


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
С полностью автономным управлением
Роботизированные платформы с данным видом управления управляются автоматически. Платформы, с полностью автономным управлением обычно имеют на борту компьютер, который способен на основе полученных от датчиков и периферийных устройств данных самостоятельно, без участия человека принять решение о его дальнейших передвижениях и действиях.
Такие платформы используют в областях, в которых участие человека не обязательно. Например, робот пылесос из патента [16] имеет чётко заложенный алгоритм управления и может без помощи человека убирать помещения.
Также можно отметить описанную ранее автономную роботизированную мобильную платформу, на ортогональном шагающем приводе, предназначенную для сбора данных и мониторинга окружающей среды, описанную в источнике [9].
С гибридным управлением
Платформы с гибридным видом управления способны управляться как оператором, так и бортовым компьютером. Такие платформы могут выполнять действия автономно, до тех пор, пока не потребуется помощь оператора.
В источнике [17] описывается роботизированная мобильная платформа «SMSS», разработанная компанией «Lockheed Martin». Данная платформа предназначена для помощи солдатам в переноски вещей и оборудования. Также робот способен заряжать аккумуляторные батареи различных устройств. Платформа оборудована шести колёсным приводом, который позволяет использовать её в условиях бездорожья. Устройство имеет гибридный тип управления. Платформа может перемещаться по местности, используя различные датчики и GPS, самостоятельно, либо при необходимости управляться оператором.
2. Разработка требований и технических характеристик подвижной части роботизированной платформы
Привод
Разрабатываемая роботизированная платформа в основном будет использоваться в помещениях и на ровных уличных площадках в погоду без[RA1] осадков, поэтому к её приводам предъявляются следующие требования:
- Умение преодолевать препятствия высотой около 3 см, например дверные пороги[RA2] ;
- Имение малого радиуса разворота, для хорошей мобильности в узких пространствах, например коридорах.
Для передачи изображения оператору на платформу установлена камера. Так[RA3] же камера необходима для коммуникации робота с людьми и ориентации его в окружающей среде, если платформой будет управлять бортовой компьютер. Поэтому к приводу предъявляются следующие требования:
- Наличие плавного разгона и торможения, что бы исключить тряску и тем самым получить с камеры более качественные данные для их дальнейшей обработки;
- Способность развивать скорость примерно равную 3-4 км/ч, чтобы успевать за шагающим человеком.
Дополнительны требования к платформе:
- Простота в ремонте
- Простота в обслуживание;
- Эффективное энергопотребление.
Корпус
При разработке корпуса подвижной части платформы следует учесть следующие требования:
- Размеры удобные для использования в помещениях и узких пространствах;
- Наличие достаточного внутреннего пространства для расположения оборудования, необходимого для системы управления и силовой части платформы;
- Наличие вырезов и отверстий для крепления датчиков и дополнительного оборудования;
- Быстрый доступ к внутреннему оборудованию для его починки или замены в случае поломки;
- На корпусе должно быть место для крепления дополнительного оборудования.
Датчики
Для своего позиционирования в пространстве платформа должна иметь следующие датчики:
- Магнитометр, для определения угла отклонение подвижной платформы от севера;
- Систему дальномеров, для определения расстояния до различных объектов.
Двигатели
Требования к двигателям платформы:
- Наличие возможности плавного разгона и торможения;
- Способность разгонять платформу до скорости равной 3-4 км/ч.
Логическая часть
Для управления двигателями и сбора информации на борту платформы используется микроконтроллер. Микроконтроллер должен соответствовать следующим требованиями:
1. Иметь все необходимые входы и выходы для подключения необходимых датчиков и драйверов управления двигателями
2. Иметь интерфейс для подключения к бортовому компьютеру и возможность подключения модулей беспроводной связи, для управления платформой оператором.
Для автономного управления платформой необходимо наличие бортового компьютера. Бортовой компьютер, расположенный на подвижной платформе, должен соответствовать следующим требованием:
- Иметь Wi-Fi или Bluetooth модуль для беспроводного подключения к компьютеру, за которым будет сидеть оператор;
- Иметь возможность подключения камеры, для передачи оператору видеосигнала;
- Иметь интерфейс для подключения к микроконтроллеру, контролирующему двигатели и датчик;
- Быть достаточно мощным для автоматического управления платформы и возможной обработке видео на борту платформы;
- Иметь компактный размер, для размещения в корпусе платформы.
Питание
Энергоснабжение платформы должно соответствовать следующим требованиям:
- Обладать раздельными контурами питания для силовой и логической части платформы. Данное решение помогает предотвратить поломку аппаратной логической части платформы при скачках энергии в силовой части;
- Время автономной работы ~3 часа;
- Иметь возможность питания дополнительных устройств;
- Предоставлять диапазон различных напряжение для питания устройств с различными входными параметрами.
3. Требование к разрабатываемой системе управления
Система управления роботизированной платформы состоит из программно - аппаратного комплекса.
Требования к аппаратной части
Аппаратная часть должна:
- Содержать микроконтроллер и драйверы, необходимые для управления двигателями;
- Иметь возможность управления по беспроводной сети оператором;
- Иметь возможность управления от бортового компьютера.
Требования к программной части
Программная часть должна состоять из следующего комплекса программ:
- Программа для микроконтроллера, управляемая двигателями;
- Программа для микроконтроллера, отвечающая за сбор данных с датчиков;
- Программа для реализации заворотов.
Так же необходимо разработать протокол для обмена командами и данными между микроконтроллером и устройством управления. В качестве устройства управления может выступать бортовой компьютер или компьютер оператора. Данный протокол должен учитывать возможность, как беспроводной связи, для управления оператором, так и по проводному протоколу, для управления платформой бортовым компьютером.
1. Разработка подвижной части платформы
Привод
Всем отмеченным требованиям, выдвинутым ранее в разделе «2.1 Привод» в главе «2. Разработка требований и технических характеристик подвижной части роботизированной платформы» отвечают два вида приводов: гусеничный и колёсный с бортовым типом разворота.
Для реализации привода был выбран колёсный тип. Данное решение было принято из-за простоты реализации и большей надежности, чем у гусеничного привода.
Привод приводится в движение четырьмя электромоторами, жёстко закреплёнными в корпусе. Данное решение позволяет платформе производить разворот на месте, что позволяет использовать платформу в узких пространствах.
Для платформы были подобраны колёса, таким образом, что бы обеспечить достаточный дорожный просвет. Данные колеса имеют резиновые покрышки, что дает платформе лучшее сцепление с поверхностью.
Корпус
Проектирование корпуса выполнено в программной среде «SolidWorks». Данный программный комплекс предназначен для проектирования твёрдотельных объектов. Так же «SolidWorks» позволяет, провести различные тесты на прочность, посчитать важные характеристики модели, такие как масса, и выполнить геометрическое моделирование схем твердотельных объектов.
Проектирование корпуса выполнено в следующей последовательности:
1. Разработка корпуса в среде «SolidWorks»;
2. Подбор материала;
3. Моделирование нагрузки на дно корпуса с целью проверки его прочности;
4. Создание чертежей для реализации платформы;
5. Создание корпуса по чертежам.
На этапе разработке корпуса, проектирование корпуса выполнено с учётом всех вырезов для крепления датчиков и прочего оборудования. Также[RA4] при проектировании корпуса была учтена возможность доступа ко всем компонентам платформы для их замены или починки. Доступ к оборудованию осуществляется через открытый верх платформы. В рабочем состояние верх платформы прикрывается двумя крышами, которые крепятся по средствам винтов и гаек к специальным уголкам платформы. При необходимости на крыши можно установить дополнительное оборудование. Готовый вид спроектированного корпуса и его крыши приведен на рисунке 1.
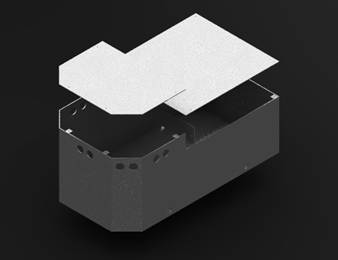
Рисунок 1. Результат моделирования корпуса в программе «SolidWorks[RA5] »
Как видно на рисунке 1, платформа имеет форму шестигранной коробки. Для датчиков расстояния в передней части платформы сделаны отверстия. Передняя часть платформы специально изогнута так, что бы датчики расстояния смотрели вперёд, влево, вправо, и вбок под 45 градусов. Так же на рисунке видны уголки, к которым винтами и гайками крепится крыша. Крыша платформы состоит из 3 частей. Внизу платформы проделаны 4 отверстия, по 2 с каждой стороны, для валов двигателей.
Получившиеся модель имеет следующие габаритные характеристики:
- Длина 408 мм;
- Ширина 223 мм;
- Высота передней части платформы 170 мм;
- Высота задней части платформы 130 мм.
В качестве материала для реализации платформы была выбрана сталь толщиной 1,5 мм. Данное решение обусловлено тем, что сталь является достаточно прочной, чтобы выдержать вес оборудования и не деформироваться. Крышки было решено сделать из пластика толщиной 2,5 мм. Данное решение было принято исходя из того, что пластик легко можно просверлить, или распилить для крепления в нём дополнительного оборудования. Масса смоделированного корпуса и крыши равняется 3,5 кг.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
