

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
XIX Республиканская научная конференция молодых исследователей
«Шаг в будущее – Инникигэ хардыы» имени академика
ЭЛЕКТРОННЫЙ СОНАР-БРАСЛЕТ ДЛЯ НЕЗРЯЧИХ ЛЮДЕЙ
Россия, Республика Саха (Якутия), Олекминский район, с. Даппарай,
МБОУ «Кыллахская средняя общеобразовательная школа», 7 класс
Научный руководитель:
,
учитель физики и информатики
ЯКУТСК
2014
ЭЛЕКТРОННЫЙ СОНАР-БРАСЛЕТ ДЛЯ НЕЗРЯЧИХ ЛЮДЕЙ
Россия, Республика Саха (Якутия), Олекминский район, с. Даппарай,
МБОУ «Кыллахская средняя общеобразовательная школа», 7 класс
1. Введение
Зрение ‒ неоценимый помощник при ориентировке и передвижении в пространстве. Зрение является дистантным органом чувств и позволяет опознать предмет, определить его местоположение в окружающем пространстве среди других объектов, определить расстояние до этого объекта. Люди, у которых зрение отсутствует, испытывают большие трудности при ориентировке и передвижении. По данным Минздрава России слепых и слабовидящих насчитывалось 218 тыс. человек, из них абсолютно слепых – 103 тыс. (данные на 2009 год) [4]. Незрячие люди могут быть самостоятельными и независимыми. Эта мысль уже никого не удивляет. Быть независимыми, незрячим во многом помогают технические средства реабилитации. К техническим средствам реабилитации следует отнести всю ту технику, которая создается специально для слепых, зрячие в ней не нуждаются, а для слепых же имеет неоценимо большое значение.
Цель работы: создание электронного сонара-браслета для бесконтактного ориентирования незрячих людей в помещении.
Задачи:
1. Из различных источников изучить принцип эхолокации и ее применение животными, технические устройства для помощи слепым и слабовидящим;
2. Изучить зависимость скорости звука от температуры воздуха, оценить точность измерения используемого датчика при низких температурах;
3. Используя знания в области робототехники и учебный конструктор спроектировать, собрать экспериментальный образец установки;
4. С помощью ПО конструктора составить рабочий алгоритм программы;
5. Исходя из выводов по проделанной работе определить перспективы дальнейшего развития проекта.
Новизна и практическая значимость: Активное развитие вычислительной техники и информационных технологий не только открывает перед исследователями новые возможности в области построения искусственных интеллектуальных систем для помощи незрячим людям. Прототип устройства может быть использован для разработки реального прибора с большим функционалом и эргономичностью.
Материалы и методы исследования: В качестве рабочих деталей устройства электронного сонара-браслета был использован микрокомпьютер роботконструктора LEGO Mindstorms EV3, ультразвуковой датчик, входящий в стандартную комплектацию конструктора; использованы текстильные материалы для удобного крепления прибора на запястье; для составления рабочего алгоритма программы использовано ПО LEGO Mindstorms EV3.
Согласно поставленной цели и задачам в работе были применены следующие методы: метод гипотез (научное предположение об определении расстояний методом эхолокации, определение дальнейшей перспективы развития проекта); экспериментальный метод (проектирование и сборка экспериментального образца установки, составление рабочего алгоритма).
2. Эхолокация
2.1. История открытия эхолокации
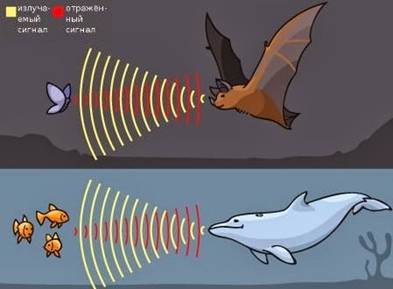
Рисунок 1. Открытие эхолокации связано с наблюдением за некоторыми животными.
Эхолокация (эхо и лат. locatio — «положение») — способ, при помощи которого положение объекта определяется по времени задержки возвращений отражённой волны. Если волны являются звуковыми, то это звуколокация, если радио — радиолокация [2].
Открытие эхолокации связано с именем итальянского естествоиспытателя Ладзаро Спалланцани. Он обратил внимание на то, что летучие мыши свободно летают в абсолютно тёмной комнате (где оказываются беспомощными даже совы), не задевая предметов (рисунок 1). В своём опыте он ослепил несколько животных, однако и после этого они летали наравне со зрячими. Коллега Жюрин провёл другой опыт, в котором залепил воском уши летучих мышей, — и зверьки натыкались на все предметы. Отсюда учёные сделали вывод, что летучие мыши ориентируются по слуху. Однако эта идея была высмеяна современниками, поскольку ничего большего сказать было нельзя — короткие ультразвуковые сигналы в то время ещё было невозможно зафиксировать [5].
Впервые идея об активной звуковой локации у летучих мышей была высказана в 1912 году Х. Максимом. Он предполагал, что летучие мыши создают низкочастотные эхолокационные сигналы взмахами крыльев с частотой 15 Гц.
Об ультразвуке догадался в 1920 году англичанин Х. Хартридж, воспроизводивший опыты Спалланцани. Подтверждение этому нашлось в 1938 году благодарябиоакустику Д. Гриффину и физику Г. Пирсу. Гриффин предложил название эхолокация (по аналогии с радиолокацией) для именования способа ориентации летучих мышей при помощи ультразвука.
2.2. Эхолокация у животных
Эхолокация — один из способов ориентации животных в пространстве. Эхолокация развита у летучих мышей и дельфинов, обнаружена у землероек, ряда видов ластоногих (тюлени), птиц (гуахаро, саланганы и некоторые др.). У дельфинов и летучих мышей эхолокация основана на излучении ультразвуковых импульсов частотой до 130—200 кгц при длительности сигналов обычно от 0,2 до 4—5 мсек, иногда более. У птиц, живущих в тёмных пещерах (гуахаро и саланганы), используется для ориентации в темноте; они излучают низкочастотные сигналы в 7—4 кгц. У дельфинов и летучих мышей, кроме общей ориентации, эхолокация служит для определения пространственного положения цели, размеров, а в ряде случаев — и распознавания облика цели. У упомянутых млекопитающих часто служит важным средством поиска и добычи объектов питания [2].
Для обнаружения объектов окружающей среды некоторые животные используют и другие виды информации. Глубоководные кальмары, например, помимо обычных органов зрения наделены особыми рецепторами, способными улавливать инфракрасные лучи, а своеобразные органы — «термолокаторы» — гремучих змей служат для поисков добычи, воспринимая тепловое излучение живых существ и реагируя на разность температур в тысячную долю градуса.
2.3. Ультразвук. Основные свойства
Звук – это механические колебания, распространяющиеся в упругой среде. Ультразвук – это звук с частотой свыше 20кГц, не воспринимаемый человеческим слухом. Роль микрофонов и громкоговорителей в сфере ультразвука выполняют устройства, называемые трансдюсерами. Ультразвуковые датчики, действующие по принципу эхолокации, используют один трансдюсер как для передачи, так и для приема сигналов. В датчиках приближения и измерения расстояния, предназначенных для автоматизации технологических процессов в качестве трансдюсеров применяются пьезоэлектрические преобразователи (далее - пьезоэлементы) с рабочей частотой от 40 до 400кГц.

Рисунок 2. Ультразвуковой датчик конструктора LEGO Mindstorms EV3.
Работа ультразвуковых датчиков базируется на излучении, приёме и анализе прямой или отраженной УЗ-волны. Излучатель формирует и испускает сигнал, приёмник, получив его, усиливает и обрабатывает. Контроллер, встроенный в датчик, в зависимости от заложенного алгоритма вырабатывает выходной сигнал. Работа контроллера заключается в анализе поступившей информации либо в результате прерывания ультразвукового сигнала, либо в оценке расстояния на основе времени полета звуковой волны до объекта и обратно [3].
Ультразвуковые датчики широко используются в качестве датчиков приближения (proximity), для дистанционного обнаружении различных объектов, измерения расстояний. В настоящее время на рынке представлен широкий выбор ультразвуковых датчиков в различных конструктивных исполнениях, действующих в различных акустических частотах. Поведение различных акустических частот в схожих условиях окружающей среды не является одинаковым. В большинстве случаев не составит труда, руководствуясь характеристиками, данными производителем, выбрать подходящий датчик для своей задачи.
В своей работе мы брали ультразвуковой датчик (рисунок 2), входящий в стандартный набор робототехнического конструктора.
2.4. Скорость звука в воздухе. Зависимость от температуры [3]
В ультразвуковых датчиках, действующих по принципу эхолокации, расстояние до объекта рассчитывается на основании измерения времени между моментами посылки и приема звукового импульса и скорости звука в среде. Для газов формула скорости звука (c) выглядит так:

где: γ — показатель адиабаты: 5/3 для одноатомных газов, 7/5 для двухатомных (и для воздуха), 4/3 для многоатомных; k — постоянная Больцмана; R — универсальная газовая постоянная; T — абсолютная температура в кельвинах; t — температура в градусах Цельсия; m — молекулярная масса; M — молярная масса.
По порядку величины скорость звука в газах близка к средней скорости теплового движения молекул и в приближении постоянства показателя адиабаты пропорциональна квадратному корню из абсолютной температуры.
Формула скорости звука в воздухе при давлении ~1атм:
C(t) = 331(1+ t / 273)
где t – температура в градусах Цельсия. Из зависимости видно, что скорость распространения звуковых волн снижается с понижением температуры воздуха.
Таким образом, мы вычислили скорость звука в помещении с температурой воздуха 20°С:
С(t)=331(1+20/273)=331+24,25=355,25 м/с
Зимой, при температуре -40°С скорость звука будет:
С(t)=331(1-40/273)=331-48,5=282,5 м/с
Используя данную формулу мы построили график, который показан на рисунке 3.
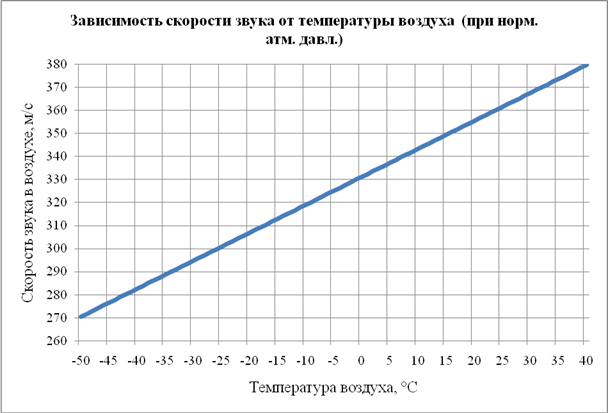
Рисунок 3. Зависимость скорости звука от температуры воздуха.
Как мы видим, скорость звука зимой и летом бывает разная. Поэтому при разработке эхолокационных устройств следует обратить внимание на климатические условия эксплуатации.
Чтобы оценить точность измерения используемого в работе датчика мы провели эксперимент. С помощью демонстрационной линейки измерили показания датчика в помещении (18°С) и на улице (45°С). Атмосферное давление 764 мм. рт. ст. Результаты измерений показаны на рисунке 4.
Из графика видно, что при комнатной температуре показания датчика более точные, сравнимы с показаниями демонстрационной линейки. На улице показания датчика не очень точные. Это объясняется тем, что при низких температурах скорость звука уменьшается.
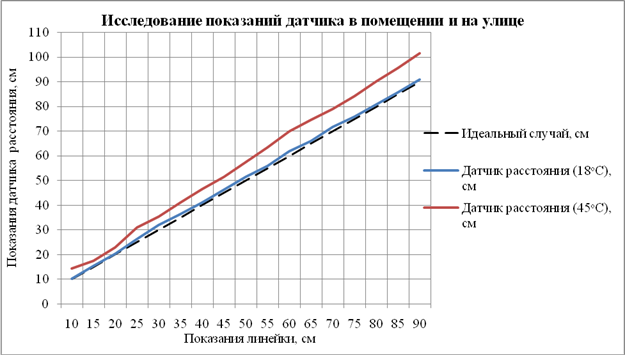
Рисунок 4.Исследование показаний датчика в помещении и на улице.
2.5. Длина звуковой волны [3]
Длина звуковой волны определяется из соотношения:
λ=c/f,
где: λ – длина волны; c – скорость звука; f – частота.
В случае, когда размер препятствий и неоднородностей в среде заметно превышает длину волны звука, распространение звука происходит по законам геометрической акустики. Если же препятствия сравнимы с длиной волны (или меньше ее), существенную роль начинает играть дифракция волн, с которой связано и рассеяние звука. Данные явления следует учитывать при выборе датчика, особенно, для обнаружения мелких объектов и неровностей. Например, длина волны при скорости звука 355 м/с (20о С, 1 атм) для частоты:
40 кГц – 8,6 мм.;
180 кГц – 1,9 мм.;
400 кГц – 0,86 мм.
Эквивалентна длине волны и разрешающая способность датчиков, указываемая многими производителями в спецификациях на изделия. В спецификации датчика (рисунок 2) частота и длина волны не указаны.
3. Технические устройства ориентирования и навигации для незрячих людей
3.1. Устройство Batcane [1]
Для здоровья и хорошего самочувствия любому человеку необходимо вести активный образ жизни много двигаться. Перед незрячим человеком в первую очередь встает проблема: как победить психологическую боязнь передвигаться без посторонней помощи. На пути его подстерегает множество препятствий. Разработка фирмы Arthur D. Little (ADL), компании Cambridge Consultants Limited (CCL) и дочерней фирмы Университета Лидса (Britains Leeds University) Sound Alert Technology (SAT) призвана сделать слабовидящих людей более подвижными и менее зависимыми от зрячих. Устройство называется Batcane (Bat мышь, Cane трость) и работает по принципу эхолокации, ориентируясь в пространстве подобно летучей мыши (Рисунок 4). Известно, что в гортани этого животного генерируются локационные сигналы, которые испускаются в виде коротких ультразвуковых импульсов частотой до 130 КГц и продолжительностью от 0,2 до 100 миллисекунд. Эхолокация позволяет летучим мышам даже в абсолютной темноте различать препятствия.
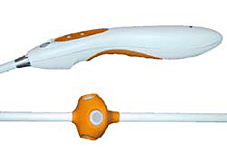
Рисунок 4. Ручка и трансмиттер-ресивер Batcane
Внешне Batcane, само собой, похож на трость. Отличие устройства от обычной тросточки заключается в прикрепленном на расстоянии 3540 сантиметров от конца ультразвуковом трансмиттере-ресивере. Он напоминает луковичку с четырьмя глазами, задача которых посылать сигнал и улавливать эхо. Результаты этих действий в виде вибрации передаются в ручку трости. В ручке находятся четыре вибрирующих датчика (по два сверху и снизу), внутри размещаются батарейки АА, предназначенные для питания устройства. Принцип работы Batcane таков: по мере приближения препятствия к пользователю устройства вибрация учащается, поэтому стучать тростью нет необходимости. Разработчики утверждают, что трость обнаруживает препятствия не только впереди, но и вокруг человека, не только на земле, но и выше даже на уровне человеческого роста.
3.2. Навигационный прибор Tormes [1]
Проблему удобства передвижения незрячего человека пытаются решить как усовершенствованием трости, так и разработкой специальных устройств спутниковой навигации. Национальная испанская организация слепых людей (ONCE) совместно со специалистами компании GMV Sistemas создала устройство под названием Tormes (рисунок 5). Оно объединяет в себе портативный компьютер, оснащенный клавиатурой с азбукой Брайля, и систему спутниковой навигации, дающую человеку устные команды. Tormes оснащен системой навигации European Geostationary Navigation Overlay Service (EGNOS). Устройство интересно тем, что позволяет определить местоположение с точностью до 2 метров. GPS, в свою очередь, имеет точность от 15 до 20 метров. Но и EGNOS не идеальна. В связи с тем, что сигнал передается через геостационарные спутники, он иногда блокируется зданиями. Это явление называется эффектом каньона. В дальнейшем для усовершенствования прибора разработчики предполагают получать данные через Интернет или GSM.

Рисунок 5. Навигационный прибор Tormes
3.3. Электронный сонар-браслет
Нами был разработан прототип прибора, который называется «Электронный сонар-браслет». В работе использовали микрокомпьютер из робототехнического конструктора LEGO Minstorms EV3 и ультразвуковой датчик расстояния, который входит в стандартную комплектацию.
Принцип работы прибора достаточно простой (Рисунок 6). Датчик прибора излучает ультразвуковые волны, которые человеческое ухо неспособно воспринять. Отразившись от препятствия, волны возвращаются обратно в датчик. Прибор по времени, которое понадобилось для излучения и получения ультразвука высчитывает расстояние до препятствия. При расстояниях больше 1 м прибор сообщает «Путь свободен!», при расстояниях меньше 1 м прибор воспроизводит предупреждающее сообщение «Внимание, препятствие!».
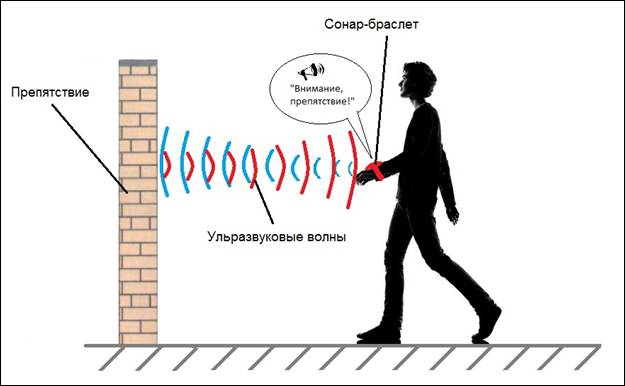
Рисунок 6. Принцип работы прибора.
Основным достоинством прибора является то, что он носится на запястье как браслет, что по-нашему мнению, очень удобно – можно «направить» прибор в нужную нам сторону (Рисунок 7). Прибор заключен в удобный чехол с резинкой, чтобы защитить его от случайных повреждений и при необходимости без особых усилий снять.

Рисунок 7. Внешний вид устройства
Для составления рабочего алгоритма (рисунок 8) мы использовали Программное обеспечение для учащегося LEGO MINDSTORMS Education EV3 Student Edition. Среда разработки графическая, в ней достаточно быстро можно составить программу из готовых блоков.

Рисунок 8. Рабочий алгоритм работы прибора
Наша программа разделена на две подпрограммы. Первая подпрограмма начинает работать, когда мы нажимаем верхнюю кнопку на микрокомпьютере. При нажатии кнопки датчик расстояния начинает сравнивать свои текущие показания с «критическим» расстоянием (в нашем случае 100 см). При расстоянии >=100 воспроизводится аудиозапись «Путь свободен!», при расстоянии <=100 – «Внимание, препятствие!». После воспроизведения одного и этих двух аудиозаписей программа снова «ждет» когда мы нажмем на кнопку, после чего выполнение программы повторится. Вторая подпрограмма выводит значение датчика расстояния в сантиметрах по центру экрана. Для запуска данной подпрограммы не нужно нажимать какую-то кнопку не нужно.
В перспективе: сделать прибор более компактным; многофункциональным (добавить сообщения о конкретном расстоянии до препятствия, функцию определения цвета предмета); учитывать эксплуатацию при низких температурах; изучить вопрос смены звуковой формы взаимодействия прибора с пользователем на тактильную (например, вибровзаимодействие).
4. ЗАКЛЮЧЕНИЕ
1. Изучена история развития эхолокации, использование эхолокации животными, основные свойства ультразвука, технические устройства для ориентирования и навигации для незрячих людей. Эхолокация – способ, при помощи которого положение объекта определяется по времени задержки возвращений отражённой волны. Она широко используется в технике. Поводом для ее открытия послужило наблюдение за летучими мышами и другими животными. На основе эхолокации создаются приборы для помощи незрячим людям;
2. Изучена зависимость скорости звука от температуры воздуха, построен график. С увеличением температуры линейно увеличивается скорость звука. Чтобы оценить точность измерения используемого в работе датчика мы провели эксперимент. С помощью демонстрационной линейки измерили показания датчика в помещении (18°С) и на улице (45°С). Атмосферное давление 764 мм. рт. ст. Результаты показывают, что при комнатной температуре показания датчика более точные, сравнимы с показаниями демонстрационной линейки. На улице показания датчика не очень точные. Это объясняется тем, что при низких температурах скорость звука уменьшается.
3. Спроектирован и собран экспериментальный образец установки. Основным достоинством прибора является то, что он носится на запястье как браслет, что по-нашему мнению, очень удобно – можно «направить» прибор в нужную нам сторону. Прибор заключен в удобный чехол с резинкой, чтобы защитить его от случайных повреждений и при необходимости без особых усилий снять.
4. С помощью ПО конструктора составлен рабочий алгоритм программы. При нажатии кнопки датчик расстояния начинает сравнивать свои текущие показания с «критическим» расстоянием (в нашем случае 100 см). При расстоянии >=100 воспроизводится аудиозапись «Путь свободен!», при расстоянии <=100 – «Внимание, препятствие!».
5. Исходя из выводов по проделанной работе определены перспективы дальнейшего развития проекта: сделать прибор более компактным; многофункциональным (добавить сообщения о конкретном расстоянии до препятствия, функцию определения цвета предмета); учитывать эксплуатацию при низких температурах; изучить вопрос смены звуковой формы взаимодействия прибора с пользователем на тактильную (например, вибровзаимодействие).
6. ИСПОЛЬЗОВАННАЯ ЛИТЕРАТУРА
1. Ващилко Елена. ИТ в здравоохранении [Электронный ресурс]: В помощь незрячим людям URL: http://www. lib. tsu. ru/win/produkzija/metodichka/6_6.html (Дата обращения: 21.11.2014);
2. Википедия [Электронный ресурс]: Эхолокация URL:http:// ru. wikipedia. org/wiki/Эхолокация (Дата обращения: 20.11.2014);
3. Глававтоматика. Ультразвуковые датчики в окружающей среде [Электронный ресурс] URL: http://snt. mega-sensor. ru/ (Дата обращения: 20.11.2014);
4. МедНовости. Инвалидность по зрению ежегодно получают 45 тысяч Россиян [Электронный ресурс] URL: medportal. ru/mednovosti/news/2009/10/07/blind/ (Дата обращения: 21.11.2014);
5. Морозов биоакустика. Изд. 2-е, доп., перераб. — М.: Знание, 1987. — 208 с. + 32 с. вкл. — С. 30-36;
