
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ТЕОРИЯ И КОНСТРУКЦИЯ
УНИВЕРСАЛЬНОГО ДВИЖИТЕЛЯ
инженера
г. Самара, 2013 год
Предисловие
С 2011 года, когда впервые была опубликована «Теория центробежного движителя», от читателей, познакомившихся с Теорией поступил ряд критических замечаний, которые заставили автора уточнить некоторые моменты, оставив суть Теории без изменения. После опубликования конструкции механизма, спроектированного на основании этой Теории, были еще замечания, которые вынудили автора более подробно описать конструкцию механизма, разработанную на основании предлагаемой Теории.
Универсальный центробежный движитель
Введение
Создать универсальный движитель, способный перемещать предметы в любой среде (по земле, воздуху, воде и в космосе) – такая мысль даже не приходила в голову инженерам с глубокой древности до наших дней. Для каждой среды отдельно были изобретены колесо, воздушный и гребной винт, ракета. Каждое из этих изобретений исправно выполняло поставленную перед ним задачу – перемещать предметы в своей среде. Наука ХХ века добросовестно помогала довести эти изобретения до совершенства, создавая различные теории, помогающие решению поставленных задач, пока не достигла критических параметров, когда дальнейшее усовершенствование конструкции не стоит тех затрат, которые уходят на это усовершенствование.
В 1945 году американская военная экспедиция к Антарктиде столкнулась с необъяснимым по тем временам явлением – из воды бесшумно вылетали непонятные объекты, которые с успехом разгромили американскую эскадру и она, собрав уцелевшие корабли, ушла домой. При этом ни один объект не был сбит, так как эти объекты летали вокруг эскадры бесшумно, на очень большой скорости и также бесшумно исчезли в воде.
Прошло более половины века. За это время инженеры начали пытаться создавать различные конструкции, чтобы хоть как-то приблизиться к решению задачи по созданию универсального движителя. Появились конструкции инерцоидов, католетов и центробежных движителей, но это были конструкции в основном пригодные для какой-то одной среды и, как правило, не очень удачные, поскольку даже в своей среде они не делали революции.
Родоначальниками инерцоидов признаны Владимир Николаевич Толчин (Пермь, 1936 год) и (патент США года), а в качестве теоретиков, объясняющих принцип действия инерцоидов, надо отметить выдающихся физиков Евгения Андреевича Ларикова (Объединение «Ариэль»),
, Александра Викторовича Каравайкина (до 1998 года рук. лаборатории «Вега») и Геннадия Ивановича Шипова (МГУ).
Анализируя рассказы участников американской экспедиции, невольно возникает вопрос, за счет чего и как перемещаются в пространстве эти объекты? Ну, допустим, энергии как у подводных лодок, у них может быть в избытке, но никакого винта для перемещения в воде и воздухе американцы не заметили. Получается, что объекты перемещаются в воздухе и воде за счет внутренних сил. Но современная наука отрицает перемещение в пространстве за счет внутренних сил, – для этого сконструирована ракета. Но признаков ракеты на объектах американцы тоже не обнаружили. Парадокс!
В своей книге «Тайна тяготения» д. т.н., профессор В. Меньшиков, директор НИИ КС, отметил: «Энергетические параметры существующих реактивных двигателей уже почти приблизились к своему пределу, возможности их совершенствования практически исчерпаны, и даже незначительное улучшение энергомассовых и экологических характеристик таких двигателей требует больших временных, технологических и финансовых затрат. Реактивные двигатели (как силовые, так и исполнительные) при длительной работе потребляют большое количество топлива, на один-два порядка превышающее вес самих двигателей, в частности, необходимость в обеспечении их большими запасами топлива, в будущем могут создать большие проблемы в освоении дальнего космоса».
О принципе работы инерцоида
Попробуем проанализировать работу инерцоида .
При вращении грузы в его конструкции совершают поворот вокруг двух осей – центральной и второй оси (на которой закреплены грузы), вращающейся вокруг центральной оси с торможением грузов на определенных углах вращения вокруг центральной оси. При этом грузы совершают вращательно-колебательные движения по продольной оси конструкции, что при определенных условиях заставляет рывками перемещаться всю конструкцию вдоль ее продольной оси. Такая конструкция не работает при больших оборотах и не создает односторонней, постоянно действующей силы – тяги – для перемещения конструкции вдоль продольной оси в одну сторону.
Попробуем разобраться в причинах такого поведения конструкции.
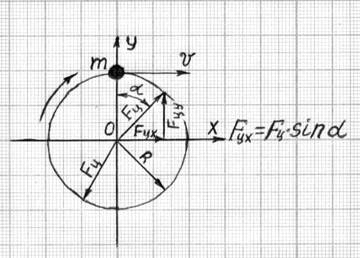
Рис.1
Если мы возьмем грузик m, привяжем его к нити и раскрутим, то от вращения грузика возникает центробежная сила, которая будет действовать во все стороны одинаково.
А можно ли создать конструкцию, в которой центробежная сила от вращения груза действовала бы только в одну сторону? В науке до настоящего времени существует не решенная проблема разделения двух противонаправленных сил.( - В поисках инерцоида). Для решения этой проблемы автором была предложена теория преобразования одного полного оборота вращательного движения в односторонний синусоидальный импульс и разработана простая конструкция механизма для создания постоянно действующей односторонней силы, получаемой прямым преобразованием вращательного движения в постоянное одностороннее прямолинейное движение.
История возникновения
теории преобразования одного полного оборота вращательного движения
в односторонний синусоидальный импульс
Согласно законам Ньютона центробежная сила возникает при вращении тела вокруг оси и равна
![]()

![]()
где Fц – центробежная сила;
m – масса тела ≈ 0,1 веса тела;
R – радиус вращения (расстояние от оси вращения до центра тяжести тела);
n – обороты, с которыми вращается тело.
При вращении тела вокруг точки О, центробежная сила по радиусу вращения действует во все стороны.
Для создания центробежного движителя (не путать с двигателем) – необходимо, чтобы центробежная сила, создаваемая вращающимся вокруг оси телом, действовала только в одну сторону.
Согласно устоявшемуся в настоящее время положению в науке, создание движителя, перемещающего тело за счет «внутренних» сил, противоречит законам физики И. Ньютона, которые рассматривают взаимодействие сил в одной системе координат. Даже в Комитете по изобретениям еще со времен СССР вышло распоряжение об отказе регистрации изобретений инерцоидов и вечных двигателей.
Кто же будет спорить с официальной точкой зрения Системы? Законы нужно выполнять. Итак, тупик?
Но, если со вторым положением можно согласиться (хотя бы потому что все изнашивается), то с первым... Подождем!
Распоряжение распоряжением, а творческая мысль инженеров-изобретателей продолжает работать. В связи с этим вспоминается статья «Одной головы достаточно» (журнал «Изобретатель и рационализатор» №8 за 1977 год), в которой приводится статистика американского журнала «Парейд», который говорит о том, что за 1975 год «…из 60 наиболее важных открытий и изобретений 41 новшество сделано изобретателями-одиночками, которые работают где-нибудь на чердаках или в сарае, а не НИИ и корпорациями, поглощающими огромные средства на разработку идей».
Когда у творческого человека возникает какая-нибудь идея, о которой он постоянно думает, его мозг автоматически, на уровне подсознания, собирает информацию всегда и везде. Иногда случайно услышанная или прочитанная мысль запоминается и всплывает в нужное время. Так было и со мной.
В связи с этим приведу 4 из отложившихся у меня в памяти мысли, которые помогли созданию «Теории преобразования одного полного оборота вращательного движения в односторонний синусоидальный импульс» и на основании ее спроектировать пространственно-временной механизм по преобразованию энергии вращательного движения в одностороннее поступательное.
Из статьи в журнале «Техника молодежи» №4 за 1969 год, профессора, д. т.н. О. Чембровского «Силой волн к звездам»:
1) «Даже при пульсирующей нагрузке можно заставить «замкнутую систему» испускать корпускулы преимущественно в одном направлении. Для этого нужно поворачивать рабочее тело на 180° в те моменты, когда сила достигла максимума и пошла на убыль».
2) «Конструктор должен с вниманием отнестись к высокоупругим материалам и, возможно, к пружинам».
3) «Если внутри систем возникают процессы, приводящие к асимметрии поля, начинает действовать обобщенный закон сохранения количества движения».
(Следовательно, поиски безопорных движителей-устройств, перемещающихся только за счет внутренних, «классических» сил, не так бессмысленны, как это кажется на первый взгляд).
4) Из ответа А. Эйнштейна на статью Рейхенбекера (собрание научных трудов А. Эйнштейна т. 1, стр. 691, изд-во «Наука», Москва, 1965г): «…пример гравитационных полей, исчезающих при преобразовании координат, имеют значение только как известный нам частный случай, в котором искомые законы природы заведомо выполняются».
Все вышеуказанное, и особенно ответ А. Эйнштейна, натолкнуло меня на такое предположение (прошу физиков-теоретиков извинить меня, они, наверное, знают об этом давно): если гравитационные поля могут исчезать при преобразовании координат, то и преобразованием координат можно создать гравитационное поле.
При создании гравитационного поля необходимо, чтобы создаваемое при преобразовании координат гравитационное поле было направлено в одну, нужную сторону.
Не знаю, насколько справедлива первая часть этой теории (я инженер-механик по авиационным двигателям, пусть физики-теоретики продолжают споры с теориями господина А. Эйнштейна), а вот вторая часть моего предположения – чисто инженерная задача. Итак, центробежная сила
![]() .
.
Для создания конструкции любого изделия (двигатель, машина, трактор, самолет и т. д.) выдается ТЗ (техническое задание) с многими требованиями, в числе которых: вес изделия (его масса) и его частей, какие-то обороты вращающихся деталей n, габариты изделия, в числе которых может быть и радиус R вращающихся частей изделия и многое другое.
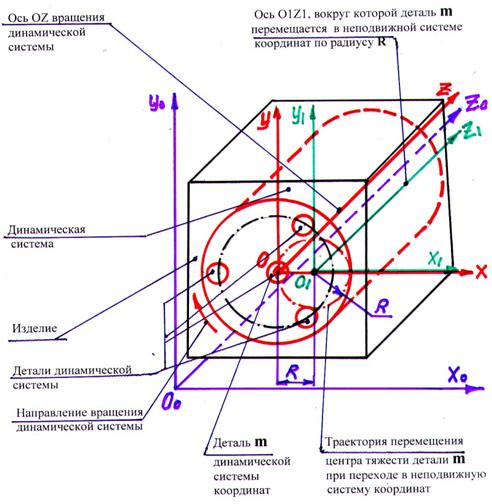
Рис.2
Имеем центральную (основную) систему координат O0X0Y0Z0, в которой находится Изделие, состоящее из ряда деталей, находящихся в двух системах координат:
1. динамической (OXYZ), обеспечивающей вращение части составляющих ее деталей вокруг оси системы координат OZ;
2. неподвижной (O1X1Y1Z1), смещенной относительно динамической системы на величину R.
В число деталей динамической системы входит и деталь (детали) m, отцентрированная относительно оси OZ, и, которая может вращаться вокруг оси OZ, а при помощи специального пространственно-временного механизма, входящего в состав Изделия, и связывающего динамическую систему координат с неподвижной, перемещаться по траектории, описываемой радиусом R относительно оси O1Z1).
Если мы, в соответствии с вышеизложенным предположением, при помощи специального пространственно-временного механизма, заставим деталь (детали) m в течение первой половины оборота динамический системы совершить половину оборота вокруг оси OZ, а во вторую половину оборота динамический системы совершить половину оборота вокруг оси O1Z1 (т. е. заменим систему координат детали m), то, вращаясь половину оборота вокруг оси OZ, деталь m никаких центробежных сил не создаст, так как ее ось и центр тяжести совпадут с осью OZ динамической системы координат, а вот перемещаясь по радиусу R, т. е. двигаясь уже в другой системе координат, и совершая при помощи специального пространственно-временного механизма пол-оборота вокруг оси O1Z1, деталь m создаст центробежную силу, но эта центробежная сила по отношению к оси OZ Изделия и основной системе координат, будет всегда направлена в одну сторону – по оси O0X0, так как центр тяжести детали m при вращении вокруг оси OZ и перемещении по траектории радиуса R, никогда не пересекает ось OY динамической системы координат поэтому под действием центробежных сил Fцx Изделие переместится вдоль оси O0X0, а переменные силы по оси O1Y1 (от +Fцy до –Fцy) взаимоуничтожаются с помощью того же пространственно-временного механизма.
Из вышеизложенного следует, что при смене координат одной (или несколькими) деталью динамической системы, за первую половину оборота этой системы создается один (или несколько) синусоидальный пульсирующий импульс центробежной силы, длительностью, равной времени, в течение которого динамическая система сделает половину оборота, и этот импульс (импульсы) всегда направлен в одну сторону. А во вторую половину оборота динамической системы центробежной силы нет, так как ось вращения детали m и ее центр тяжести совпадают с осью OZ динамической системы, что и подтверждает мысль А. Эйнштейна и предлагаемую теорию, которую в конечном виде можно сформулировать так:
Теория преобразования одного полного оборота вращательного движения в односторонний синусоидальный импульс
В Изделии, имеющем ряд деталей и состоящим из двух систем координат, динамической и неподвижной, за один оборот динамической системы координат, деталь (детали) m, входящая в состав динамической системы координат, и при помощи пространственно-временного механизма перемещаемая в неподвижную систему координат, в течение первой половины оборота динамической системы создает центробежную силу, направленную только в одну сторону от оси вращения динамической системы координат, а в течение второй половины оборота динамической системы при перемещении этой же детали (деталей) из неподвижной системы координат в центр вращения динамической системы координат, центробежная сила от перемещения детали (деталей) m исчезает, потому что центр тяжести детали (деталей) m совпадает с осью симметрии детали, осью вращения динамической системы и началом движения по траектории радиуса R, и с этого момента окружная скорость центра тяжести детали m и время движения по траектории, описываемой радиусом R , равны нулю в течение всей второй половины оборота динамической системы.
Силы, возникающие в направлении оси ОY, взаимоуничтожаются элементами пространственно-временного механизма.
Примечание: примером пространственно-временного механизма являются старинные настенные часы, в которых прямолинейное движение гирьки под действием гравитации (силы тяжести) преобразуется в импульсное вращательное движение стрелок. Это вращательное движение строго привязано к пространству (циферблату часов) и времени (за определенный промежуток времени стрелки переместятся на определенную величину пространства (циферблата).
В разработанной автором конструкции пространственно-временного механизма, наоборот, нормальное вращение любого двигателя преобразуется в постоянное прямолинейное движение всего Изделия в одну, нужную сторону. Отсюда следует, что мысль профессора О. Чембровского о возможности создания устройств, перемещающихся за счет внутренних “классических” сил может быть претворена в жизнь с помощью пространственно-временного механизма.
Описание конструкции «Механизма РАНча
для прямого преобразования вращательного движения
в постоянное, одностороннее, прямолинейное»
Основанием для разработки конструкции механизма явилась статья автора «Попытка примирить И. Ньютона и А. Эйнштейна - О центробежном движителе», опубликованная 5 июня 2011 года в интернете, (http://inertia. ucoz. ru/index/o_centrobezhnom_dvizhitele/0-45), отредактированная, в выше изложенном виде, где предложена «Теория преобразования одного полного оборота вращательного движения в односторонний синусоидальный импульс». При наличии нескольких деталей m, (начиная с трех и более) обеспечивается получение постоянной односторонней силы, действующей в нужном направлении. Предлагаемая конструкция механизма содержит четыре детали m – это ползун, позиция 9 на рис. 3.
Описанная теория и предлагаемая конструкция могут служить основой для разработки простого антигравитационного движителя.
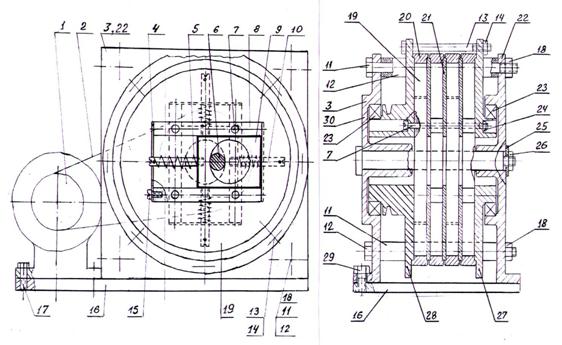
Рис.3
На основании (поз.16) винтами (поз.29) закреплены стойки поз.3 и поз.22, которые скреплены между собой через 4 распорные втулки поз.12 болтами поз.11 и гайками поз.18.
В стойках поз.3 и поз.22 на двух подшипниках поз.23 вращается барабан поз.19, состоящий из дисков поз.28 и поз.27, которые скреплены между собой болтами поз.13 и гайками поз.14. Между дисками поз.28 и поз.27 находятся 4 кольца поз.20, между которыми вставлены 3 диска поз.21 с отверстиями, через которые проходит вал поз.6, удерживаемый от перемещения шайбой поз.25 и гайкой поз.26.
В пространстве между дисками поз.28, поз.27 и поз.21, вставлены по 2 направляющих поз.8, между которыми перемещается ползун поз.9 с отверстием. При вращении барабана поз.19 вместе с дисками и направляющими ползун поз.9 под действием пружины поз.5 постоянно прижимается к валу поз.6, обеспечивая одностороннее смещение ползуна с оси вращения барабана при его вращении. К направляющим поз.8 (по 2 штуки в каждом зазоре) с одной стороны винтами поз.15 крепится пластина поз.4 для упора пружины. Пружина для устойчивости центрируется на шпильке поз.10, которая вворачивается в торец ползуна, а второй конец шпильки входит в отверстие упорной пластины поз.4.
Вращение барабана осуществляется двигателем поз.1 через ременную или цепную передачу поз.2 и шкив или зубья на диске поз.28.
На основании (поз.16) винтами (поз.29) закреплены стойки поз.3 и поз.22, которые скреплены между собой через 4 распорные втулки поз.12 болтами поз.11 и гайками поз.18.
В стойках поз.3 и поз.22 на двух подшипниках поз.23 вращается барабан поз.19, состоящий из дисков поз.28 и поз.27, которые скреплены между собой болтами поз.13 и гайками поз.14. Между дисками поз.28 и поз.27 находятся 4 кольца поз.20, между которыми вставлены 3 диска поз.21 с отверстиями, через которые проходит вал поз.6, удерживаемый от перемещения шайбой поз.25 и гайкой поз.26.
В пространстве между дисками поз.28, поз.27 и поз.21, вставлены по 2 направляющих поз.8, между которыми перемещается ползун поз.9 с отверстием.
При вращении барабана поз.19 вместе с дисками и направляющими ползун поз.9 под действием пружины поз.5 постоянно прижимается к валу поз.6, обеспечивая одностороннее смещение ползуна с оси вращения барабана при его вращении. К направляющим поз.8 (по 2 штуки в каждом зазоре) с одной стороны винтами поз.15 крепится пластина поз.4 для упора пружины. Пружина для устойчивости центрируется на шпильке поз.10, которая вворачивается в торец ползуна, а второй конец шпильки входит в отверстие упорной пластины поз.4.
Вращение барабана осуществляется двигателем поз.1 через ременную или цепную передачу поз.2 и шкив или зубья на диске поз.28.
Особенности конструкции
Начальное положение ползуна (момент создания максимальной центробежной силы одним из четырех ползунов) изображено на рис.3. В это время центры тяжести остальных ползунов совпадают с осью вращения динамической системы и не создают никаких центробежных сил. В каждом зазоре барабана поз.19 находятся по 2 направляющих поз.8, которые расположены симметрично относительно оси вращения барабана. Болтами поз.7 и гайкой поз.24 направляющие поз.8 связывают диски поз.28, 21 и 27. Каждая следующая пара направляющих повернута относительно друг друга со смещением по часовой стрелке на 90 градусов.
Между двумя направляющими поз.8 перемещается ползун поз.9, движение которого ограничено валом поз.6, к которому ползун постоянно прижимается пружиной поз.5.
При вращении барабана поз.19 с дисками и направляющими, ползун поз 9, увлекаемый дисками и направляющими поз.8 обкатывается вокруг вала поз.6, но центр тяжести ползуна никогда не пересекает вертикальную ось Y, так как отверстие ползуна всегда равно: D = 2(d + х),
где D – диаметр отверстия ползуна, деталь позиция 9 на Рис. 3;
d – диаметр вала поз.6;
х – расстояние от оси вращения дисков (ось динамической системы) до вала поз.6 (Рис.4).
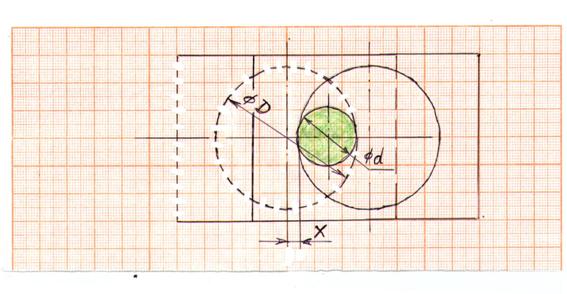
Рис.4
Рассмотрим, как работает механизм.
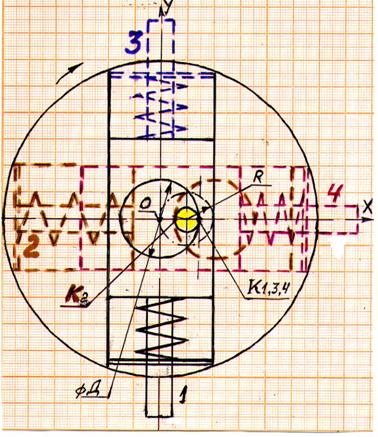
Рис.5
На Рис.5 показано положение, когда один из ползунов (1-черный), заканчивает вращение вокруг оси динамической системы (точка О), не создавая никаких центробежных сил, так как центр тяжести ползуна, совпадает с осью вращения динамической системы в точке О, и с этого момента начинает переход в неподвижную систему координат.
Пунктиром показано положение остальных трех ползунов, в том числе:
2-коричневый, находясь в неподвижной системе координат, создает максимальную центробежную силу, соприкасаясь с валом в точке К2, а 3-синий и 4-красный, центры тяжести которых совпадают с точкой О – осью вращения динамической системы, никаких центробежных сил не создают и также, как 1-черный, соприкасаются с валом в точке К1,3,4.
Поворачиваем диск на 45 градусов (Рис.6).
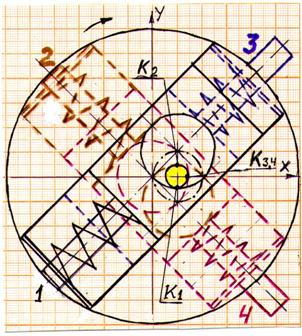
Рис.6
В этот момент ползуны занимают следующее положение:
1-черный смещается с оси вращения динамической системы, и, обкатывая вал в точке К1, создает центробежную силу Fц;
2-коричневый, находясь в неподвижной системе координат, и соприкасаясь с валом в точке К2, уменьшает действие максимальной центробежной силы;
3-синий и 4-красный, соприкасаясь с валом в точке К3,4, центрами тяжести совмещаются с осью динамической системы, от них центробежные силы пропадают.
Рассмотрим действие сил в положении, указанном на Рис. 6, сопровождающих этот момент (Рис.7 и Рис.8):
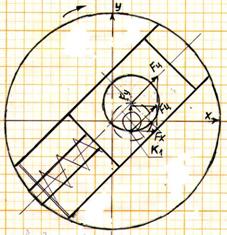
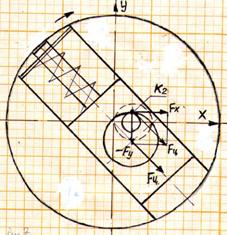
Рис.7 Рис.8
Для 1-черного ползуна: центробежная сила от вращения ползуна в точке контакта К1 с валом разлагается на Fx и + Fy (Рис.7).
Для 2-коричневого ползуна: центробежная сила от вращения ползуна в точке контакта К2 с валом разлагается на Fx и – Fy (Рис.8). Fx от черного и коричневого ползунов складываются, а Fy от них – взаимоуничтожаются.
Для 3-синего и 4-красного: их центры тяжести совпадают с осью вращения динамической системы и в точке контакта К3,4 обкатывают вал, не создавая никаких центробежных сил (Рис.6).
Поворачиваем барабан еще на 45 градусов по часовой стрелке (Рис.9).
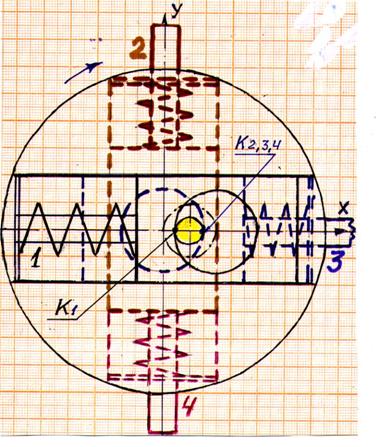
Рис.9
В этот момент ползун 1-черный, находясь в неподвижной системе координат, касаясь вала в точке контакта К1, создает максимальную центробежную силу, остальные ползуны, касаясь вала в точке К2,3,4 свои центры тяжести совмещают с осью вращения динамической системы и никаких центробежных сил не создают.
Поворачиваем барабан еще на 45 градусов (Рис.10).
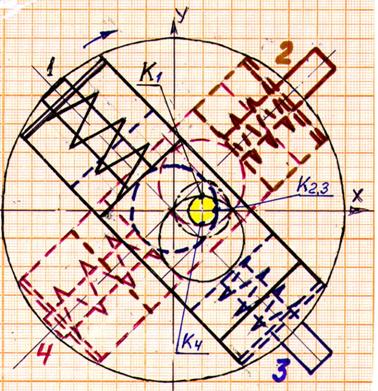
Рис.10
В этот момент ползуны занимают следующее положение:
1-черный, касаясь вала в точке К1, находясь в неподвижной системе координат, уменьшает действие центробежной силы;
4-красный, касаясь вала в точке К4, начинает создавать центробежную силу, переходит в неподвижную систему координат;
Fx от 1-черного и 4-красного складываются, Fy от них – взаимоуничтожаются;
2-коричневый и 3-синий, касаясь вала в точке К2,3 свои центры тяжести совмещают с осью динамической системы (точка О), переходят в динамическую систему координат и никаких центробежных сил не создают.
Поворачиваем барабан еще на 45 градусов (Рис.11).
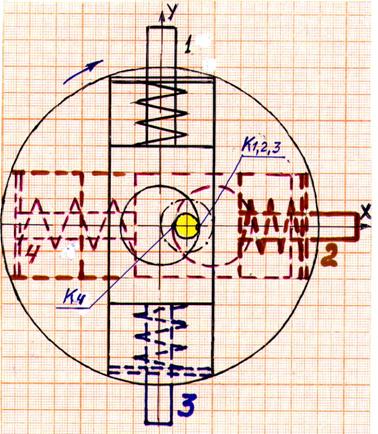
Рис.11
В этот момент 4 - красный ползун, находясь в неподвижной системе координат, создает максимальную центробежную силу, касаясь вала в точке К4, остальные ползуны, касаясь вала в точке К1,2,3, совмещая свои центры тяжести с осью вращения динамической системы (точка О), перешли в систему координат динамической системы и никаких центробежных сил не создают.
Поворачиваем барабан еще на 45 градусов (Рис.12).
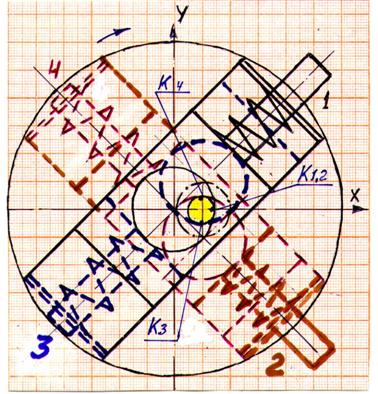
Рис.12
В этот момент ползуны занимают следующее положение:
4-красный, касаясь вала в точке К4, находясь в неподвижной системе координат, уменьшает центробежную силу;
3-синий, касаясь вала в точке К3, начинает создавать центробежную силу, переходя из динамической системы координат в неподвижную;
Fx от 4-красного и 3-синего складываются, Fy – от них взаимоуничтожаются;
1-черный и 2-коричневый, касаясь вала в точке К1,2, переходят в динамическую систему координат и никаких центробежных сил не создают.
Поворачиваем барабан еще на 45 градусов (Рис.13).
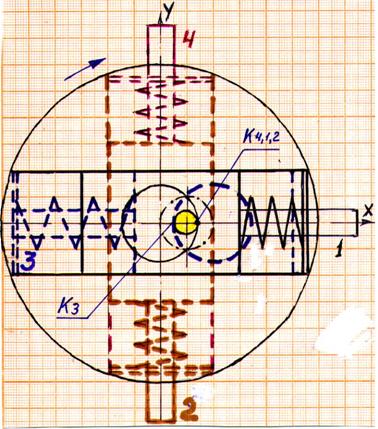
Рис. 13
В этот момент 3-синий ползун, находясь в неподвижной системе координат, создает максимальную центробежную силу, касаясь вала в точке К3, остальные ползуны, касаясь вала в точке К4,1,2 никаких центробежных сил не создают, так как их центры тяжести совмещены с осью вращения динамической системы.
Поворачиваем барабан еще на 45 градусов ( Рис.14).
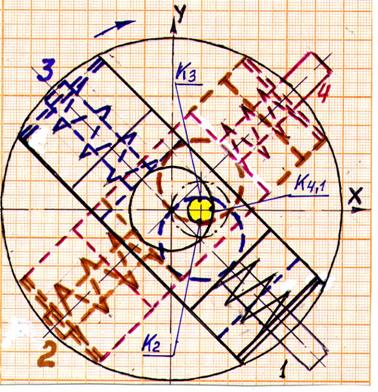
Рис.14
В этот момент ползуны занимают следующее положение:
3-синий ползун, находясь в неподвижной системе координат, касаясь вала в точке К3, уменьшает центробежную силу;
2-коричневый ползун, касаясь вала в точке К2, начинает создавать центробежную силу, переходя в неподвижную систему координат;
4-красный и 1-черный ползуны, касаясь вала в точке К4,1, переходят в динамическую систему координат, их центры тяжести совмещаются с осью вращения динамической системы координат и они никаких центробежных сил не создают.
При дальнейшем повороте барабана на 45 градусов ползуны занимают положение, указанное на Рис.5.
Для уменьшения трения скольжения ползуна о направляющие и внутреннего отверстия ползуна о вал можно на вал и боковые поверхности ползуна посадить подшипники (заменить трение скольжения на трение качения) (Рис.15).
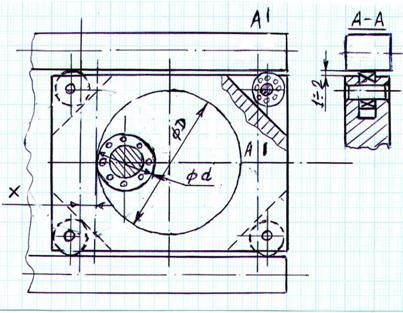
Рис.15
Построим графики изменения сил, возникающих от вращения ползуна. Сам ползун приводится во вращение относительно оси дисков и оси вала за счет того, что направляющие, закрепленные на дисках, перемещают его за боковые поверхности, а пружина постоянно прижимает его к валу.
От одного ползуна возникают силы (Рис.16).
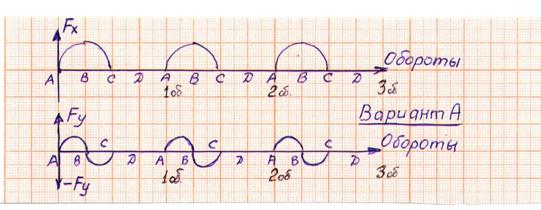
Рис.16
От второго ползуна возникают силы (Рис.17).
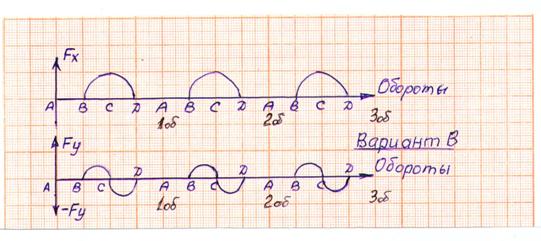
Рис. 17
От третьего ползуна возникают силы (Рис.18).
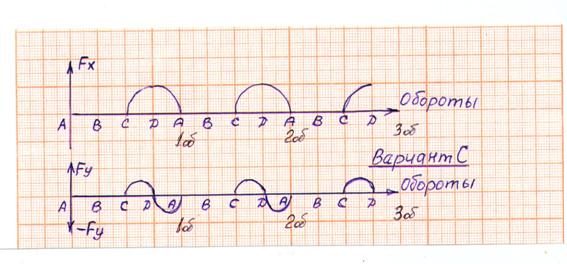
Рис.18
От четырех ползунов, расположенных друг за другом, со смещением на 90 градусов по часовой стрелке, силы будут такими (Рис.19).
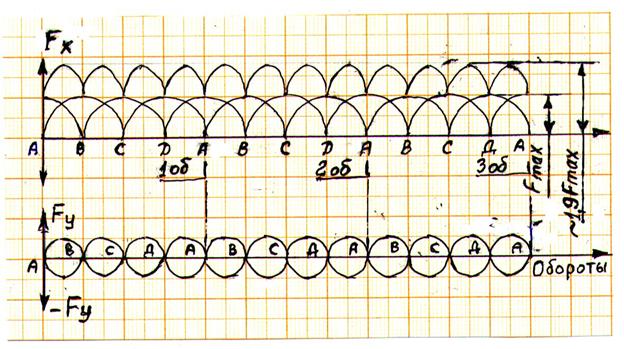
Рис.19
То есть, мы имеем постоянную одностороннюю силу по оси Х, но ее величина 4 раза изменяется от Fх max до 1,9 Fх max в течение одного оборота барабана с дисками.
Попробуем рассмотреть, а за счет чего и откуда берутся силы для перемещения Изделия по оси О1X1 при вращении детали m (ползуна) вокруг оси О1Z1.
1. При вращении барабана с дисками 4 раза в течение одного оборота происходит одностороннее изменение (увеличение-уменьшение) радиуса вращения детали m от нуля до Rmax и до нуля, а во второй половине оборота R равен нулю.
2. Происходит 4 раза за один оборот одностороннее изменение (увеличение-уменьшение) массы вращающегося диска за счет изменения (увеличения-уменьшения) радиуса вращения детали m.
3. Происходит 4 раза за один оборот одностороннее изменение (увеличение-уменьшение) момента инерции дисков за счет одностороннего изменения (увеличения-уменьшения) радиуса R вращающейся массы.
Попробуем рассчитать силы, возникающие при вращении ползунов.
Исходные данные для расчета:
- ползун весом 1 кГ имеет габариты 110х70х21 мм, отверстие диаметром D=50 мм;
- радиус вращения центра тяжести ползуна R=15 мм, диаметр вала 20мм;
- объем ползуна V=110х70х21 – 3,14х15х15х21=132164 мм3=132 см3;
- вес стального ползуна равен 132х7,8=1030 Г ≈ 1 кГ. Масса ползуна m ≈ 0,1 кг.
1 Н = 1 кг м/сек2 . 1 Н ≈ 0,1 кГ =1/9,8 кГ.
Fц = 39,4mRn2
Расчет ведется для оборотов n = 1000, 10000, 20000, 30000 об/мин.
n = 1000 об/мин. = 16,7 об/сек. n2 = 278 об/сек2,
n = 10000 об/мин. = 167 об/сек. n2 = 27889 об/сек2,
n = 20000 об/мин. = 333 об/сек. n2 = 110889 об/сек2,
n = 30000 об/мин. = 500 об/сек. n2 = 250000 об/сек2.
Fц 1000 = 39,4х0,1х0,015х278 = 16,4 кг. м/сек2 = 16,4 Н =1,64 кГ.
Fц 10000 = 39,4х0,1х0,015х27889 = 1648 кг. м/сек2 = 1648 Н =164,8 кГ.
Fц 20000 = 39,4х0,1х0,015х110889 = 6554 кг. м/сек2 = 6554 Н = 655 кГ.
Fц 30000 = 39,4х0,1х0,015х250000 = 14775 кг. м/сек2 = 14775 Н = 1447,5 кГ.
В связи с тем, что время колебания центробежной силы от Fх max до 1,9Fх max очень мало, фактическая величина центробежной силы составит ≈1,45Fх max.
Применение центробежных движителей значительно сократит вес летательных аппаратов за счет того, что потребляемая энергия будет расходоваться только на вращение барабанов с дисками и ползунами с оборотами от 1000 до 10000–30000 оборотов в минуту в зависимости от массы вращаемых деталей и нужной тяги.
При установке на движитель Устройства Управления Величиной и Направлением Тяги (УУВНТ), аппарат c такими движителями может зависать в любой среде, моментально изменять величину и направление тяги до отрицательной такой же величины (для автоматических аппаратов, человек больше 10g не выдержит!), управляемый простым штурвалом.
В зависимости от назначения аппарата, движитель с УУВНТ может иметь несколько модификаций:
1. Для автомобиля, катера нужен один движитель, обеспечивающий максимальные обороты и изменение тяги в пределах от Fx max до –Fx max в одном направлении. При расчете динамики автомобиля учитывать дополнительную боковую составляющую центробежной силы, возникающую при повороте автомобиля.
2. Для подводной лодки и летательных аппаратов нужно от двух до шести движителей, обеспечивающих холостой ход, и изменение тяги во всех направлениях (вперед - назад, вверх - вниз, влево - вправо) с изменением тяги на каждом движителе в пределах от +Fmax до –Fmax во всех направлениях.
Еще cо времен школы (опыт Толмена и Стюарта) мы знаем, что любое быстро вращающееся металлическое тело – это центрифуга для электронов. Они под действием центробежной силы отбрасываются к ободу диска. С позиций электротехники и электродинамики все быстро вращающиеся металлические тела являются одновитковыми короткозамкнутыми контурами. Благодаря огромным токам, протекающим в них, создается магнитное поле, направление которого зависит от того, в какую сторону вращается диск.
Это еще одно направление возможного применения вышеуказанной Теории?!!!.
Источники информации:
1.Физика для всех – , , Наука, Москва,1965 г.
2.А. Эйнштейн – Собрание научных трудов, том 1, Наука, Москва,1965 г.
3.Тайна тяготения – , , НИИ КС, 2007 г.
4. – Инерцоид, Пермское книжное издательство,1977 г.
5. - В поисках инерцоида, НиТ,1997 г.
6.Журнал «Техника молодежи» № 4 – 1969 г.
7.Журнал «Изобретатель и рационализатор» № 8 -1977 г.
Автор: Инженер,
Координаты для связи: Е-mail - *****@***ru,
443008, город Самара, улица Вольская, дом 83, кВ.53,
Телефон: 8 905 30 43 032 (моб), 8(846) 201 99 58, 8(846) 249 32 30.
