


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Лабораторная работа
Исследование импульсных систем управления
Цель работы: освоение методов анализа устойчивости и качества импульсных систем.
Теоретические сведения
8.3 Уравнения и передаточные функции импульсных систем управления
Если дискретная система задается разностным уравнением, то ее передаточные функции определяются аналогично передаточным функциям непрерывных систем. Отличие состоит только в том, что в случае дискретных систем вместо оператора дифференцирования ![]() используется оператор смещения
используется оператор смещения ![]() , который определяется следующим образом
, который определяется следующим образом  , а вместо преобразования Лапласа — Z-преобразование.
, а вместо преобразования Лапласа — Z-преобразование.
Пусть импульсная система задана разностным уравнением:
| (8.7) |

где  — выходная переменная;
— выходная переменная; ![]() — входная переменная.
— входная переменная.
В операторной форме это уравнение имеет вид:
 .
.
По аналогии с определением передаточной функции непрерывной системы, можно сформулировать: передаточная функция дискретной системы — это отношение операторов правой и левой частей разностного уравнения записанного в операторной форме:
| (8.8) |
 .
.Для того чтобы получить передаточную функцию дискретной системы в Z-изображениях (Z-передаточная функция) необходимо применить к обеим частям разностного уравнения (8.7), описывающего систему Z-преобразование:

Тогда при нулевых начальных условиях ![]() ,
, ![]() можно записать:
можно записать:
 ,
,
где  — Z-изображения выходной и входной переменных.
— Z-изображения выходной и входной переменных.
Примечание. Используется теорема линейности Z-преобразования [7]:
![]() .
.
И теорема опережения (Z-преобразование функции смещенной на целое число тактов) [7]:  , при нулевых начальных условиях:
, при нулевых начальных условиях:  .
.
Отсюда можно записать передаточную функцию в Z-изображениях как отношение Z-изображения выходной переменной к Z-изображению входной переменной:
| (8.9) |
 .
.Знаменатель передаточной функции в Z-изображениях является характеристическим полиномом дискретной системы управления:
 .
.
Таким образом, если дискретная система управления задана разностным уравнением, то передаточные функции вычисляются аналогично непрерывному случаю. Однако на практике известными являются характеристики дискретных элементов и передаточная функция непрерывной части системы управления.
Пусть импульсная система описывается структурной схемой приведенной на рис. 8.3, при этом известна передаточная функция непрерывной части системы ![]() .
.
Рис. 8.3. Обобщенная структурная схема замкнутой импульсной системы
Передаточная функция формирующего устройства, выполняющего амплитудно-импульсную модуляцию, имеет вид:
 .
.
В терминах Z-преобразований при переходе через формирующее устройство сигнал не изменяется:
 .
.
Тогда Z-передаточная функция разомкнутой системы:
Для получения Z-преобразования от выражения ![]() необходимо предварительно найти обратное преобразование Лапласа от этого выражения, затем сделать замену
необходимо предварительно найти обратное преобразование Лапласа от этого выражения, затем сделать замену  , и к полученному выражению применить прямое Z-преобразование:
, и к полученному выражению применить прямое Z-преобразование:
 .
.
Z-передаточная функция замкнутой системы находится по аналогии с непрерывными системами:
 .
.
Преобразования структурных схем импульсных систем управления. Преобразования структурных схем импульсных систем отличаются от структурных преобразований непрерывных систем управления.
В случае, когда непрерывная часть состоит из параллельно включенных звеньев и на входе имеется общее импульсное звено, дискретная передаточная функция может быть определена суммированием дискретных передаточных функции, определенных для каждого звена в отдельности:
 .
.
Если непрерывные звенья включены последовательно и имеется одно импульсное звено на входе, то дискретная передаточная функция такого соединения:
 .
.
В этом случае дискретная передаточная функция ![]() должна определяться Z-преобразованием от произведения передаточных функций непрерывной части системы:
должна определяться Z-преобразованием от произведения передаточных функций непрерывной части системы:
 .
.
Нельзя переносить сумматор или любое непрерывное звено через импульсный элемент. Непрерывную часть можно преобразовывать по известным правилам преобразования структурных схем непрерывных систем управления.
Для схем, состоящих из импульсных элементов, когда на входе каждого непрерывного звена стоит свой импульсный элемент, справедливы все правила преобразования структурных схем непрерывных систем.
8.4 Уравнения состояния импульсных систем управления. Решение уравнений состояния импульсных систем управления
Общий вид уравнений состояния для линейной дискретной системы [6]:
| (8.10) |
где ![]() — вектор состояния размерности
— вектор состояния размерности ![]() ;
; ![]() — вектор выхода размерности
— вектор выхода размерности ![]() ;
; ![]() — вектор входа размерности
— вектор входа размерности ![]() ;
; ![]() — матрица коэффициентов размерности
— матрица коэффициентов размерности ![]() ;
; ![]() — матрица входа размерности
— матрица входа размерности ![]() ;
; ![]() — матрица выхода размерности
— матрица выхода размерности ![]() ;
; ![]() — матрица, характеризующая непосредственную связь между входом и выходом системы размерности
— матрица, характеризующая непосредственную связь между входом и выходом системы размерности ![]() .
.
Установим связь между уравнениями состояния и Z-передаточной функцией дискретной системы. Для этого, используя теорему линейности Z-преобразования и теорему опережения, определим Z-преобразование первого уравнения (8.10) и запишем в векторно-матричной форме по аналогии с непрерывным случаем:
![]() ,
,
выразим ![]() :
:
| (8.11) |
при нулевых начальных условиях  получим:
получим:
 ,
,
где ![]() — единичная матрица.
— единичная матрица.
Найдем Z-преобразование второго уравнения (8.10) — уравнения выхода:
 .
.
Подстановка в последнее уравнение ![]() дает:
дает:
 ,
,
откуда следует, что система имеет передаточную функцию:
 .
.
Решение уравнений состояния импульсных систем управления. Решение уравнений (8.10) можно получить, применив к (8.11) обратное Z-преобразование.
Также для решения уравнений состояния (8.10) можно воспользоваться итерационным (рекуррентным) методом [6]. Считая, что ![]() и
и ![]() известны, можно решить первое уравнение (8.10) для
известны, можно решить первое уравнение (8.10) для ![]() , затем для
, затем для ![]() и т. д.:
и т. д.:
Следовательно, решение первого уравнения (8.10) можно выразить в общем виде:
| (8.12) |
 .
.По аналогии с непрерывным случаем можно записать фундаментальную матрицу для дискретной системы:
![]() .
.
Тогда решение (8.12) можно записать как:
 .
.
9. Анализ и синтез импульсных систем управления
9.1 Оценка устойчивости импульсных систем управления
Так же, как и в непрерывных системах, под устойчивостью импульсных систем понимается их способность с течением времени возвращаться в равновесное состояние после того, как это состояние было нарушено возмущающими воздействиями. Дискретных характер сигналов, передаваемых в импульсной системе, усложняет анализ импульсных систем, однако рассмотренное выше математическое описание передаточных функций импульсных систем позволяет анализировать импульсные системы аналогично непрерывным.
Корневой критерий устойчивости импульсных систем управления. Пусть дискретная система описывается неоднородным разностным уравнением:
| (9.1) |

Как отмечалось, общее решение неоднородного разностного уравнения имеет вид:
 ,
,
где — вынужденная составляющая — частное решение неоднородного разностного уравнения;
— вынужденная составляющая — частное решение неоднородного разностного уравнения;  — свободная составляющая — общее решение соответствующего однородного уравнения.
— свободная составляющая — общее решение соответствующего однородного уравнения.
Поскольку определение устойчивости системы проводится после снятия возмущений, то рассматривается свободное движение системы , т. е. решается однородное разностное уравнение соответствующее неоднородному уравнению (9.1):
| (9.2) |
Характеристическое уравнение системы соответственно имеет вид:
.
Линейная дискретная система управления является устойчивой, если общее решение однородного разностного уравнения (9.2) при  стремится к нулю:
стремится к нулю:
| (9.3) |
Если корни характеристического уравнения различные, т. е. не кратные, то свободная составляющая определяется выражением:
| (9.4) |
 ,
,где ![]() — постоянные, определяемые исходя из начальных условий.
— постоянные, определяемые исходя из начальных условий.
Если среди корней характеристического уравнения есть кратный корень ![]() кратности
кратности ![]() , то в (9.4) ему соответствует слагаемое:
, то в (9.4) ему соответствует слагаемое:
 .
.
Следовательно, условие (9.3) выполняется только в том случае, когда ![]() .
.
Таким образом, корневой критерий устойчивости импульсных систем управления: для устойчивости импульсной замкнутой системы необходимо и достаточно чтобы корни характеристического уравнения по модулю были <1, т. е. ![]() (лежали внутри окружности единичного радиуса на
(лежали внутри окружности единичного радиуса на ![]() плоскости).
плоскости).
Для того чтобы получить возможность использования для исследования устойчивости импульсных систем всех критериев устойчивости непрерывных систем, необходимо отобразить круг единичного радиуса с плоскости ![]() на левую полуплоскость некоторой новой переменной. Для этого можно воспользоваться преобразованием из теории функций комплексной переменной:
на левую полуплоскость некоторой новой переменной. Для этого можно воспользоваться преобразованием из теории функций комплексной переменной:
 .
.
Тогда окружность единичного радиуса на ![]() плоскости отображается в левую полуплоскость
плоскости отображается в левую полуплоскость ![]() , а внешняя часть окружности — в правую полуплоскость
, а внешняя часть окружности — в правую полуплоскость ![]() (рис. 9.1). Такое преобразование называется билинейным преобразованием.
(рис. 9.1). Такое преобразование называется билинейным преобразованием.
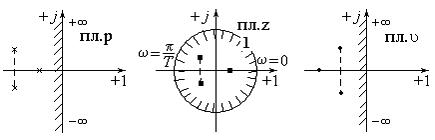
Рис. 9.1. Изображение корней характеристического уравнения на различных плоскостях
Частотный критерий устойчивости импульсных систем управления. Частотный критерий устойчивости импульсных систем аналогичен критерию устойчивости Найквиста для непрерывных систем, и позволяет судить об устойчивости замкнутой системы по АФЧХ разомкнутой системы [11].
Годограф АФЧХ разомкнутой импульсной системы строится путем формальной замены  в передаточной функции
в передаточной функции ![]() , итоге получаем частотную передаточную функцию импульсной системы
, итоге получаем частотную передаточную функцию импульсной системы  .
.
Если разомкнутая система устойчивая, то для устойчивости замкнутой импульсной системы необходимо и достаточно, чтобы годограф АФЧХ разомкнутой системы при изменении частоты ![]() от 0 до
от 0 до ![]() не охватывал точку (–1;j0) (частота дискретизации
не охватывал точку (–1;j0) (частота дискретизации ![]() ).
).
Если разомкнутая система неустойчивая, и ее передаточная функция  имеет
имеет ![]() неустойчивых корней, то замкнутая система будет устойчивой, если годограф разомкнутой системы охватывает точку (–1;j0) в положительном направлении
неустойчивых корней, то замкнутая система будет устойчивой, если годограф разомкнутой системы охватывает точку (–1;j0) в положительном направлении ![]() раз.
раз.
9.2 Оценка качества и точности импульсных систем управления
Проблема качества управления в дискретных, и в частности в импульсных, системах аналогична проблеме качества управления в непрерывных системах. При оценке качества управления импульсной системы необходимо построить переходной процесс, и определить показатели качества управления.
Построение переходного процесса дискретной системы управления. Пусть замкнутая дискретная система управления задана передаточной функцией:
 .
.
Первый способ построения переходного процесса основан на определении переходного процесса как реакции на единичное ступенчатое воздействие:
 ,
,
где  — Z-изображение единичной ступенчатой функции.
— Z-изображение единичной ступенчатой функции.
Второй способ основан на использование разностного уравнения, описывающего систему управления. Помножим числитель и знаменатель ![]() на
на ![]() . В результате получим:
. В результате получим:
 ,
,
где ![]() — Z-изображение выходного сигнала;
— Z-изображение выходного сигнала; ![]() — Z-изображение входного сигнала.
— Z-изображение входного сигнала.
Тогда по определению передаточной функции можно записать:

или
 .
.
Определяя обратные Z-преобразования от каждого слагаемого этого выражения, получим разностное уравнение:

Примечание. Используется теорема запаздывания (Z-преобразование функции смещенной в сторону запаздывания) [7]: ![]() .
.
Тогда выходной сигнал (переходной процесс):
 .
.
Оценка точности импульсных систем управления. Оценка точности непрерывных систем в установившемся режиме основана на теореме о конечном значении из преобразования Лапласа. Аналогичные результаты для импульсных систем можно получить на основании теоремы о конечном значении из Z-преобразования:
![]()
при условии, что предел в левой части существует. Последнее возможно только тогда, когда все полюсы ![]() расположены внутри единичной окружности, за исключением единственного полюса
расположены внутри единичной окружности, за исключением единственного полюса ![]() .
.
Рассмотрим импульсную систему, структурная схема которой представлена на рис. 9.2. Z-преобразование сигнала ошибки равно:
 .
.
Рис. 9.2. Структурная схема импульсной системы
По теореме о конечном значении из Z-преобразования установившаяся ошибка определяется выражением:
| (9.5) |
 .
.Рассмотрим сначала установившуюся ошибку, вызванную ступенчатым воздействием. В этом случае ![]() , где
, где ![]() — амплитуда ступенчатого воздействия. Тогда:
— амплитуда ступенчатого воздействия. Тогда:
 .
.
Если передаточная функция разомкнутой системы ![]() имеет порядок астатизма
имеет порядок астатизма ![]() , то
, то ![]() и установившаяся ошибка при ступенчатом входном сигнале равна нулю.
и установившаяся ошибка при ступенчатом входном сигнале равна нулю.
Если входной сигнал имеет вид линейной функции  , то
, то  . Согласно (9.5), установившаяся ошибка равна:
. Согласно (9.5), установившаяся ошибка равна:
 .
.
Если передаточная функция разомкнутой системы ![]() имеет порядок астатизма
имеет порядок астатизма ![]() , то коэффициент
, то коэффициент ![]() и установившаяся ошибка при линейном входном воздействии будет равна нулю.
и установившаяся ошибка при линейном входном воздействии будет равна нулю.
Установившаяся ошибка ![]() принимает вычисленные значения только в моменты квантования. Между моментами квантования установившаяся ошибка неизвестна и не может быть вычислена с помощью Z-преобразования, поскольку последнее связывает вход и выход системы только в моменты квантования.
принимает вычисленные значения только в моменты квантования. Между моментами квантования установившаяся ошибка неизвестна и не может быть вычислена с помощью Z-преобразования, поскольку последнее связывает вход и выход системы только в моменты квантования.
9.3 Типовые законы управления в дискретных системах
Провести улучшение качества и повышения точности дискретных систем управления можно с помощью типовых законов управления аналогичных типовым законам, используемым для управления в непрерывных системах.
В дискретном случае типовые законы управления описываются разностными уравнениями [3, 8].
Уравнение и передаточная функция пропорционального закона (П-закон) управления имеют вид:
 ,
,  .
.
Пропорционально-разностный закон (ПР-закон, аналог ПД-закона):
 ,
,
где  — обратная конечная разность, определяющая производную ошибки регулирования
— обратная конечная разность, определяющая производную ошибки регулирования ![]() .
.
Передаточная функция ПР-закона: ![]() .
.
Примечание. Используется теорема линейности и Z-преобразование конечных разностей [7]:
Пропорционально-суммарный закон (ПС-закон, аналог ПИ-закона):
 ,
,
где  — конечная сумма, определяющая интеграл от ошибки регулирования
— конечная сумма, определяющая интеграл от ошибки регулирования ![]() .
.
Передаточная функция ПС-закона: ![]() .
.
В импульсных системах для повышения точности в установившемся режиме обычно добавляют полюсы в точке ![]() и увеличивают тем самым порядок астатизма системы, либо изменяют в большую сторону коэффициент усиления системы. При этом конечно, необходимо сохранить приемлемые запасы устойчивости.
и увеличивают тем самым порядок астатизма системы, либо изменяют в большую сторону коэффициент усиления системы. При этом конечно, необходимо сохранить приемлемые запасы устойчивости.
Для повышения быстродействия системы полюсы замкнутой системы желательно располагать как можно ближе к началу координат z-плоскости.
Чтобы уменьшить перерегулирование в переходном процессе, необходимо увеличивать запасы устойчивости, что эквивалентно увеличению коэффициента затухания соответствующего доминирующим комплексным полюсам. Увеличение запасов устойчивости также приводит к уменьшению величины пика на амплитудно-частотной характеристике замкнутой системы.
Задания
Задание 1. Найти Z-передаточные функции разомкнутой и замкнутой импульсных систем. При этом предполагается, что импульсный элемент является первым звеном в разомкнутой цепи системы.
Задание 2. Построить переходные процессы непрерывной и импульсной систем и оценить качество управления по прямым показателям качества (перерегулирование, время регулирования, колебательность). Оценить влияние периода дискретизации ![]() на устойчивость и качество импульсной системы.
на устойчивость и качество импульсной системы.
Задание 3. В пакете Matlab Simulink промоделировать работу непрерывной и импульсной систем управления. Импульсный элемент моделируется блоком Zero-Order Hold из библиотеки Discrete, параметром является период дискретизации ![]() . Сравнить графики выходных сигналов
. Сравнить графики выходных сигналов ![]() непрерывной и импульсной систем. Оценить влияние периода дискретизации
непрерывной и импульсной систем. Оценить влияние периода дискретизации ![]() на устойчивость и качество импульсной системы.
на устойчивость и качество импульсной системы.
Задание 4. Построить модель импульсной системы управления в пространстве состояний. В качестве проверки правильности составленных уравнений состояния необходимо определить передаточную функцию замкнутой системы с помощью матриц  и сравнить с исходной, полученной в пункте 1. Если они не совпадают, следовательно, уравнения состояния составлены неверно.
и сравнить с исходной, полученной в пункте 1. Если они не совпадают, следовательно, уравнения состояния составлены неверно.
Задание 5. Решить уравнения состояния импульсной системы управления итерационным методом и с использование Z-преобразования. Построить график выходного сигнала ![]() при единичном ступенчатом входном воздействии и сравнить его с графиком переходного процесса замкнутой системы.
при единичном ступенчатом входном воздействии и сравнить его с графиком переходного процесса замкнутой системы.
Задание 6. Используя корневой критерий и частотный критерий устойчивости Найквиста оценить устойчивость импульсной системы.
Задание 7. Оценить точность импульсной системы в установившемся режиме: определить установившиеся ошибки системы на ступенчатое воздействие ![]() и на воздействие, имеющее вид линейной функции
и на воздействие, имеющее вид линейной функции  .
.
Задание 8. Сделать выводы по лабораторной работе.
Контрольные вопросы.
1. Типы сигналов и их преобразование. Решетчатые функции.
2. Достоинства и классификация дискретных систем управления.
3. Виды импульсной модуляции.
4. Передаточные функции импульсных систем управления.
5. Преобразования структурных схем импульсных систем управления.
6. Построение переходных процессов импульсных систем управления.
7. Уравнения состояния импульсных систем управления.
8. Решение уравнений состояния импульсных систем управления.
9. Корневой критерий устойчивости импульсных систем управления.
10. Частотный критерий устойчивости Найквиста импульсных систем управления.
11. Оценка точности импульсных систем.
