
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Контрольная работа №1
Теоретическая часть
Рассмотрим основные конструктивные особенности и электромеханические свойства разновидностей ДТП, наиболее распространенных на промышленных предприятиях.
Конструктивная схема двухполюсного двигателя постоянного тока представлена на рис.1.1. Якорь машины 1, вращающийся в подшипниках, помещен в магнитное поле, создаваемое главными полюсами 3 и обмоткой возбуждения двигателя 2, расположенной на них. Ток возбуждения IВ, проходящий по обмотке 2, создает МДС, под действием которой возникает поток ФВ, который замыкается по контуру: главные полюсы 3 - якорь машины 1 - магнитопровод станины 4.
В пазах якоря уложена силовая обмотка якоря, концы отдельных секций которой выведены на коллектор. К нему подводится ток якоря Iа от питающей сети через щетки 5. На рис.1.1 проводники якоря показаны условно распределенными по поверхности якоря, ламели коллектора не показаны и ток Iа для большей наглядности подводится щетками 5 непосредственно к проводникам обмотки якоря. В результате взаимодействия проходящего по проводникам якоря тока Iа с магнитным потоком Ф возникает электромагнитный момент машины (Н*м)
М = кФIа (1.1)
где k — конструктивный коэффициент; Ф — поток, Вб; Iа — ток якоря, А.
Как видно из схемы, при вращении якоря ток в витке обмотки якоря, проходящем под щеткой, меняет свое направление — происходит процесс так называемой коммутации тока коллектором. Вследствие явления самоиндукции и по ряду других причин коммутация тока на

Рис.1.1. Конструктивная схема двигателя постоянного тока.
коллекторе может сопровождаться искрением, а при неблагоприятных условиях вызывать перекрытие коллектора дугой, которое приводит к выходу машины из строя.
Для нормальной коммутации тока проводник в зоне коммутации должен находиться в магнитном поле определенного направления и величины. Такое поле в зоне коммутации создается предусмотренными для этой цели дополнительными полюсами машины 6. Обмотка дополнительных полюсов 7 включается последовательно с обмоткой якоря и обтекается током Iа.
При вращении якоря в витках его обмотки наводится переменная ЭДС (В), которая выпрямляется коллектором и имеет результирующую величину
Е=кФ (1.2)
где ![]() — угловая скорость вращения якоря, рад/с.
— угловая скорость вращения якоря, рад/с.
Ток якорной цепи (А) определяется по формуле
 (1.3)
(1.3)
где U — напряжение сети, В; ![]() Ra - суммарное сопротивление всех последовательно соединенных элементов якорной цепи, Ом.
Ra - суммарное сопротивление всех последовательно соединенных элементов якорной цепи, Ом.
При пуске двигателя ![]() и Е в первый момент равны нулю и в якорной цепи протекает ток короткого замыкания
и Е в первый момент равны нулю и в якорной цепи протекает ток короткого замыкания
IК. З. =U/ Ra (1.4)
Так как сопротивление якорной цепи двигателя при отсутствии внешних добавочных сопротивлений очень мало, то при включении двигателя на полное напряжение сети ток IК. З. может сразу достичь недопустимо большой величины. Для ограничения пускового тока либо понижают подводимое к двигателю напряжение (если двигатель получает питание от отдельного управляемого преобразователя), либо в якорную цепь вводят пусковое сопротивление RП. По мере увеличения скорости двигателя его противо-ЭДС возрастает и ток уменьшается. Поэтому в процессе пуска постепенно повышают напряжение или выводят пусковое сопротивление в якорной цепи.
Электромеханические свойства двигателей, наиболее важные для механизмов, проявляются в зависимости скорости вращения двигателя от нагрузки на его валу. Так как нагрузка на валу непосредственно определяет величину момента М, развиваемого двигателем, то эти свойства полностью зависят от формы так называемой механической характеристики двигателя ![]() = f(M). Уравнение этой характеристики для двигателя постоянного тока
= f(M). Уравнение этой характеристики для двигателя постоянного тока
![]() (1.5)
(1.5)
На практике более привычно выражать скорость в оборотах в минуту и обозначать буквой n. В дальнейшем используется это обозначение, поэтому уравнение механической характеристики следует записать в виде:
n=![]() , (1.6)
, (1.6)
где: Ua –напряжение в цепи якоря, В; М – момент на валу якоря, Нм; ![]() Ra – суммарное сопротивление в цепи якоря, Ом; Ф (1.7) – суммарный магнитный поток двигателя постоянного тока, Вб; Се и Сm – конструктивные коэффициенты определенного двигателя.
Ra – суммарное сопротивление в цепи якоря, Ом; Ф (1.7) – суммарный магнитный поток двигателя постоянного тока, Вб; Се и Сm – конструктивные коэффициенты определенного двигателя.
Ф = ФП + ФОА+ФОВ (1.7)
где: ФП - магнитный поток, создаваемый полюсами; ФОА - магнитный поток обмотки якоря; ФОВ - магнитный поток обмотки возбуждения.
В уравнении (1.6) первое слагаемое есть скорость вращения двигателя на холостом ходу при М=0, второе – приращение скорости при изменении нагрузки.
В соответствии с (1.6) электромеханические свойства двигателя постоянного тока существенно зависят от способа соединения обмоток якоря и возбуждения или, другими словами, от способа его возбуждения (рис.1.2).
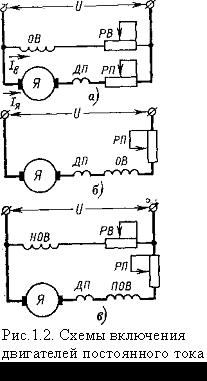 На рис.1.2,а представлена схема включения двигателей с независимым возбуждением (ДПТНВ). Обмотка возбуждения (ОВ) такого двигателя имеет большое число витков относительно тонкого провода и рассчитана на непосредственное подключение к питающей сети. В процессе работы ток возбуждения IВ устанавливается с помощью реостата РВ и остается постоянным независимо от нагрузки двигателя. При этом поток машины постоянен и скорость холостого хода n0 не изменяется. При увеличении нагрузки на валу момент М увеличивается, поэтому в соответствии с (1.4) скорость двигателя n уменьшается. Однако при выведенном пусковом реостате РП сопротивление
На рис.1.2,а представлена схема включения двигателей с независимым возбуждением (ДПТНВ). Обмотка возбуждения (ОВ) такого двигателя имеет большое число витков относительно тонкого провода и рассчитана на непосредственное подключение к питающей сети. В процессе работы ток возбуждения IВ устанавливается с помощью реостата РВ и остается постоянным независимо от нагрузки двигателя. При этом поток машины постоянен и скорость холостого хода n0 не изменяется. При увеличении нагрузки на валу момент М увеличивается, поэтому в соответствии с (1.4) скорость двигателя n уменьшается. Однако при выведенном пусковом реостате РП сопротивление ![]() Ra весьма мало и скорость в рабочих пределах изменения нагрузки можно считать примерно постоянной. В этом можно убедиться, рассматривая приведенную на рис.1.3 естественную механическую характеристику ДПТНВ (прямая 1).
Ra весьма мало и скорость в рабочих пределах изменения нагрузки можно считать примерно постоянной. В этом можно убедиться, рассматривая приведенную на рис.1.3 естественную механическую характеристику ДПТНВ (прямая 1).
Важнейшим достоинством ДПТНВ является возможность плавного регулирования скорости в широких пределах и без больших затрат мощности. Такое регулирование осуществляется:
ü изменением напряжения на зажимах якоря - в этом случае искусственные характеристики располагаются в I зоне регулирования (см. рис. 1.3) и сохраняют жесткость, равную жесткости естественной механической характеристики;
ü изменением тока в обмотках якоря – в этом случае искусственные характеристики располагаются в I зоне регулирования, но теряют жесткость по сравнению с естественной характеристикой.[1]
ü изменением его потока возбуждения (поток может - в этом случае искусственные характеристики располагаются во II зоне регулирования, но теряют жесткость по сравнению с естественной характеристикой.
Учитывая рассмотренные свойства ДПТНВ, его применяют в тех случаях, когда желательно иметь стабильную скорость механизма при разных нагрузках, когда требуются широкие пределы регулирования скоростей и, в особенности, в автоматизированном электроприводе.
Схема включения двигателя с последовательным возбуждением (ДПТПВ) представлена на рис.1.2,6. Обмотка возбуждения такого двигателя изготавливается из толстого провода или шинки с малым числом витков, так как рассчитывается на включение последовательно с обмоткой якоря двигателя; ток возбуждения при этом равен току якоря. Поэтому при уменьшении нагрузки на валу происходит уменьшение потока двигателя Ф, а скорость холостого хода двигателя n0 в соответствии с (1.6) увеличивается обратно пропорционально потоку и скорость вращения ДПТПВ сильно зависит от нагрузки на валу (кривая 2 на рис.1.3, что является существенным недостатком. При малых нагрузках скорость велика, а при увеличении нагрузки она снижается. Работа такого двигателя вхолостую недопустима, так как при этом его скорость увеличивается до значений, при которых возможны механические повреждения якоря (двигатель «идет вразнос»). Достоинством ДПТПВ является большой пусковой момент.
Указанные особенности ДПТПВ определяют его широкое применение на транспорте (трамваи, троллейбусы, электровозы), на подъемных механизмах наиболее ответственных кранов и в некоторых других случаях.
На рис.1.2,в приведена схема включения двигателя со смешанным возбуждением или компаундного двигателя (ДПТСВ). Такие двигатели имеют две обмотки на главных полюсах: обмотку независимого возбуждения НОВ и последовательного возбуждения ПОВ, намагничивающая сила которой действует согласно с намагничивающей силой. обмотки НОВ. Поток двигателя Ф и в этом случае зависит от нагрузки на валу, однако в меньшей степени, чем у ДПТПВ. Поэтому ДПТСВ занимают по своим электромеханическим свойствам промежуточное положение между первыми двумя видами двигателей постоянного тока (кривая 3 на рис.1.3).
При выборе типа двигателя необходимо вначале, руководствуясь значениями М1 и ПВ, определить какая именно схема соединения ОЯ с ОВ требуется в каждом конкретном случае.
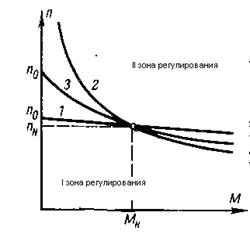
Рис.1.3. Механические характеристики двигателей постоянного тока.
Варианты ДЗ №1
Вариант | Диаграмма на рис.1.4 | М1, | М2, | М3, | М4 | t 1 | t 2, | t 3, | t 4, | n, | Величина напряжения, |
Н*м | Н*м | Н*м | Н*м | с | с | с | с | об/мин | В | ||
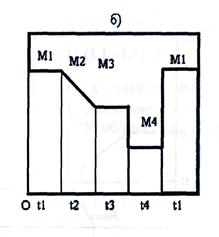
бурцев13 | б | 50 | 70 | 90 | 0 | 400 | 300 | 200 | 500 | 550 | 220 |
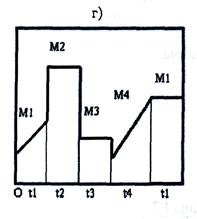
сезонов15 | г | 10 | 50 | 30 | 0 | 50 | 20 | 30 | 20 | 655 | 220 |
Алгоритм выполнения контрольной работы №1
Дано:
M1=100 Н∙м; М2=50 Н∙м; М3=200 Н∙м; М4=40 Н∙м; t1=4 c; t2=5 c; t3=3 c; t4=8 c;
n=700 об/мин. Род тока и напряжения - постоянный 440В.
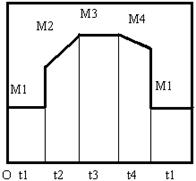
Рис.1.4 Заданная диаграмма моментов производства механизма
1.По заданным значениям моментов и времени и с учетом изменения нагрузки, показанной на заданной диаграмме (на данной диаграмме: М1и М3 - неизменяющиеся моменты за соответствующие промежутки времени t1 и t3, а М2 и М4 – изменяющие свое значение за соответствующие промежутки времени t2 и t4), строим временную диаграмму моментов для заданного механизма (рис.1.5).
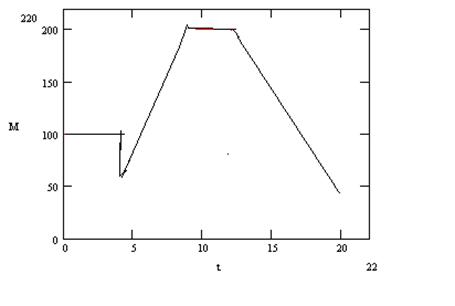
Рис.1.5 Временная диаграмма моментов для заданного механизма
2. Определяем продолжительность включения
ПВ= ; (1.8)
; (1.8)
3. Определяем эквивалентный момент по формуле 1.9. Из таблицы 1.1 выбираем коэффициент ![]() , учитывающий продолжительность включения двигателя:
, учитывающий продолжительность включения двигателя:
ПВ | 15 | 25 | 40 | 60 | 100 |
| 0,2 | 0,4 | 0,6 | 0,8 | 1 |
Мэкв= Н*м; (1.9)
Н*м; (1.9)
где Mi - момент в определенный промежуток времени, Нм; ti - продолжительность данного промежутка, сек.; Σtраб - суммарное время работы двигателя, сек.; Σtn - суммарное время пауз в работе, сек.
Учитывая, что Σtn =0, получаем:
![]()
4. Находим необходимую эквивалентную мощность, исходя из эквивалентного момента и заданной скорости вращения якоря:
![]() (1.9)
(1.9)
![]()
5. Искомую номинальную мощность двигателя принимаем равной:
Pном=(1.1-1,3)∙PЭ (1.10)
Рном=(1.1-1,3)∙7235,5=7959,05-9406,15 Вт.
6. Способ соединения ОЯ и ОВ – независимый, так как М1 практически равна Мэ.
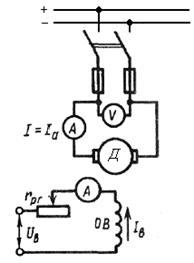
Рис.1.6. Схема соединений ОЯ с ОВ ДПТНВ
7. По справочнику [] выбираем электродвигатель постоянного тока 4ПН200М номинальными мощностью PH=8,5 кВт и частотой вращения n=750 об/мин, рассчитанный на напряжение 440В. Максимальная скорость вращения двигателя nmax=1500 об/мин.
8. После выбора двигателя и определения всех его номинальных данных строим естественную механическую характеристику выбранного двигателя. Для ее построения, которая прямолинейна, находим две точки: {Мн; nн} и {Мmin; nmax}, используя следующие формулы:
 (1.10 а, б)
(1.10 а, б)
 (1.10 в, г)
(1.10 в, г)
По полученным данным {108,3; 78,5}, {54,1; 157}строим естественную механическую характеристику выбранного двигателя (прямая 1 на рис.1.6).
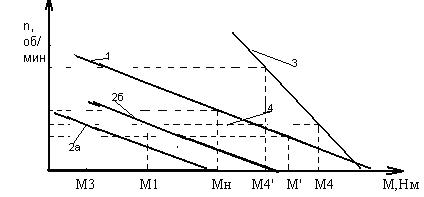
Рис.1.6 Механическая характеристика ДПТ
9. Для определения требуемой зонности регулирования, проводим прямую, соответствующую заданной скорости вращения вала двигателя (прямая 4 на рис.1.6), на которой отмечаем заданные в условии моменты. В данном случае имеем двух зонное регулирование.
10. В первой зоне регулирования характеристики, при изменении напряжения на якоре, сохраняют свою жесткость, следовательно для построения искусственных характеристик в этом случае достаточно через требуемую точку провести прямые, параллельные естественной.
Если в качестве способа регулирования в этой зоне будет выбрано изменение тока якоря, то искусственные характеристики будут проходить через неизменную скорость холостого хода и заданную точку, теряя жесткость.
В данном случае выбираем вариант Ua= var (прямые 2а и 2б на рис. 1.6).
Во второй зоне регулирование осуществляется за счет уменьшения магнитного потока, создаваемого обмоткой возбуждения. Характеристики прямолинейны, но не параллельны естественной характеристике.
Для постоения искусственной характеристики во второй зоне (прямая 3 на рис.1.6), учитывая, что при таком способе регулирования P= const, определяем его значение по формуле (1.11.).
![]()
![]()
![]()
![]()
![]()
 (1.11)
(1.11)
Затем, задавая произвольное, но близкое к нулю, значение момента, находим еще одну точку с координатами {![]() }.
}.
 (1.12)
(1.12)
Контрольная работа № 2
Теоретическая часть
Двигатели переменного тока также имеют несколько разновидностей. Наиболее важными из них являются двигатели трехфазного тока: асинхронные с короткозамкнутым (АДК) или фазным (АДФ) ротором и синхронные (СД).
В сравнении с двигателями постоянного тока асинхронные двигатели проще, дешевле, надежнее в эксплуатации и не требуют преобразования трехфазного переменного тока, получаемого непосредственно от заводских сетей, в постоянный ток.
Конструктивная схема трехфазного асинхронного АДК приведена на рис.2.1,а. Шихтованный статор машины 1 имеет равномерно расположенные по внутренней расточке пазы, в которые уложены три фазы обмотки. Оси обмоток фаз пространственно сдвинуты на 120° относительно друг друга. При включении обмотки статора в трехфазную сеть переменного тока в фазах протекают переменные токи IА, IВ, Ic, которые создают переменные н. с. FA, FВ и Fc, изменяющиеся во времени по синусоидальным законам со сдвигом во времени на 1/3 периода переменного тока.
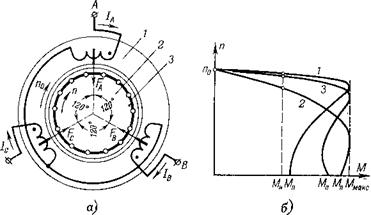
Рис.2.1. Конструктивная схема (а); механические характеристики АДК (б)
Вследствие сдвига по времени максимумы магнитных потоков фаз наступают поочередно в последовательности — фаза А, фаза В, фаза С, что приводит к вращению результирующего магнитного поля машины со скоростью
![]() (2.1)
(2.1)
где: f1 — частота сети переменного тока, Гц; 2р — число пар полюсов; n1 – скорость вращения результирующего магнитного поля в воздушном зазоре между статором и ротором, об/мин.
Так как число пар полюсов может выражаться только числами натурального ряда 1, 2, 3, 4 и т. д., то при промышленной частоте синхронная скорость двигателя может иметь лишь вполне определенные значения: 3 000, 1 500, 1 000, 750 об/мин и т. д. соответственно.
Ротор двигателя 2 на рис.2.1,а имеет короткозамкнутую обмотку в виде беличьей клетки 3 и находится во вращающемся со скоростью n1 магнитном поле, создаваемом обмоткой статора. Вращающееся магнитное поле, пересекая проводники ротора, наводит в них э. д. с., под действием которой в замкнутой накоротко обмотке ротора протекают токи, вокруг которых создается свое магнитное поле. В результате взаимодействия этих магнитных потоков, возникает потокосцепление, создающее момент М, увлекающий ротор в направлении вращения поля статора.
Электродвижущая сила роторной обмотки зависит от относительной скорости пересечения полем проводников ротора, которую принято называть скольжением асинхронной машины. Скольжение s, %, определяется по формуле (2.2)
![]() (2.2)
(2.2)
где n2 — скорость вращения ротора.
Электромеханические свойства АДК можно установить, рассматривая его механическую характеристику (кривая 1 на рис.2.1,6). При вращении ротора с синхронной скоростью n = n1, скольжение s = 0, соответственно равны нулю э. д. с. ротора и развиваемый машиной момент М. При увеличении нагрузки на валу ротор начинает отставать от поля, скольжение возрастает, что вызывает рост момента двигателя М до значения, определяемого нагрузкой на валу. При этом скорость несколько уменьшается, оставаясь близкой скорости n1. В пределах рабочих нагрузок характеристика асинхронного двигателя подобна характеристике двигателя с независимым возбуждением (кривая 1 на рис.1.3).
Однако при дальнейшем росте нагрузки механическая характеристика асинхронного двигателя все больше отклоняется от прямой, скорость уменьшается с возрастанием М все быстрее. При увеличении нагрузки на валу до значений, превышающих критический момент машины Ммакс. дальнейшее снижение скорости вызывает не возрастание момента двигателя, а его уменьшение и двигатель быстро останавливается.
Важным параметром АДК является пусковой момент Мп, который он развивает при n=0, т. е. в начале пуска. У АДК нормального исполнения пусковой момент намного меньше, чем критический момент Ммакс. Это обстоятельство осложняет пуск двигателей под нагрузкой, поэтому конструкторы принимают меры для увеличения пускового момента. С этой целью, например, можно увеличить сопротивление короткозамкнутой роторной обмотки, применив для ее изготовления сплав с большим удельным сопротивлением. Характеристика двигателя при увеличении сопротивления роторной клетки примет вид кривой 2 на рис.2.1,6. Рассматривая ее, можно установить, что при изменении сопротивления ротора критический момент не изменяется, пусковой момент увеличивается, но одновременно уменьшается скорость вращения двигателя в рабочей зоне характеристики и уменьшается к. п. д. двигателя. Двигатели, изготовленные с повышенным сопротивлением роторной клетки, называются двигателями с повышенным скольжением.
Другим способом увеличения пускового момента является изготовление ротора с глубокими пазами или с двойной беличьей клеткой. В этом случае сопротивление роторной обмотки переменно — при малых скоростях оно больше, чем в рабочей зоне. Характеристика двигателя с двойной беличьей клеткой представлена на рис.2.1,6 (кривая 3).
Кроме того, в специальном многоскоростном исполнении этот двигатель обеспечивает ступенчатое регулирование скорости (практически не больше четырех ступеней).
АДФ имеют на роторе трехфазную обмотку, аналогичную статорной. Зажимы обмотки ротора выведены на контактные кольца, поэтому в цепь ротора такого двигателя можно включать добавочные пусковые и регулировочные сопротивления, или тиристорный преобразователь. Схема включения двигателя с фазным ротором показана на рис.2.2,а. На рис.2.2,6 показаны механические n=f(M) и электромеханические n=f(I1) характеристики, где I1 — ток фазы статорной обмотки. Механическая характеристика 1 соответствует работе двигателя с замкнутыми накоротко кольцами. Сравнивая ее с кривой 1 на рис.2.1,6, можно убедиться, что они аналогичны по форме, но пусковой момент двигателя с фазным ротором при n = 0 обычно меньше, чем у короткозамкнутого.
Кривая 1' представляет соответствующую механической характеристике 1 зависимость n=f(I1). При включении добавочного сопротивления RД2 в цепь ротора пусковой момент двигателя увеличивается, а пусковой ток IП — уменьшается (кривые 2 и 2' на рис.2.2,6).
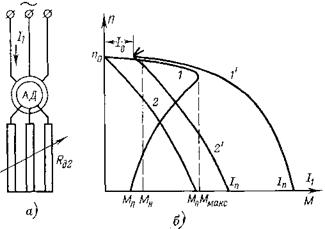
Рис.2.2. Схема включения АДФ (а); его характеристики (б).
Поэтому, вводя пусковой реостат в цепь ротора, можно получить достаточный пусковой момент при небольшом токе статора, а затем постепенно по мере разгона двигателя вывести его, замкнуть кольца накоротко и работать со скоростью, мало отличающейся от синхронной. Это важное преимущество АДФ перед АДК. При эксплуатации асинхронных двигателей необходимо учитывать, что при снижении напряжения сети пусковой и критический моменты снижаются пропорционально квадрату напряжения сети.
АДФ успешно применяются для механизмов, работающих с частыми пусками и остановками под нагрузкой и требующих регулирования скорости в первой зоне.
Благодаря простоте и надежности асинхронные двигатели получили на практике наиболее широкое применение, хотя их возможности до середины 20 века в отношении регулирования скорости были весьма ограничены.
Для построения естественной механической характеристики как АДК, так и АДФ, на практике используют упрощенную формулу Клосса:
 , (2.3)
, (2.3)
где Мi – текущий момент на валу двигателя, Нм; Мmax – максимальный или критический момент, развиваемый данным двигателем, Нм; si – скольжение, соответствующее текущему моменту, %; sk – критическое скольжение, %.
При практических расчетах используют обычно данные таблиц 3.1-3.5 [], в которых приведены пусковые свойства двигателей:
ü моменты в относительных единицах -  (2.4а, б,в)
(2.4а, б,в)
ü скольжение в % - sk ; sном
где Мп –пусковой момент конкретного двигателя, Нм; Мм. доп. – максимально допустимый при запуске двигателя момент (он может быть равен номинальному, но всегда меньше критического), Нм; Ммах - максимальный или критический момент, развиваемый данным двигателем, Нм; sном – номинальное скольжение, %; sk – критическое скольжение, %.
Для определения Мном нужно использовать формулу (1.1б) с номинальными значениями мощности и частоты вращения ротора кокретного двигателя. Для определения номинальной частоты вращения ротора нужно использовать формулу (2.2), заменив в ней понятие числа вращения ротора (n) на понятие частоты вращения ротора (![]() ).
).
С 70-х годов прошлого века появилось так называемое частотное регулирование. При этом способе регулирования обязательно выполнение закона, при котором
![]() =const (2.5)
=const (2.5)![]()
где ![]() - изменяемая частота напряжения питающей сети, Гц;
- изменяемая частота напряжения питающей сети, Гц; ![]() - изменяемая амплитуда напряжения питающей сети, В.
- изменяемая амплитуда напряжения питающей сети, В.
Выполнение этого закона позволяет сохранять жесткость рабочей части механической характеристики в обеих зонах, сохраняя при этом высокий к. п.д. и cos![]() .
.
Конструктивная схема СД представлена на рис.2.3,а. Статор 1 не имеет отличий от рассмотренного выше статора асинхронного двигателя. Его трехфазная обмотка создает вращающееся магнитное поле, которое взаимодействует с полем ротора 2, создаваемым обмоткой возбуждения. Через контактные кольца 3 обмотка возбуждения подключается к источнику постоянного тока. Постоянный ток IВ превращает ротор в постоянный магнит, который притягивается к соответствующему полюсу вращающегося магнитного поля и вращается с ним синхронно со скоростью n1. При увеличении нагрузки на валу ось ротора отклоняется на угол ![]() от оси вращающегося поля статора; силы притяжения, возрастая, вызывают увеличение момента двигателя М, но скорость остается постоянной. При достижении некоторого предела нагрузки ротор отрывается от вращающегося поля — двигатель выпадает из синхронизма. Поэтому механическая характеристика синхронного двигателя имеет вид, представленный на рис.2.3,б прямой 1.
от оси вращающегося поля статора; силы притяжения, возрастая, вызывают увеличение момента двигателя М, но скорость остается постоянной. При достижении некоторого предела нагрузки ротор отрывается от вращающегося поля — двигатель выпадает из синхронизма. Поэтому механическая характеристика синхронного двигателя имеет вид, представленный на рис.2.3,б прямой 1.
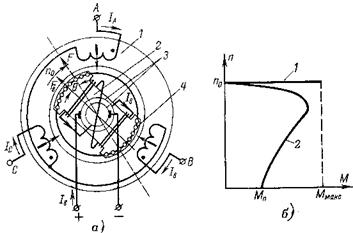
Рис.2.3 Конструктивная схема (а); характеристики (б) синхронного двигателя.
В процессе пуска синхронный двигатель работает как асинхронный. С этой целью на его роторе размещается короткозамкнутая пусковая обмотка 4. Пусковая механическая характеристика двигателя показана на рис.2.3,б (кривая 2).
СД различаются по конструкции ротора:
ü явнополюсный ротор с электромагнитным возбуждением; с возбуждением дополнительным постоянным магнитом; без дополнительного возбуждения;
ü неявнополюсный ротор.
В промышленности наибольшее применение находят СД с явнополюсным ротором с электромагнитным возбуждением мощностью более 250 кВт, которые в режиме перевозбуждения при холостом ходе используются как синхронные генераторы реактивной энергии (синхронные компенсаторы). Синхронные компенсаторы позволяют повысить коэффициент мощности всего предприятия, что, в свою очередь, позволяет повысить эффективность использования электроэнергии.
Варианты ДЗ №2
№ варианта | № диаграммы (см. рис.1.4) | М1, | М2, | М3, | М4 | t 1 | t 2, | t 3, | t 4, | n 2 |
Н*м | Н*м | Н*м | Н*м | с | с | с | с | об/мин | ||
бурцеы13 | е | 15 | 10 | 20 | 5 | 100 | 50 | 20 | 30 | 2997 |
сезонов15 | г | 10 | 5 | 3 | 2 | 400 | 200 | 300 | 100 | 749 |
Алгоритм выполнения контрольной работы №2
Дано:
M1=30 Н∙м; М2=50 Н∙м; М3=70 Н∙м; М4=60 Н∙м; t1=500 c; t2=300 c; t3=400 c; t4=8200c; n2=998об/мин; n1=1000об/мин. . Род тока и напряжения – переменный 380 В.
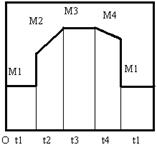
Рис.2.4 Заданная временная диаграмма моментов производства механизма
1.По заданным значениям моментов и времени и с учетом изменения нагрузки, показанной на заданной диаграмме (на данной диаграмме: М1и М3 - неизменяющиеся моменты за соответствующие промежутки времени t1 и t3, а М2 и М4 – изменяющие свое значение за соответствующие промежутки времени t2 и t4), строим временную диаграмму моментов для заданного механизма (рис.2.5).
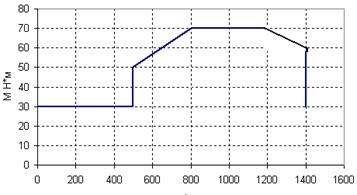
Рис.2.5 Временная диаграмма моментов для заданного механизма
2. Определяем продолжительность включения
ПВ=; (2.6)
3. Определяем эквивалентный момент по формуле 2.7. Из таблицы 2.1 выбираем коэффициент ![]() , учитывающий продолжительность включения двигателя:
, учитывающий продолжительность включения двигателя:
ПВ | 15 | 25 | 40 | 60 | 100 |
| 0,2 | 0,4 | 0,6 | 0,8 | 1 |
Мэкв=Н*м; (2.7)
где Mi - момент в определенный промежуток времени, Нм; ti - продолжительность данного промежутка, сек.; Σtраб - суммарное время работы двигателя, сек.; Σtn - суммарное время пауз в работе, сек.
Учитывая, что Σtn =0, получаем:
Мэкв= ![]()
![]()
![]()

4. Находим необходимую эквивалентную мощность, исходя из эквивалентного момента и заданной частоты вращения якоря:
![]() , Вт (2.8)
, Вт (2.8)
Рэ = 70 * 104,46 =7312,2
5. Находим заданное скольжение, используя формулу 2.2.
Sзад=(1000-998) 100%/1000=0.2%
6. Искомую номинальную мощность двигателя принимаем равной:
Pном=(1.1-1,3)∙PЭ
7. Из полученного интервала мощностей, номинальной частоты вращения, а также по скольжению по таблицам 2.1 – 2.6 [] выбираем двигатель, определяем его номинальные значения и пусковые свойства (таблицы 3.1 – 3.2). Выбран двигатель типа 4А132М6У3: Р=7,5кВт; nном= 970 об/мин; КПД=85,5; Sк= 26%; Sном= 3,2%; mmax= 2.5; mmin= 1.8; mп= 2.0
8. Строим естественную характеристику, используя формулы 2.3; 2.4а, б,в.[2]
Рис.2.6.Естественная механическая характеристика
9. Для определения требуемой зонности регулирования, выносим в большем масштабе рабочую часть естественной характеристики (прямая 1) на отдельный график, затем проводим прямую, соответствующую заданному скольжению (прямая 5 на рис.2.7), на которой отмечаем заданные в условии моменты. В данном случае имеем однозонное регулирование (искусственные характеристики расположены только во 2-ой зоне –прямые 2,3,4).
Рис.2.7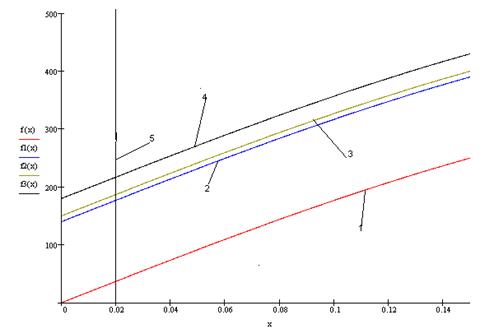
10. Способ регулирования, наиболее целесообразный в данном случае, это - регулирование частотой и амплитудой питающего напряжения.
Внимание:
1. Прежде, чем приступать к выполнению лабораторных работ, следует
- внимательно прочитать теоретическую часть;
-изучить порядок выполнения лабораторной работы, пользуясь принципиальной схемой стенда, приведенной на рисунке 3.5, так как данная схема, являясь принципиальной схемой стенда, применяется в лабораторных работах №1 и №2.
2. Построение характеристик во все трех работах следует производить в масштабе, пользуясь либо прикладными пакетами, либо вручную на миллиметровке.
[1] Жесткостью характеристики называется отношение приращения момента М2 к приращению скорости вращения вала двигателя ni. Абсолютно жесткой является характеристика, параллельная оси моментов. Такой характеристикой обладает синхронный двигатель с явнополюсным ротором с электромагнитным возбуждением.
[2] Для построения характеристики в пакете MahtLab целесообразно заменить в формуле 2.3. Мi на f(x), а si на x.
