

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
На правах рукописи

ОБЕСПЕЧЕНИЕ ЭФФЕКТИВНОСТИ ГОРОДСКОГО
МНОГОЦЕЛЕВОГО МАЛОГАБАРИТНОГО ТРАНСПОРТНОГО
СРЕДСТВА СОВЕРШЕНСТВОВАНИЕМ КОНСТРУКТИВНОЙ СХЕМЫ И ОПТИМИЗАЦИЕЙ БАЗОВЫХ ПАРАМЕТРОВ
05.05.03 – Колесные и гусеничные машины
Автореферат
диссертации на соискание ученой степени
кандидата технических наук
Челябинск - 2010
Работа выполнена на кафедрах автомобильной техники Челябинского высшего военного автомобильного командно-инженерного училища
Научный руководитель - кандидат технических наук, доцент
.
Официальные оппоненты: доктор технических наук, профессор
;
кандидат технических наук, доцент
.
Ведущая организация - ВИС - АВТО» (г. Тольятти)
Защита состоится «24» ноября 2010 года, в 15:00 часов на заседании диссертационного совета Д 212.298.09 при Южно-Уральском государственном университете г. Челябинск, проспект им. , 76, ауд. 1001 главного корпуса.
С диссертацией можно ознакомиться в библиотеке ЮУрГУ.
Отзыв на автореферат в двух экземплярах, заверенных печатью, просим направлять на имя ученого секретаря г. Челябинск, проспект им. , 76, ЮУрГУ, Ученый Совет.
Тел.: 8 (351) 267-91-23
E-mail: *****@***ru
Автореферат разослан «23» октября 2010 г.
Ученый секретарь специализированного диссертационного совета Д 212.298.09
|
|

ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность проблемы. Вследствие постоянного развития городов происходит увеличение транспортных потоков. В результате возникло требующее разрешения противоречие между возможностью автомобиля обеспечивать свободу передвижения и проблематичностью реализации этой возможности в транспортной системе современного города.
Особенностями использования автомобилей в современных городских транспортных системах является сочетание высокой интенсивности движения на коротких участках при снижении средней скорости до 15-30 км/час с многочисленными парковками. При этом коэффициент использования мощности автомобильных двигателей составляет не более 0,3-0,5 при существенном ухудшении экономичности и повышении токсичности отработавших газов. Более 80% автомобилей имеют суточный пробег до 40-60 км, в 90% случаев в 4-5 местном автомобиле передвигаются 1-2 человека (в среднем 1,6). В результате эффективность как автомобиля, так и транспортной системы в целом резко снижается.
Таким образом, налицо несоответствие между современными требованиями к городскому автомобилю и традиционными схемами легковых автомобилей. Это указывает на необходимость разработки и апробирования нетрадиционной схемы городского многоцелевого малогабаритного транспортного средства (ГММТС) с оптимальными для городского движения базовыми параметрами, учитывающей его назначение и место в городской транспортной системе с сочетанием высокой интенсивности движения на коротких участках с многочисленными парковками и маневрированием на ограниченных площадках. Ограниченное количество теоретических работ в этой области свидетельствует об актуальности темы исследования.
Цель работы - обеспечение эффективности ГММТС за счет разработки рациональной нетрадиционной конструктивной схемы, определения оптимальных базовых параметров и схемы управления.
Цель достигается постановкой и решением следующих задач:
1. Обосновать концепцию нетрадиционной конструктивной схемы ГММТС, обеспечивающей высокую маневренность и управляемость, экономичное использование площадей для маневрирования и парковки.
2. Развить аналитическую модель стационарного поворота ГММТС разработанной конструктивной схемы, применимую для описания движения с малыми радиусами поворота при скоростях от 10 до 60 км/час, включая поворот на месте.
3. Установить закономерности изменения характеристик поворотливости ГММТС при маневрировании со скоростями от 10 до 60 км/час в функции базовых параметров и схем управления.
4. Установить области допустимого изменения базовых параметров и характеристик схем управления для обеспечения заданных требований и ограничений.
5. На основании полученных расчетных данных разработать и изготовить управляемую действующую масштабную модель ГММТС нетрадиционной конструктивной схемы с изменяемыми базовыми параметрами, обеспечивающую физическое подобие кинематики и динамики движения модели и автомобиля.
6. Оценить управляемость и маневренность обоснованной схемы.
Объект исследования – городское многоцелевое малогабаритное транспортное средство нетрадиционной конструктивной схемы.
Предмет исследования - эксплуатационные свойства ГММТС, обеспечивающие эффективное применение машины в городских условиях.
Методика исследования. Исследования проведены с использованием методов теории автомобилей, теоретической механики, математического и физического моделирования. Методика исследования предусматривала сочетание испытаний модели автомобиля с многофакторным численным экспериментом. Достоверность результатов обосновывается: подтверждением теоретических результатов экспериментальными; применением экспериментальных методов исследования, соответствующих государственным стандартам; сопоставлением результатов с данными других исследователей.
Научная новизна.
1. Обоснована концепция трехопорного ГММТС с бортовым поворотом, мотор-колесами и передней шаровой самоустанавливающейся опорой. Данная конструкция обеспечивает высокую маневренность и управляемость, экономичное использование площадей для маневрирования и парковки.
2. Разработана математическая модель криволинейного движения трехопорного транспортного средства с передней самоустанавливающейся опорой и бортовым поворотом, позволяющая на ранней стадии проектирования определить силовые и кинематические характеристики ГММТС с различными схемными и констуктивными решениями, а также обоснованно выбирать и оптимизировать основные параметры ГММТС и оценить схемные решения. Это сокращает затраты времени и средств на проведение НИОКР и ускоряет постановку на производство новой техники.
3. Установленa область допустимых параметров ГММТС для обеспечения высокой маневренности и устойчивости.
Практическая ценность и реализация результатов работы.
1. Повышение эффективности городского многоцелевого малогабаритного транспортного средства предлагаемой конструктивной схемы как объекта городской транспортной системы современного мегаполиса. Новизна технического решения, примененного в данной модели, подтверждена патентом на полезную модель.
2. Возможность исследования управляемости и маневренности городского многоцелевого малогабаритного транспортного средства на базе спроектированной и построенной модели ГММТС и регистрационного комплекса. Комплекс может быть использован для исследования управляемости и маневренности автомобилей с другими схемами управления.
3. Полученные практические результаты используются: при проведении НИОКР по разработке перспективных образцов техники в ВИС - АВТО», ЧВВАКИУ, а также используются в учебном процессе при выполнении курсовых и дипломных проектов и чтении отдельных разделов лекций по дисциплинам: «Автомобильная техника», «Конструкция и расчет автомобилей» в ЧВВАКИУ, ЮУрГУ.
Апробация работы. Основные положения диссертации были доложены и обсуждены на международных научно-технических конференциях «Экологические проблемы в транспортно-дорожном комплексе» (Москва, 2005), «Достижения науки – аграрно-промышленному производству» (Челябинск, 2006, 2007), «Приоритеты развития отечественного автотракторостроения и подготовки инженерных и научных кадров» (Москва, 2009), межрегиональной научно-технической конференции АВН «Повышение эффективности колесных и гусеничных машин многоцелевого назначения» (Челябинск, 2010), межвузовских научно-технических конференциях Южно-Уральского государственного университета (2005-2008), Челябинского государственного агроинженерного университета (2006, 2007), научно-технических конференциях Челябинского высшего военного автомобильного командно-инженерного училища (военного института) (2006-2010).
Публикации. Основные положения диссертации опубликованы в 18 работах, получен 1 патент на полезную модель.
Объем и содержание работы. Диссертация содержит 123 стр. текста, 75 рисунков и состоит из введения, четырех глав, выводов, списка использованной литературы, включающего 100 наименований и приложений.
ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении обоснована актуальность проблемы, поставлена цель, сформулированы научная новизна и практическая ценность работы, дана её общая характеристика и изложено краткое содержание.
В первой главе приведен краткий обзор работ по теме диссертации, рассмотрено состояние вопроса по исследуемой теме и обоснованы задачи, решение которых позволить достичь цели работы - обеспечения эффективности городского многоцелевого малогабаритного транспортного средства.
В настоящее время наблюдается отчетливая тенденция использования растущей эффективности транспорта для расширения сферы передвижения.
Под эффективностью использования автомобиля понимаем выполнение транспортной работы в более короткий срок с наименьшим расходом мощности.
В современных транспортных системах крупных городов потенциальные возможности автомобилей не только не используется, но и не могут быть использованы в дальнейшем. В результате эффективность как автомобиля, так и транспортной системы в целом резко снижается и составляет не более ![]() =0,2-0,4. В то же время, эффективность других транспортных средств находится на уровне не ниже
=0,2-0,4. В то же время, эффективность других транспортных средств находится на уровне не ниже ![]() =0,75-0,8. Таким образом, налицо несоответствие между современными требованиями к городскому автомобилю и его техническими характеристиками.
=0,75-0,8. Таким образом, налицо несоответствие между современными требованиями к городскому автомобилю и его техническими характеристиками.
Это ставит задачу разработки городского многоцелевого малогабаритного транспортного средства, учитывающей его назначение и место в городской транспортной системе с сочетанием высокой интенсивности движения на коротких участках с многочисленными парковками.
В заключение главы сформулированы цели и задачи исследования.
Во второй главе на основании анализа применения автомобиля в городских условиях выявлено, что определяющее влияние на повышение эффективности автомобиля в городской транспортной системе оказывает его важное комплексное эксплуатационное свойство - маневренность, являющаяся функцией конструктивной схемы, базовых параметров и схемы управления.
Детальному анализу для синтеза наиболее рациональных конструктивных решений были подвергнуты следующие шесть схем:
1. Традиционные трех или четырехколесные схемы мини-автомобилей (трициклы или квадрициклы), имеющие передние или задние ведущие колеса и управляемое переднее колесо или колеса.
2. Схема, имеющая два задних ведущих мотор - колеса, силовой (бортовой) поворот и передние шаровые опоры (концепткар фирмы Peugeot).
3. Четырехколесная схема, имеющая силовой (бортовой) поворот.
4. Схема, имеющая четыре ведущих мотор - колеса с независимым управлением (концепткары фирмы TOYOTA и консорциума СКАТ).
5. Схема, имеющая неповоротные колеса и ломающуюся раму.
6. Схема, имеющая два передних (задних) мотор - колеса, бортовой поворот и заднюю (переднюю) самоустанавливающуюся опору (колесо или шар).
|
|
Рисунок 1 - Схема поворота ГММТ при качении без бокового увода | Рисунок 2 – Схема поворота ГММТС при качении с боковым уводом |
На основании анализа маневренности и управляемости, сложности реализации конструктивных решений обоснована концепция трехопорного ГММТС с бортовым поворотом и передней самоустанавливающейся опорой, которая может быть выполнена в виде шара или колеса. Данная схема принята для расчетов.
Полагаем, что использование самоустанавливающейся опоры может дать некоторые преимущества по сравнению с управляемым колесом. Так как вектор скорости V шара опоры всегда лежит в средней плоскости качения шара, шар будет катиться без увода (рисунок 1). Сравнивалась данная конструкция с автомобилями, выполненными по схеме 1.
Макетирование с использованием габаритных манекенов показало, что комфортное размещение водителя и пассажира возможно при базе и колее 1,2…1,5 м. Для расчетов приняты эти значения.
Минимальный радиус поворота данной схемы равен (рисунки 1 и 2):
без увода,  (1)
(1)
с уводом  , (2)
, (2)
где ![]() и
и ![]() - радиусы поворота без увода и с учетом увода автошин;
- радиусы поворота без увода и с учетом увода автошин; ![]() - база ГММТС;
- база ГММТС; ![]() и
и ![]() - скорость наружного и внутреннего мотор колес.
- скорость наружного и внутреннего мотор колес.
|
|
|
| Рисунок 3 - Внешние воздействия на ГММТС при повороте | Рисунок 4 - Схема к определению ускорений автомобиля при повороте |
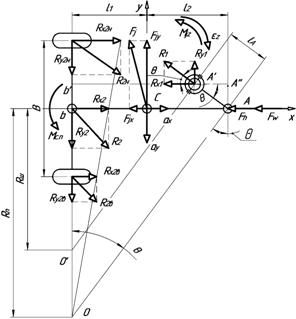
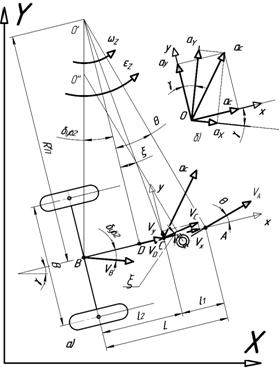
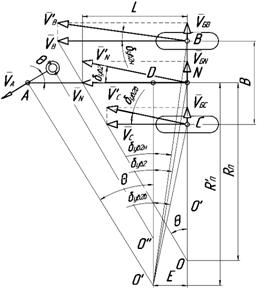
Для определения области допустимого изменения базовых параметров ГММТС разработана аналитическая модель поворота ГММТС. Внешние воздействия на ГММТС показаны на рисунке 3.
На основании схемы (рисунок 4) составляем систему уравнений кинематических связей:
 (3)
(3)
 (4)
(4)
Обозначения ясны из рисунков 3 и 4.
Инерционные силы и моменты пропорциональны соответствующим ускорениям, а их векторы направлены противоположно векторам ускорений. Cилы инерции ![]() и
и ![]() , инерционный момент
, инерционный момент ![]() (рисунок 3), с учетом выражений (3), определяются по уравнениям:
(рисунок 3), с учетом выражений (3), определяются по уравнениям:
 (5)
(5)
 (6)
(6)
 (7)
(7)
где ![]() — коэффициент приведенной массы ГММТС;
— коэффициент приведенной массы ГММТС; ![]() — радиус инерции ГММТС относительно оси
— радиус инерции ГММТС относительно оси ![]() .
.
Боковые реакции определяем из системы уравнений, составленной на основе принципа Даламбера и схемы ГММТС (рисунок 3):
 (8)
(8)
Обозначения ясны из рисунка 3.
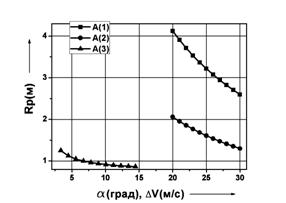
Для компьютерного анализа составлена Simulink-модель в программе «Matlab& Simulink». В результате расчетов получены зависимости радиуса поворота машины от конструктивной схемы и базовых параметров (рисунки 5 и 6).
Из полученных графиков видно, что наименьший радиус поворота обеспечивает ГММТС с базой L=1,5 м и колеей B=1,2 м. По этим размерам в масштабе 1:5 изготовлена модель-копия ГММТС для проведения испытаний.
|
|
L=1.2 м, B=1.5 | L=1.5 м, B=1.5 м |
Рисунок 5 – Влияние базы на радиус поворота ГММТС с разными схемами управления[1] |
|
|
L=1.5 м, B=1.2 | L=1.5 м, B=1.7 м |
Рисунок 6 – Влияние колеи на радиус поворота ГММТС с разными схемами управления |
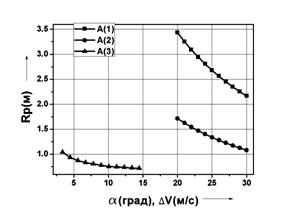
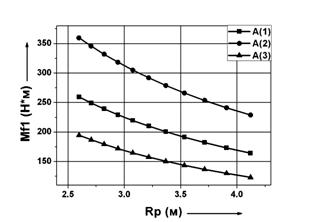
Сравнительный анализ графиков (рисунки 5 и 6) показывает, что у ГММТС с бортовым поворотом и передней самоустанавливающейся опорой радиус поворота меньше в 1,7 раза, чем у автомобилей с передними управляемыми колесами, и в 1,2 раза – по сравнению с автомобилями со всеми управляемыми колесами. Кроме этого, схема с бортовым поворотом создает наименьший момент сопротивления повороту (рисунок 7). Наиболее маневренной из сравниваемых конструкция является машина с размером базы 1,5 м, колеи – 1,2 м, бортовым поворотом и передней самоустанавливающейся опорой.
|
Рисунок 7 - Зависимость момента сопротивления повороту от радиуса поворота автомобиля |
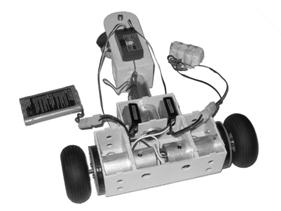
В третьей главе описан объект исследования - экспериментальная модель (рисунок 8), измерительный комплекс, методика проведения эксперимента, методы оценки погрешности измерений и анализа. Подробно рассмотрены измерительная аппаратура и специальное оборудование для управления моделью. Особое внимание уделено обоснованию основных параметров трансформируемой модели-копии ГММТС для экспериментальных исследований, при условии обеспечения физического подобия кинематики и динамики движения модели и ГММТС.
|
Рисунок 8 - Трансформируемая модель-копия ГММТС для экспериментальных исследований |
Регистрация результатов испытаний производилась с помощью компьютерного измерительного комплекса и программного обеспечения «Power Graph».
Методом анализа размерностей были выведены соотношения, характеризующие работу модели и прототипа ГММТС.
В четвертой главе приведены результаты экспериментальных исследований маневренности и управляемости ГММТС, выполненных на трансформируемой модели-копии ГММТС. Исследования проводились в несколько этапов.
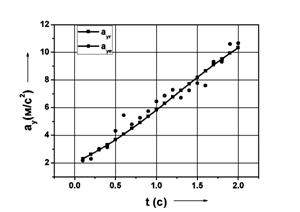
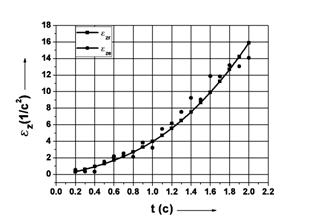
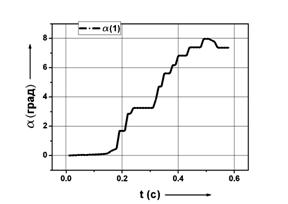
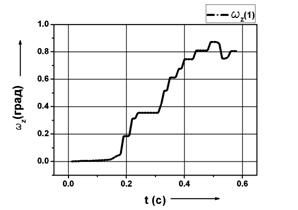
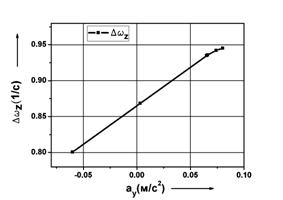
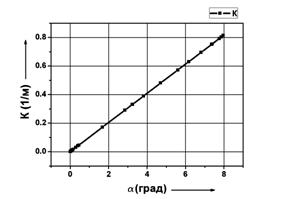
На первом этапе устанавливалась адекватность математической и физической моделей. Сравнением теоретических и экспериментальных зависимостей установлена достаточная адекватность разработанной аналитической модели стационарного поворота ГММТС (рисунок 9)[2].
|
|
Рисунок 9 - Проверка адекватности математической и физической модели сравнением расчетных и экспериментальных величин линейной и угловой скорости модели, бокового и углового ускорений |
На втором этапе исследовались управляемость и маневренность ГММТС по методике, изложенной в ЕЭК ООН № 79 и ГОСТ Р 52302-2004. Результаты испытаний «стабилизация» показаны на рисунке 10.
Таблица - 1 Результаты испытания ГММТС «стабилизация»
|
|
|
| ||||
эксп. | норм. | эксп. | норм. | эксп. | норм. | эксп. | норм. |
225.1 | 240 | 0 | 20 | 8.98 | 30 | 0.14 | - |
|
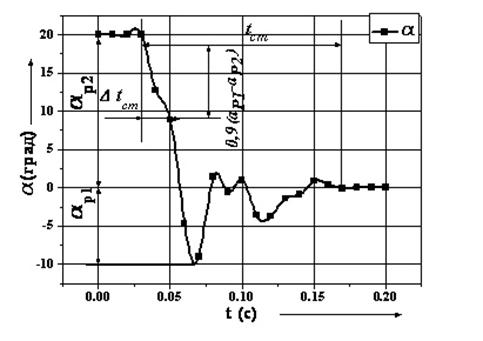
Рисунок 10 - Изменение угла поворота рычага управления во
времени при испытании «стабилизация».
По результатам испытаний (таблица 1) видно, что показатели ГММТС меньше нормативных значений и обеспечивают достаточную стабилизацию транспортного средства при выходе из поворота.
|
|
|
|
Рисунок 11 – Результаты испытаний «рывок руля» |
На рисунке 11 представлены результаты испытаний «рывок руля». Анализ результатов испытаний показывает, что показатели ГММТС находятся на уровне нормативных значений.
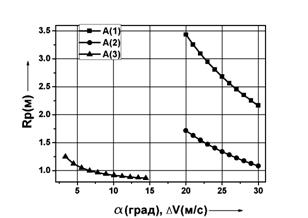
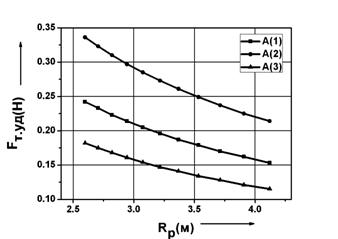
График удельной силы тяги ГММТС разных конструктивных схем, необходимой для совершения поворота с радиусом RP, показан на рисунке 12.
|
Рисунок 12 - Удельная сила тяги, необходимая для совершения поворота |
Результаты экспериментальных исследований позволили уточнить базовые параметры и характеристики схем управления ГММТС (рис. 10, 11) и рекомендовать в качестве наиболее рационального конструктивного решения для практической реализации схему 7 (два ведущих мотор-колеса, бортовой поворот и самоустанавливающаяся опора). По сравнению с традиционными трех - или четырехколесными схемами, предлагаемая схема ГММТС обеспечивает лучшую маневренность и меньшее сопротивление повороту и может быть использована в городских условиях для повышения эффективности транспортных систем городов.
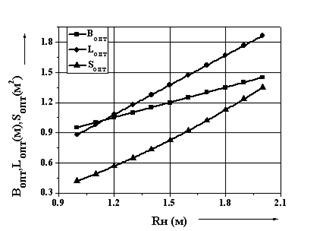
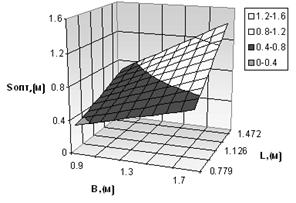
Решена задача оптимизации размеров ГММТС для обеспечения возможности разворота машины на ![]() в ограниченном пространстве. В качестве критерия оптимизации целесообразно считать оптимальными такие размеры, при которых ее площадь в плане получается максимальной и, вместе с тем, обеспечивается вписывание машины в заданный ГКД.
в ограниченном пространстве. В качестве критерия оптимизации целесообразно считать оптимальными такие размеры, при которых ее площадь в плане получается максимальной и, вместе с тем, обеспечивается вписывание машины в заданный ГКД.
Используя геометрические зависимости, найдем соотношение между базой, колеей ГММТС и внешним радиусом поворота (рисунок 13):
|
|
Рисунок 13 - Движение ГММТС по кольцевому ГКД |
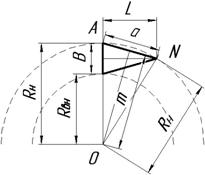
 (9)
(9)
 (10)
(10)
 (11)
(11)
Зависимость оптимальных параметров от внешнего радиуса поворота показана на рисунке 14.
а |
б |
Рисунок 14 - Зависимости оптимальных параметров ГММТС: а) от минимального радиуса поворота; б) оптимальной площади ГММТС от оптимальных базы и колеи |
ОСНОВНЫЕ РЕЗУЛЬТАТЫ И ВЫВОДЫ
1. Обоснована концепция трехопорного ГММТС, включающая использование бортового (силового) поворота мотор-колес в сочетании с самоустанавливающейся передней опорой, обеспечивающая высокую маневренность и управляемость, экономичное использование площадей для маневрирования и парковки.
2. Развита математическая модель стационарного поворота трехопорного ГММТС с двумя мотор-колесами и самоориентирующейся опорой, применимая для описания движения с малыми радиусами поворота при скоростях от 10 до 60 км/час, включая поворот на месте, позволяющая на ранних стадиях проектирования оценить схемные решения и обоснованно выбирать и оптимизировать основные параметры машины, исходя из заданных требований.
3. Установлены закономерности изменения характеристик поворотливости ГММТС при маневрировании со скоростями от 10 до 60 км/час в функции базовых параметров и схем управления. Экспериментальными исследованиями выявлено, что у ГММТС с бортовым поворотом и передней самоустанавливающейся опорой радиус поворота меньше в 1,7 раза, чем у автомобилей с передними управляемыми колесами, и в 1,2 раза – по сравнению с автомобилями со всеми управляемыми колесами. Кроме этого, схема с бортовым поворотом и самоустанавливающейся опорой создает момент сопротивления повороту в 1,5 раза меньший, чем автомобили с управляемыми колесами.
4. Установлены области допустимого изменения базовых параметров и характеристик схем управления для обеспечения заданных требований и ограничений. Наиболее маневренной из сравниваемых машин является двухместный ГММТС с размером базы 1400…1600 мм, колеи – 1100…1250 мм, диаметром колес 400…500мм, бортовым поворотом и передней самоустанавливающейся опорой.
5. Для оценки адекватности математической модели и экспериментальной оценки принятых решений на основании теории подобия разработана и изготовлена в масштабе 1:5 управляемая действующая модель ГММТС с изменяемыми базовыми параметрами, управляемая с помощью бортового поворота мотор-колес, имеющая переднюю самоустанавливающуюся опору, обеспечивающая физическое подобие кинематики и динамики движения ГММТС.
6. Оценена управляемость и маневренность разработанной схемы. Управляемость и устойчивость разработанной схемы ГММТС соответствуют нормативным показателям ЕЭК ООН № 79 и ГОСТ Р 52302-2004. Экспериментально установлено, что реализация концепции ГММТС исключает возможность ее опрокидывания под действием центробежных сил.
7. Применение схемы управления с бортовым поворотом позволит за счет повышенной маневренности повысить эффективность использования ГММТС в 1,4…1,6 раза по сравнению с автомобилями традиционной конструкции.
Основное содержание диссертации опубликовано в следующих работах:
Ведущие рецензируемые научные журналы и издания
1. Руднев, В. В. К вопросу разработки комбинированных энергетических установок городских автомобилей [Текст] / , , // Ползуновский Вестник.-№4. Барнаул: АГТУ,2006.-С.152-156.
2. Костров, В. Ю. Развитие концепции легковых автомобилей особо малого класса, методов и средств её реализации [Текст] / , // Транспорт Урала.-2007. -№ 2(13).-С.11-14.
3. Костров, В. Ю. Оптимизация параметров для обеспечения максимальной пощади в плане городского многоцелевого малогабаритного транспортного средства [Текст] / // Вестник академии военных наук. - № 1 (30). М. :АВН, 2010. –С. 87-90.
4. Костров, В. Ю. Обоснование конструкции городского малогабаритного транспортного средства [Текст] / // Вестник академии военных наук. - № 1 (30). М. :АВН, 2010. –С. 91-96.
В материалах международных, всероссийских и региональных конференций и других научных журналах и изданиях
5. Руднев, энергетические установки как средство решения экологических проблем в транспортном комплексе [Текст] / , , // Экологические проблемы в транспортно-доржном комплексе.-М. : МАДИ, 2005. - С.221-227.
6. К вопросу развития концепции внутригородских миниавтомобилей [Текст] / , , // Проектирование колесных машин. Материалы международной научно-технической конференции, посвященной 70-летию кафедры «Колесные машины». – М.: МГТУ им. , 2006. – С.401-405.
7. Келлер моделирования для исследования маневренности специальных малогабаритных транспортных средств [Текст] / , , , // Материалы III межрегиональной научно-практической конференции «Многоцелевые гусеничные и колесные машины: разработка, производство, модернизация и эксплуатация». – Омск: ОТИ, 2006. – С.57-59.
8. Руднев, комбинированных энергетических установок для городских автомобилей ограниченного радиуса действия (миниавтомобилей) [Текст] / , , // Актуальные проблемы теории и практики современного двигателестроения.- Челябинск: ЮУрГУ,2006. - С.86-91.
9. Костров, В. Ю. Особенности экспериментальной модели городского автомобиля для исследования его поворачиваемости и устойчивости [Текст] / , , // Сб. Повышение эффективности силовых установок колесных и гусеничных машин - Челябинск: ЧВВАКИУ, 2006. - С. 126-129.
10. Костров, В. Ю. Повышение эффективности применения автомобилей в городских условиях за счет увеличения маневренности рационализацией конструктивных факторов [Текст] / , // Научный вестник.-Вып. 19. - Автомобильная техника.- Челябинск: АВН, ЧВВАИУ, 2006.-С.101-104.
11. Костров, В. Ю. Особенности применения математического моделирования для исследования маневренности внутри городских мини автомобилей [Текст] / , // Повышение экологической безопасности автотракторной техники.- Барнаул: РАТ, АГТУ,2006.-С.86-93.
12. Нефедов, проходимости малогабаритных транспортных средств специального назначения [Текст] / , , // Материалы 54 науч.-техн. конф. ЧГАУ. - Ч.3.-Челябинск: ЧГАУ, 2006. - С.149-152.
13. Арав, многоцелевого малогабаритного городского транспортного средства [Текст] / , , // Материалы 54 науч.-техн. конференции ЧГАУ.-Ч.3.-Челябинск: ЧГАУ, 2006. - С.132-135.
14. Арав, рациональных конструктивных решений миниавтомобилей [Текст] / , , // Тр. Международного Форума по проблемам науки, техники и образования.- М.: Академия наук о земле, 2006.-Т2.- С.54-57.
15. Костров, В. Ю. Развитие модели стационарного поворота городского многоцелевого малогабаритного транспортного средства для определения рациональных базовых параметров [Текст] / // Проблемы и перспективы автомобилестроения в России.- Ижевск, ИжГТУ, 2007.-С. 107-112.
16. Костров, В. Ю. Предложения по конструкции и определению рациональных базовых параметров городского многоцелевого малогабаритного транспортного средства [Электронное издание] / // Материалы 65-й Международной научно-технической конференции ААИ «Приоритеты развития отечественного автотракторостроения и подготовки инженерных и научных кадров». – М.: МГТУ «МАМИ», 2009.
17. Костров, В. Ю. Экспериментальная модель трехопорного высокоманевренного автомобиля для исследования поворачиваемости, устойчивости и управляемости [Электронное издание] / // Материалы 65-й Международной научно-технической конференции ААИ «Приоритеты развития отечественного автотракторостроения и подготовки инженерных и научных кадров». – М.: МГТУ «МАМИ», 2009.
18. Костров, В. Ю. Особенности поворота трехопорного городского многоцелевого малогабаритного транспортного средства с самоустанавливающейся передней опорой [Электронное издание] / // Материалы 65-й Международной научно-технической конференции ААИ «Приоритеты развития отечественного автотракторостроения и подготовки инженерных и научных кадров». – М.: МГТУ «МАМИ», 2009.
19. Патент на полезную модель № 000 РФ МПК В62D 9/00 Самоходное транспортное средство [Текст] / , , и др.; [Текст] РОСПАТЕНТ. - № 000/22; заявл. 05.05.2009; опуб. 20.10.2009 Бюл. № 29.
![]() _________________________________________________
_________________________________________________
![]() Отпечатано в типографии «Фотохудожник»
Отпечатано в типографии «Фотохудожник»
55/1,
Подписано в печать 15.10.2010 г.
![]()
![]() Тираж 100 экз. Заказ №
Тираж 100 экз. Заказ № ![]() 01194
01194
[1] На графиках буквами с цифрами обозначены автомобили: А1 - с управляемыми передними (задними) колесами; A2 - с управляемыми колесами передней и задней оси; A3 - с бортовым поворотом.
[2] Индексом r на рисунках обозначены расчетные величины, индексом е – экспериментальные.
