
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Процедура синхронизации часов в СНРС «По Эйнштейну» и её последствия
ПРОЦЕДУРА СИНХРОНИЗАЦИИ ЧАСОВ В СНРС «ПО ЭЙНШТЕЙНУ» И ЕЁ ПОСЛЕДСТВИЯ
Имеется ли на самом деле сдвиг БШВ НС относительно СШВ? Как производится синхронизация часов в СНРС? Точно эта процедура в открытых источниках нигде не описана. В книге [13] (с.28, гл. "2.4. Синхронизация шкал времени") сказано: "В зависимости от процедуры нахождения величины дальности до i-го НС различают пассивные (СНРС типа GPS) и активные (СНРС типа ГЛОНАСС) методы сверки ШВ. Активный (запросный) метод более прост и позволяет получать более точные результаты, но требует установки дополнительной аппаратуры" Пассивный беззапросный метод, это лазерная локация уголковых отражателей, закреплённых на спутниках. В системе GPS используется только такой метод. В ГЛОНАСС помимо лазерной локации используется запросный метод. Я расспросил у специалистов на форуме, посвящённом ГЛОНАСС, что он из себя представляет? Мне в общих чертах пояснили так: На спутник посылается запросный сигнал в виде ПСП, синхронизированной с наземными часами системы. Спутник принимает её, переносит на частоту передачи и ретранслирует без изменений на Землю. Зная (по состоянию ПСП) время излучения сигнала, и время его приёма, определяют время двунаправленного прохождения сигнала. Задержки в аппаратуре измеряют на заводе-изготовителе и вычитают. То же самое происходит при лазерной локации - измеряется время двунаправленного прохождения сигнала. Запросный метод позволяет сделать процедуру всепогодной, а так же позволяет использовать передатчики меньшей мощности и менее чувствительные приёмники, чем при обычной радиолокации. Лазерная локация более точна, но не возможна в условиях наличия облачности. В ГЛОНАСС лазерная локация используется только для проверки и калибровки запросного канала. "Время двунаправленного прохождения сигнала делится пополам" - это всё, что мне удалось "разведать" у специалистов на форуме ГЛОНАСС. Что делают с полученной половиной? - точно не известно, но можно догадаться, исходя из имеющейся информации. Дело в том, что НС непрерывно излучает ПСП, синхронизированную с БШВ. Можно определить, при каком состоянии ПСП НС посылался запросный сигнал, и при каком состоянии он от него вернулся? Если разница между этими моментами по БШВ совпадает с разностью между моментами посылки и приёма запросного сигнала по СШВ, значит, часы на Земле и НС идут в одинаковом темпе (иначе делается коррекция темпа хода часов НС). Таким способом добиваются хода часов на НС и КИС в одинаковом темпе. Допустим, что интервалы времени по БШВ и СШВ совпали. Тогда надо ещё обеспечить правильный сдвиг БШВ относительно СШВ. "Деление пополам", это метод синхронизации, применяемый в СНРС GPS и ГЛОНАСС. Его называют "синхронизацией по Эйнштейну". По этой методике предполагается, что от НС до КИС ретранслированный запросный сигнал шёл половину времени двунаправленного прохождения. Исходя из этого предположения, осуществляют соответствующий сдвиг БШВ относительно СШВ. Состояние ПСП НС в момент возврата запросного сигнала соответствует моменту его ретрансляции (или отражения лазерного импульса). БШВ НС выравнивают так, чтобы момент ретрансляции запросного сигнала соответствовал половине измеренного времени двунаправленного прохождения сигнала. Согласно КЛФП время двунаправленного прохождения электромагнитного сигнала в вакууме не зависит от направления даже при наличии эфирного ветра, поэтому описанная процедура будет давать однозначный результат. Согласно КЛФП время двунаправленного прохождения электромагнитного сигнала при наличии эфирного ветра не зависит от направления и равно времени прохождения этого же маршрута в отсутствии эфирного ветра, делённому на релятивистский член (См. формулу (48) в ПРИЛОЖЕНИИ 18). Чтобы определить сдвиг БШВ относительно СШВ, который даёт описанная «процедура синхронизации по Эйнштейну», возьмём половину этого времени и вычтем из неё время прохождения данного расстояния в отсутствии эфирного ветра. (См. Рис 16 e):
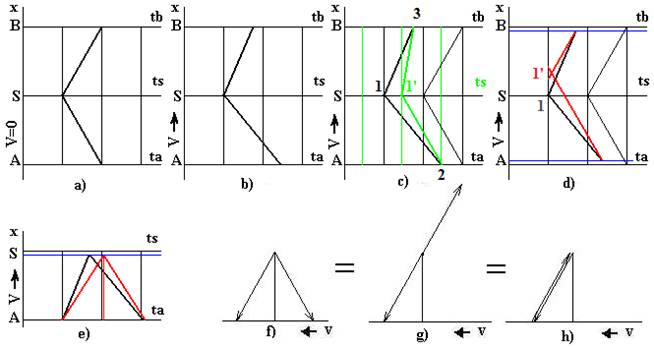
 . (54)
. (54)
Полученный сдвиг оказался в нужную сторону и близок по величине к сдвигу, необходимому для компенсации эфирного ветра согласно КЛФП (совместно со сдвигом координаты НС относительно истинной), определённому в предыдущем параграфе, и даже равен ему в одном из крайних значений направления эфирного ветра. Что это означает? Это значит, что решение навигационной задачи со сдвигом БШВ НС "по Эйнштейну" будет давать значение, близкое к требуемому, но так же и систематическую ошибку в определении расстояний. Оценим величину этой ошибки. Из формул (53), (54), следует, что в одном из крайних случаев направления эфирного ветра (реально такой случай не возникает) сдвиг БШВ "по Эйнштейну" совместно с виртуальным смещением координат даёт компенсацию эфирного ветра, то есть нулевую ошибку. В другом крайнем случае направления эфирного ветра, принимая во внимание, что в системе ГЛОНАСС L≈20000 км., β≈0.001 ошибка определения расстояния до НС составит:

То есть в зависимости от направления эфирного ветра ошибка определения расстояния до НС может меняться от 0 до 10 м.. Эта ошибка зависит от конфигурации группировки НС относительно потребителя и направления эфирного ветра, а, значит, будет меняться в течении суток и года. На сайте «Информационно-Аналитического Центра ГЛОНАСС» http://www. glonass-ianc. rsa. ru в реальном времени выводится результат решения навигационной задачи СНРС ГЛОНАСС. Типичный пример приводится ниже.

Рис.17
Видим, что центр случайного распределения результатов смещён относительно истинных координат примерно на 5 м.. Направление смещения меняется в течении суток и года, но всегда присутствует. Это значит, что помимо случайных ошибок в системе имеется систематическая ошибка и связана она с процедурой решения навигационной задачи почти «по Эйнштейну». В СНРС GPS картина точно такая же, поскольку применяется такой же метод синхронизации. Кроме сдвига БШВ в системе для компенсации эфирного ветра должен присутствовать ещё виртуальный сдвиг координат НС относительно истинных. Каким способом его вносят? Прежде чем что-то получить от системы, надо это что-то в неё вложить. Процедура формирования эфемерид в составе оперативной информации НС нигде не описана, но никто меня не убедит в том, что они формируются не тем же самым способом, каким потом определяется расстояние до НС. После выполнения процедуры синхронизации БШВ и СШВ расстояние до НС, закладываемое потом в качестве эфемерид, определяется по времени однонаправленного прохождения навигационного сигнала от НС до пункта с точно известными координатами. Это расстояние при помощи лазерной локации (КОС) определяется с сантиметровой и даже миллиметровой точностью. Однако, закладывают данные столь высокой точности в систему и получают на выходе неустранимую ошибку в 3-6 м.. Дело здесь не в точности измерения расстояния, и не в тропосферных/ионосферных задержках, на которые пытаются свалить наличие неустранимых ошибок в СНРС (можно подумать, что на лазерный дальномер КОС тропосфера и ионосфера влияния не оказывает), а в невозможности полностью скомпенсировать влияние эфирного ветра используемым способом.
12. Hatch, Ronald “Those Scandalous Clocks” GPS Solutions, (2004)
13. «Глобальная спутниковая радионавигационная система ГЛОНАСС» Под ред. , , М, ИПРЖР, 1998г., 398 с..
