимат сильно голоден или хочет пить, наносится урон его здоровью, если анимат переел или перепил, урон наносится также. Если голод и жажда находятся на оптимальном уровне, здоровье восстанавливается.
Задача интеллекта как можно дольше сохранять жизнь анимату, и по возможности поддерживать его в максимально здоровом состоянии.
Специально для нечёткой логики нами был написан так называемый интерпретатор (программа вычисляющая значение функции указанной в текстовой строке), который позволил писать функции принадлежности в прикрепляемых файлах и редактировать из программы.
На основе всего этого в программу вмонтировано шесть лингвистических переменных
1. Опасность
Для данной лингвистической переменной опишем три стандартных терма: Маленькая, Средняя, Большая (Мы считаем, что этих термов в соотношении с грамматическими правилами будет достаточно)
Опишем следующую универсальную грамматику для всех переменных.
«Очень». f(x)=X2.
«Не то что бы» f(x)=X1/2
Достаточно стандартные грамматические модификаторы, описанные в широких кругах литературы.
Для каждого терма опишем функцию принадлежности, ибо она необходима для операции фазификации.
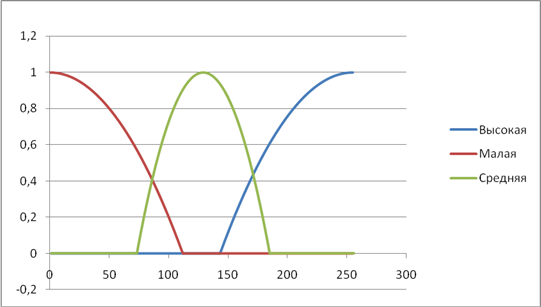
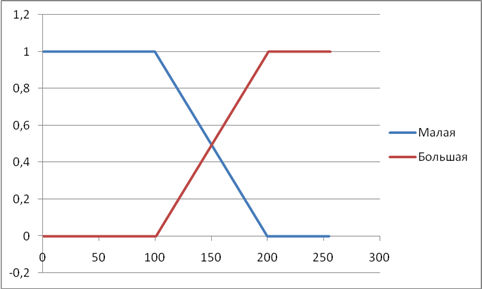
2. Сытность. Описано два терма Сытный и несытный с функциями принадлежности.
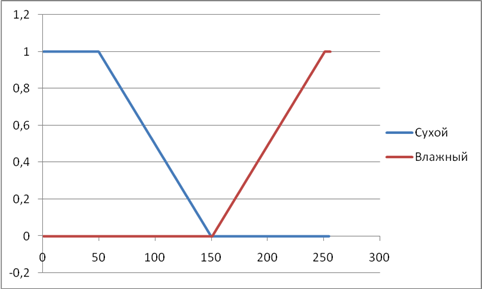
3. Влажность. Два терма сухой влажный, показывающие полезен данный продукт с целю, утолить жажду или нет.
4. Голод, 5 Жажда, 6 Здоровье: Последние три имеют функции принадлежности аналогичные с первым.
И, наконец, стоит составить для анимата базу нечётких правил. Составление нечётких правил, как и описание функций принадлежности, задача эксперта, а потому не имеет четкого и однозначного решения.
Мы исходим из того, что у анимата есть два решения проблемы. Съесть или не съесть найденную пищу, за счет нечеткой логики мы оставляем случайность выбора, но делаем некоторую логическую коррекцию со смещением в ту или иную сторону в зависимости от условий.
Опишем функцию нечёткого вывода. На основе каждого правила будет формироваться решение: Съесть или не съесть, после же предлагаем следующую операцию для синтеза решения.
На основе предыдущих выводов вероятность съедания a получили вывод о вероятности съедания бы в ходе вычисления последнего правила. Ныне производим присваивание:
a=? a*b*q<1: a*b*q; 1. (Синтаксис языка программирования С++). Где q активационная константа q>1. Смысл подобного выражения, следующий т. к. b принимает значение из промежутка [0;1] то при умножении на q мы получаем выражение либо >1, либо <1 если b*q >1 то, а увеличивается (но вследствие условия не может перескочить единицу). Иначе a уменьшается, но не может перескочить 0, Ели в итоге хотя бы одного правила выскочило, что есть это ТОЧНО не надо (0) то у анимата даже не возникнет мысли об употреблении.
Теперь преступим к составлению списка нечётких правил.
Путем логических размышлений мы вывели следующие нечеткие правила.
1. Если фрукт. опасность = большая, то Вероятность = малая
2. Если фрукт. влажность = сухой то вероятность = малая
3. Если фрукт. влажность = влажный и я. жажда=малая то вероятность = высокая
4. Если фрукт. сытность = высокая и я. голод=малый то вероятность = высокая
На основе вышеизложенных выводов создана компьютерная программа мы провели несколько экспериментов из которых ясно видно что мыслящий анимат живет дольше чем тот, что действует наобум.
Нейронные сети.
Подход, основанный на создании и обучении нейронных сетей, относят к восходящим подходам, моделируя нейронную сеть, мы модулируем мельчайшую долю человеческого мозга. Главным минусом данного подхода является то, что количество нейронов в голове человека слишком велико для современных компьютеров, а основным плюсом, то, что мы заставляем программу действовать практически также, как действует мозг, значит, результаты буду достаточно близки к требуемым..
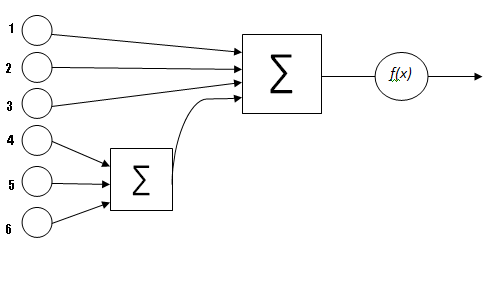
Для более детального изучения данного подхода мы решили смоделировать нейронную сеть для решения выше описанной задачи про поедание фруктов.
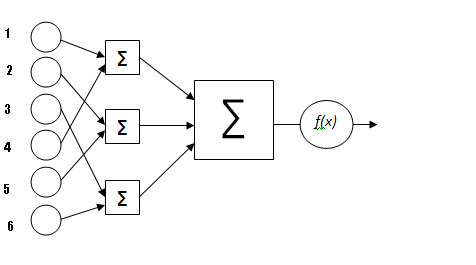
Для моделирования сети мы используем 6 входов по числу имеющихся переменных, описывающих ситуацию. Известно, что нейронная сеть работает линь со значениями от -1 до 1, поэтому первым делом мы загоним наши значения в эти рамки.
Итак, список входов.
1.R – Опасность. Принимает значения от 0 до единицы. Ноль соответствует 0 красного цвета единица – 255.
2.G – Сытность продукта. Ноль соответствует 0 зелёного цвета единица – 255.
3.B - Влажность продукта. Принимает значения от -1 до единицы. -1 – соответствует 0 синего, 0 – соответствует 128 синего, 1 – 255 соответственно.
4.Hp – Здоровье анимата. От 0 до единицы.
5.AG – Потребность в еде. От 0 до единицы.
6.AB – Жажда. От 0 до единицы.
Нами были разработаны две модели нейронной сети для решения данной задачи.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
