
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Бесплатформенная система ориентации и навигации реактивного снаряда
Российская Федерация, г. Тула,
МБОУ «Лицей № 1», 11 класс
Введение
Перспективы развития высокоточных боеприпасов ракетно-артиллерийского комплекса связаны с применением современной элементной базы, средств автоматики и обработки информации, новых материалов и технологий производства. Центральное место в этом процессе занимает совершенствование методов решения задач ориентации и навигации, а также применение ресурсосберегающих технологий, позволяющих получить выигрыш в массогабаритных характеристиках, снизить стоимость и повысить надежность [1,2,3,4]. Данным требованиям в значительной степени удовлетворяют микромеханические гироскопы (ММГ) и акселерометры (ММА), создаваемые по технологии микроэлектромеханических систем (МЭМС) [1]. ММГ и ММА позволяют создавать миниатюрные бесплатформенные инерциальные навигационные системы (БИНС) для систем ракетно-артиллерийского комплекса, позволяющие автономно решать задачи наведения боеприпаса на цель [3,4]. Основная цель исследования – выяснить влияние различного рода погрешностей гироскопов и акселерометров на точность определения параметров ориентации и навигации бесплатформенной инерциальной навигационной системой высокодинамичного летательного аппарата.
Траектория движения летательного аппарата (ЛА)
Высокодинамичным летательным аппаратом является ракета ближней тактической зоны, траектория которой имеет активный и пассивный участки траектории. Общее время полета составляет 124 с, длительность активного участка траектории составляет 3 с, начальный угол тангажа составляет 55°. Исследование проводилось для двух вариантов движения ракетой относительно продольной оси:
-ЛА совершает гармонические колебания по крену с амплитудой 1° и частой 1 Гц;
-ЛА вращается по крену с частотой 10 Гц.
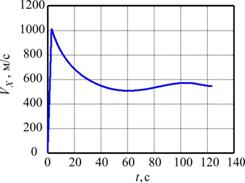
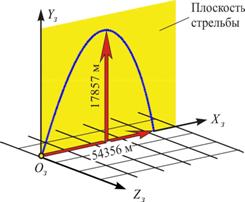
Основные параметры движения ракеты приведены на рис. 1. Так как дальность полета составляет ~55 км, то для описания положения центра масс ракеты использовалась прямоугольная земная система координат ![]() , начало
, начало ![]() которой находится в точке старта ЛА, ось
которой находится в точке старта ЛА, ось ![]() - направлена в плоскости горизонта
- направлена в плоскости горизонта  и направлена на цель, ось
и направлена на цель, ось ![]() - перпендикулярная плоскости горизонта и образует с осью
- перпендикулярная плоскости горизонта и образует с осью ![]() плоскость стрельбы
плоскость стрельбы  . (рис 1.)
. (рис 1.)
а) б)
В)
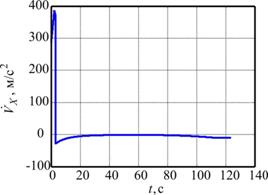 Рис. 1. Основные параметры движения ЛА:
Рис. 1. Основные параметры движения ЛА:
а – траектория движения;
б – продольная линейная скорость;
в – продольное ускорение
Гравитационное поле Земли предполагается нормальным плоскости горизонта ![]() , а суточное вращение Земли отсутствует. Схема моделирования погрешностей БИНС приведена на рис. 2
, а суточное вращение Земли отсутствует. Схема моделирования погрешностей БИНС приведена на рис. 2

На рис. 2 символами n и w обозначены векторы кажущегося ускорения и абсолютной угловой скорости ЛА, которые поступают в «идеальный» и «возмущенный» алгоритмы работы БИНС. Возмущенный алгоритм работы БИНС отличается от идеального наличием воздействий в виде погрешностей гироскопов Dw и погрешностей акселерометров dа. Выходом алгоритма идеальной работы БИНС являются векторы истинной скорости V и координат местоположения ЛА S в земной системе координат, выходом возмущенного алгоритма соответственно векторы ![]() и
и ![]() содержащие погрешности. Сравнение выходных сигналов алгоритмом позволяет найти погрешности БИНС
содержащие погрешности. Сравнение выходных сигналов алгоритмом позволяет найти погрешности БИНС ![]() ,
, ![]() .
.
Характеристиками точности попадания ЛА в заданную точку являются величины предельных отклонений точек падения ЛА от точки прицеливания по дальности и в боковом направлении, определяемые в естественной целевой системе координат. Начало целевой системы координат совмещается с точкой прицеливания, а по осям откладываются координаты отклонения по дальности ![]() и в боковом
и в боковом ![]() .
.
Влияние шума гироскопов
Большинство МЭМС-гироскопов потребительского класса имеют значение случайного блуждания угла (Angle Random Walk (ARW)) на уровне 0,02-0,06 °/Öc (соответственно плотность шума 0,02-0,06 °/с/ÖГц). Некоторые производители заявляют меньший уровень шума микромеханических гироскопов.
а) б)
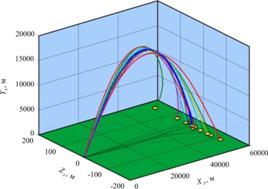
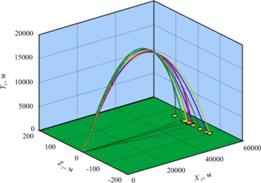
Рис. 3. Десять реализаций траектории полета ЛА при синусоидальном (а) и вращательном движении по крену (б)
На рис. 3 приведены десять возможных реализаций траекторий полета ЛА, вырабатываемые БИНС c уровнем шума гироскопов ARW = 0,02 ![]() при синусоидальном и вращательном движении ЛА по крену.
при синусоидальном и вращательном движении ЛА по крену.
На рис. 4 приведены эллипсы предельных отклонений для ЛА с вращением и без вращения ЛА.
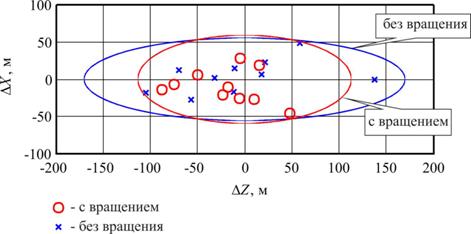
Рис. 4. Эллипсы предельных отклонений, вызванных наличием белого шума у гироскопов
Из анализа рисунков 3, 4 можно установить, что вращение ЛА по крену приводит к уменьшению рассеивания траекторий ЛА в боковом направлении. Это объясняется тем, что вращение ЛА приводит к усреднению шумовых погрешностей, содержащихся в выходном сигнале гироскопов.
В таблицах 1 и 2 приведены СКО (среднеквадратическое отклонение) погрешностей БИНС в определении линейной скорости и параметров ориентации.
Таблица 1 – СКО погрешностей в определении линейной скорости
(гармоническое колебание по крену / вращение по крену с частотой 10 Гц)
|
|
|
0,9197/0,4519 | 1,323/0,6004 | 2,167/1,232 |
Таблица 2 – СКО погрешностей в определении параметров ориентации
(гармоническое колебание по крену / вращение по крену с частотой 10 Гц)
|
|
|
0,615/0,425 | 0,306/0,1358 | 0,467/0,3065 |
Из анализа таблицы 1 следует, что СКО погрешности в определении скорости для вращающегося ЛА меньше в два раза аналогичных погрешностей не вращающегося ЛА.
Влияние погрешностей коэффициентов преобразования гироскопов
МЭМС-гироскопы подвержены температурным вариациям и поэтому их погрешности коэффициентов преобразования составляют 0,5–3 %, что в значительной степени влияет на вращающийся по крену ЛА.
Так, например, если погрешность коэффициента преобразования гироскопа ![]() составляет 1 %, то при частоте вращения ЛА в 10 Гц, она приводит к следующей ложной угловой скорости ЛА
составляет 1 %, то при частоте вращения ЛА в 10 Гц, она приводит к следующей ложной угловой скорости ЛА
![]()
Погрешность коэффициентов преобразования гироскопов равная 1 % для невращающегося (вращающегося) ЛА приведет к следующим отклонениям от точки прицеливания
- по дальности 86 м (1043 м);
- в боковом отклонении 11,6 м (2207 м).
Отсюда становится понятным, что к погрешностям коэффициентов преобразования гироскопов вращающегося ЛА предъявляется повышенные требования. Чтобы погрешность измерения угловой скорости крена имела порядок 100 - 10 °/ч, необходимо чтобы погрешность коэффициента преобразования составляла 10-3 – 10-4 %
Влияние неисключенных систематических погрешностей гироскопов
Неисключенные систематические погрешности гироскопов вызваны неточностью введения поправок, полученных в результате проведения предстартовой калибровки. При моделировании неисключенные постоянные систематические погрешности гироскопов задавалась в виде случайной величины распределенной по нормальному закону с нулевым математическим ожиданием и среднеквадратическим отклонением 20 °/ч (~ 10-4 рад/с). Результаты моделирования приведены на рис. 5.
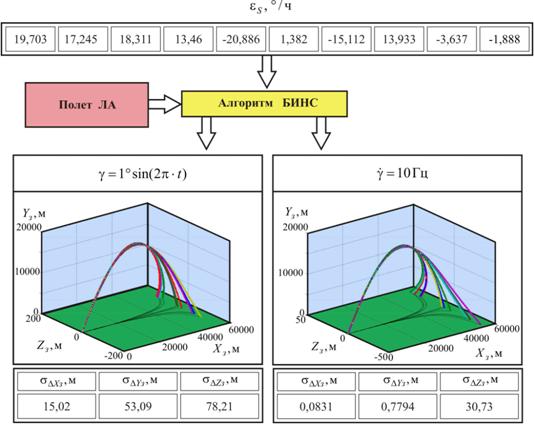
Рис. 5. Расчетные траектории БИНС, возмущенной неисключенными систематическими погрешностями гироскопов
Из рис. 5 следует, что постоянные систематические погрешности гироскопов в меньшей степени влияют на вращающийся ЛА, что также можно объяснить процессом усреднения при интегрировании кинематических уравнений БИНС.
Влияние нестабильности нуля гироскопов
Нестабильность нуля гироскопов вызывается 1/f – шумом, который обычно описывают с помощью случайного блуждания (угловой скорости), являющегося результатом пропускания порождающего белого шума через интегратор. Для реализации случайного блуждания с заданным СКО задавалось СКО порождающего белого шума исходя из формулы (1)
![]() (1)
(1)
где ![]() ,
, ![]() - СКО порождающего белого шума и угловой скорости,
- СКО порождающего белого шума и угловой скорости, ![]() - период дискретизации белого шума, t – время,
- период дискретизации белого шума, t – время,
В качестве t обычно принимается интервал времени, на котором наблюдается нестабильность нуля гироскопа, что в данном случае соответствует времени полета: t = 124 c. При моделировании задавалась нестабильность нуля гироскопов на уровне 50 °/ч, тогда СКО порождающего белого шума принималась исходя из соотношения (1)
Результаты моделирования БИНС с учетом нестабильности нуля на уровне 50°/ч приведены на рис. 6.
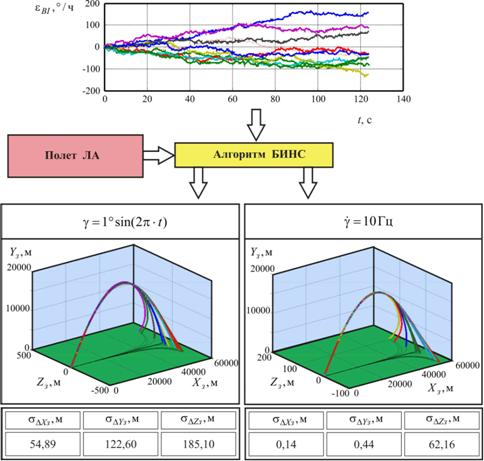
Рис. 6. Расчетные траектории БИНС, возмущенной нестабильностью нуля гироскопов
Рисунок 6 показывает, что БИНС вращающегося ЛА имеет меньшие погрешности по координатам, чем невращающийся ЛА. Эта особенность сохраняется и для параметров ориентации.
Влияние чувствительности гироскопов к перегрузкам
ММГ в силу особенности технологии МЭМС чувствительны к действию ускорений подвижного объекта (в англоязычной терминологии g-sensitivity) и большинство из них имеют погрешность на уровне 0,01 – 0,06 °/с/g по любой оси. При моделировании БИНС учитывалась только продольная перегрузка, а чувствительность гироскопов к ней задавалась как нормально распределенная случайная величина с нулевым математическим ожиданием и среднеквадратическим отклонением 0,01 °/с/g. Среднеквадратические отклонения погрешностей БИНС в определении координат представлены в таблице 3
Таблица 3 - СКО погрешностей БИНС в определении координат
(без вращения по крену/ с вращением по крену)
|
|
|
520,7/7,522 | 314,3/7,412 | 481,8/135,0 |
Чувствительность гироскопов к ускорениям приводит к резкому накоплению погрешностей БИНС на активном участке траектории, когда наиболее быстро происходит изменение скорости. Затем в некоторых случаях погрешность даже может снизиться за счет изменения знака ускорения
Влияние погрешностей акселерометров
При анализе точностных характеристик БИНС, вызванных погрешностями акселерометров принимались во внимание белый шум, нестабильность нуля и неисключенные систематические погрешности. Анализ результатов моделирования показал, что наибольший вклад в общую погрешность БИНС оказывают погрешности коэффициентов преобразования акселерометров. Погрешность коэффициента преобразования акселерометров принималась случайной величиной, распределенной по нормальному закону с нулевым математическим ожиданием и среднеквадратическим отклонением 0,3 %, что является типичным для ММА. В результате СКО погрешностей БИН по дальности составило 39 м в боковом направлении менее 1 м. Остальные погрешности имеют меньший порядок.
Заключение
Проведенный анализ показывает, что большинство погрешностей гироскопов при вращении ЛА по крену усредняется, что в итоге приводит к меньшим отклонениям по дальности и в боковом направлении по сравнению с невращающимся ЛА. Однако к погрешностям масштабных коэффициентов гироскопов для вращающегося ЛА необходимо предъявлять весьма жесткие требования, которые должны составлять 10-3 - 10-4 % , что является пока недосягаемым параметром для современной микромеханики потребительского класса. Отклонения вращающегося ЛА от точки прицеливания, вызванные нестабильностью масштабных коэффициентов ММГ в 1 %, значительно превзойдут все положительные эффекты, связанные с вращением по крену. Кроме того вращение ЛА по крену приводит к определенной специфике построения алгоритмов ориентации [3]. В связи с этим, скорее всего, следует отдать предпочтение невращающемуся варианту ЛА, либо аппарату с развязанным от вращения по крену аппаратным блоком [4].
Литература
1. Матвеев навигационные системы. учеб. пособие. Тула: Изд-во ТулГУ, 2012.-199 с.
2. В, Распопов построения бесплатформенных инерциальных навигационных систем: учеб. пособие. – СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009.-280с.
, , Алгоритм ориентации для вращающегося по крену летательного аппарата // Мехатроника, автоматизация, управление. №9. 2012. С. 5-9.
3. , Темляков направления развития артиллерийских высокоточных боеприпасов автономного применения// Оборонная техника. 2006. №1-2. C. 20-29.
