
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Федеральное агентство по рыболовству
Федеральное государственное бюджетное образовательное
учреждение высшего профессионального образования
«Астраханский государственный технический университет»
Институт информационных технологий и коммуникаций
Кафедра Автоматизация
технологических процессов
ИССЛЕДОВАНИЕ СИСТЕМ ДИСТАНЦИОННОЙ
ПЕРЕДАЧИ ИНФОРМАЦИИ
Методические указания к лабораторным занятиям по курсу «Технические измерения и приборы» для студентов направления 220700.62 «Автоматизация технологических процессов и производств»
Астрахань 2014
Авторы: ассистент каф. АТП
Рецензент: к. т.н., доцент
Исследование систем дистанционной передачи информации: метод. указания к лабораторным занятиям по курсу «Технические измерения и приборы» для студентов направления 220700.62 «Автоматизация технологических процессов и производств» / АГТУ; Сост.: .- Астрахань, 2014.-18с.
Указания содержат сведения необходимые для изучения устройства и принципа действия систем дистанционных передач, приобретения практических навыков по экспериментальному исследованию.
Методические указания утверждены на заседании профильной методической комиссии «Автоматизация и управление»
«17 » марта 2014 г, протокол № 2
1. ЦЕЛЬ И СОДЕРЖАНИЕ РАБОТЫ
1.1. Цель работы:
Знакомство с устройством и принципом действия систем передачи показаний на расстояния, применяемых в практике различных производств.
Испытание систем передачи показаний на расстояние, представленных на стенде.
1.2. Содержание работы:
1. Изучение устройства и принципа работы сельсинной дистанционной передачи.
2. Изучение устройства и принципа действия пневматической дистанционной передачи.
3. Изучение устройства и принципа действия дифференциально-трансформаторной системы дистанционной передачи.
4. Проведение испытаний дифференциально-трансформаторной, сельсинной, пневматической систем дистанционных передач. Оценка их точности работы.
2. КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
2.1. Назначение и классификация систем дистанционных передач (СДП) и передающих преобразователей (ПП).
Результаты измерения какой-либо физической величины обычно выдаются измерительным прибором в виде угловых или поступательных перемещений (стрелки, шкалы, поплавка ).
Потенциометрическая следящая система на постоянном токе используется для передачи на расстояние угловых перемещений.
Сельсинная дистанционная передача на переменном токе так же предназначена для передачи угловых перемещений. В качестве передающего и принимающего сельсинов применяются самосинхронизирующиеся асинхронные электродвигатели с контактными кольцами или бесконтактные сельсины с без обмоточным ротором.
Для передачи линейных перемещений (поплавка уровнемера, мембраны манометра ) используют дифференциально-трансформаторную систему.
Ферродинамическая система используется как для передачи вращательного движения, так и для преобразования вращательного движения в поступательное и наоборот. Для передачи результатов измерения на большие расстояния, когда изменение параметров линии связи может повлиять на точность передачи, применяют системы телеизмерения, отличающиеся тем, что результаты измерения кодируются перед передачей их по линиям связи и дешифруются на пункте приема. Принцип действия число-импульсной системы состоит в том, что каждому значению измеряемой величины соответствует определенное число передаваемых по линии связи, импульсов тока.
Передающие устройства время-импульсной системы преобразуют измеренную величину в импульсы переменной продолжительности - такая модуляция называется широтной. Если система передает измеренную величину с помощью двух импульсов - то такая модуляция именуется фазовой.
Частотные системы применяются двух типов. Сигналы частотно-импульсной модуляции можно снимать с валиков измерительной системы. Частотная модуляция осуществляется на переменном токе, передающее устройство представляет собой генератор синусоидальных колебаний с переменной емкостью.
Дистанционное управление с работой силовых агрегатов позволяет экономить медь проводов, так как ток сигналов управления несоизмеримо меньше токов, протекающих в управляемых цепях. Наиболее распространены системы дистанционного управления двигателями различной мощности с помощью магнитных пускателей. Управление в общем случае сводится к пуску, останову и реверсированию электродвигателя.
Под телеуправлением подразумевают передачу на дальние расстояние сигналов, предназначенных для приведение в действие различных исполнительных механизмов. В электрических системах телеуправления используются токовые посылки с разными качествами. Для каждого качества существует свой способ селекционирования сигнала.
Существует несколько видов селекций : простая качественная селекция с амплитудным или полярным выбором; комбинированные системы (число комбинаций Rn ); для экономии числа линий - распределительная селекция; кодово-распределительная селекция; для одновременной передачи команд по одной линии связи используют передачу сигналов на различных частотах - уплотнение каналов связи.
Система дистанционной передачи информации включает в себя:
1) датчик, который преобразует снимаемую информацию для следующей дистанционной передачи;
2) линию связи (проводная, кабельная, оптическая или радиочастотная связь);
3) приемник передаваемого сигнала для дальнейшего практического применения.
Существует много разновидностей систем передач сигналов.
К системам дистанционной передачи результатов измерений, предъявляются обычные требования: точность, чувствительность и пр.
Существуют специфические требования.
1. Дистанционность, которая характеризует степень самой возможности передачи данных. Например, в преобразованной в электрический сигнал информации могут произойти искажения из-за угла тока, межпроводной емкости. В численном отношении этот параметр показывает длину кабеля (или жгута) с конкретными параметрами.
2. Реактивное воздействие. Во время работы системы дистанционной передачи преобразователь сигнала от датчика может оказать на сам датчик некоторое реактивное воздействие: помехи, наводки, случайно проскакивающие в цепь датчика. Сама возможность этого дефекта исключается в ходе производства и отладки регулировкой чувствительности датчика.
3. Взаимозаменяемость. Речь идет о допуске, в пределах которого один прибор можно заменить на другой из такого же класса.
2.2. Дифференциально-трансформаторная дистанционная передача
Схема дифференциально-трансформаторной дистанционной передачи представлена на рисунке 1.
В систему входят два идентичных преобразователя, один из которых находится в первичном приборе Д, а другой – во вторичном приборе П. Каждый из преобразователей имеет одну первичную 1 и две вторичных II обмотки. Первичные обмотки датчика и приемника соединены последовательно и питаются переменным током от силового трансформатора (25В или 33В).
Вторичные обмотки включены встречно с выходом на электронный усилиБлагодаря встречному включению секций вторичных обмоток, наводимые в них Э. Д.С. смещены по фазе на 180°. Когда сердечник 1 датчика находится в среднем (нейтральном) положении Э. Д.С. е1 и е2, индуктируемые в каждой из вторичных обмоток, равны и направлены навстречу друг другу.
Следовательно, разность Э. Д.С. во вторичных обмотках равна нулю:
DU = е1 – е2 = 0
Если сердечник 2 вторичного прибора также находится в среднем положении, то разность Э. Д.С. во вторичных обмотках этой катушки тоже равна нулю:
DU2 = е3 – е4 = 0
Следовательно, напряжение на входе электронного усилителя 3 равно
DU = DU1 – DU2 = 0 и система находится в состоянии покоя. Измеряемый параметр Xвх воздействует на чувствительный элемент (мембрана, трубчатая пружина) первичного прибора, который механически связан с плунжером (сердечником). Изменения Xвх вызывает изменение положения сердечника.
При смещении сердечника первичного прибора от среднего положения изменится распределение магнитных потоков во вторичных обмотках преобразователя Д и индуктируемые в них Э. Д.С. е1 и е2 не будет соответствовать друг другу. Следовательно, на вход усилителя будет подан сигнал, равный разности: DU = DU1 – DU2.
Величина напряжения является функцией линейного перемещения сердечника преобразователя, а его фаза - функцией направления перемещения от среднего положения. Возникающее напряжение разбаланса усиливается усилителем по напряжению и по мощности и поступает на обмотку управления электродвигателя М. Последний, вращая кулачок 4 перемещает сердечник 2 вторичного прибора до тех пор, пока не исчезнет сигнал разбаланса DU. Таким образом, каждому положению сердечника 1 первичного прибора соответствует определенное положение сердечника 2 вторичного прибора.
Дифференциально-трансформаторные системы дистанционной передачи имеют более мощный выходной сигнал, небольшие нагрузки на сердечник первичного прибора, благодаря чему чувствительный элемент не вносит искажений в результат измерений.
Достоинства дифференциально-трансформаторной системы передач:
а) удобство вывода сигнала из области высокого давления и агрессивных сред;
б) малая реактивная нагрузка на чувствительный элемент при большом выходном моменте на вторичном приборе;
в) простота подключения первичного преобразователя к измерительной системе первичного прибора и малые габариты катушки;
г) высокая чувствительность и хорошая линейность системы передачи.
К недостаткам относятся:
а) отсутствие взаимозаменяемости, необходимость индивидуальной подгонки каждого элемента комплекта;
б) уменьшение надежности системы из-за наличия многокаскадного усилителя;
в) влияние емкости линии практически ограничивает радиус действия до одного километра;
г) сильное влияние посторонних магнитных полей и ферромагнитных масс.
Дифференциально-трансформаторные катушки в зависимости от их назначения выпускаются с ходом сердечника от 1 до 30 мм. Для катушек, работающих с дифманометрами, стандартная величина хода сердечника лежит в пределах ±5 мм, а для катушек, работающих с ротаметрами ±10 мм. Для регулирования величины входного напряжения катушки, сердечник в отдельных случаях изготавливается из двух свинчивающихся половин. Основная погрешность дифференциально-трансформаторной системы при передачи сигнала на расстояние 250 м от 0,5 до 1% и на расстояние до 1 км – 2,5%. Дифференциально-трансформаторные преобразователи применяются в устройствах измерения давления, расхода, уровня и других параметров, значения которых могут быть преобразованы в перемещения сердечника катушки первичного прибора.
2.3. Сельсинная дистанционная передача
В ряде случаев возникает необходимость передавать на расстояние сигналы преобразователя в виде нескольких оборотов выходной оси преобразователя или линейного перемещения в несколько метров.
В частности, такая задача ставится при передаче показаний уровнемеров. Решение подобных задач возможно посредством сельсинных передач.
Сельсин предоставляет собой миниатюрную трехфазную электрическую машину, сходную с синхронным генератором или двигателем.
Статор сельсина имеет одну обмотку (обмотка возбуждения), а ротор три обмотки (обмотка синхронизации), оси которых сдвинутых на 120°. Существует другая модификация сельсинов – с трехфазной обмоткой возбуждения.
Сельсины подразделяют в зависимости от выполняемой функции в схемах передачи угла. Сельсин, поворотом ротора которого задается передаваемый угол, называют сельсин-датчиком, а сельсин, ротор которого воспроизводит передаваемый угол, называют сельсин-приемник. Различают два режима работы сельсинов – индикаторный и трансформаторный.
Схема индикаторной связи приведена на рис. 2.
Будем считать, что оба сельсина совершенно одинаковы и от одного датчика питается только один приемник
При питании обмоток возбуждения датчика и приемника переменным током возникают пульсирующие потоки возбуждения Фвд и Фвп, которые индуцируют в обмотках синхронизации ЭДС (Ед1,..., Еп3). Величина каждой ЭДС зависит от углового положения соответствующей обмотки относительно оси поля возбуждения. Если принять гармонический закон распределения индукции магнитного поля, то:

Здесь Еm - максимальное значение ЭДС, которое получается при соосном положении обмотки синхронизации и обмотки возбуждения. Из рис. 2 видно, что в любой момент времени ЭДС одноименных фаз датчика и приемника направлены встречно. Если сельсины находятся в согласованном положении, ЭДС одноименных фаз датчика и приемника равны по величине и уравновешивают друга.
При повороте датчика на угол αд равенство ЭДС нарушается. По обмоткам синхронизации и линиям связи протекают токи, которые, взаимодействуя с потоками возбуждения, создают моменты, в равной мере действующие на вал датчика и приемника. Поскольку датчик обычно фиксируется, приемник будет поворачиваться в ту же сторону и на такой же угол, ибо только при согласованном положении ЭДС вновь будут уравновешивать друг друга.
Простейшая схема работы сельсинов в трансформаторном режиме показана рис. 3, где УПУ – усилительно-преобразовательной устройство; СД – силовой двигатель; О – объект управления
Однофазная обмотка возбуждения сельсина-датчика создает пульсирующий магнитный поток Фвд, который индуцирует в обмотках синхронизации ЭДС:

Под действием ЭДС по обмоткам и линиям связи протекают токи, обобщенное выражение которых будет Iф= Eф/2Zф. Здесь индекс "ф" означает ток, ЭДС и полное сопротивление фазы ротора плюс половину сопротивления линии. Токи, протекая по фазам приемника, создают результирующую НС приемника Fрп. Ее пространственное положение зависит от положения обмоток синхронизации датчика и приемника относительно своих обмоток возбуждения. За исходное принимается такое положение, при котором эта НС будет п е р п е н д и к у л я р н а обмотке возбуждения приемника.
При повороте датчика на какой-то угол αд на такой же угол, но в обратную сторону повернется результирующая НС приемника. Продольная составляющая этой НС Fрпd наведет в обмотке возбуждения приемника ЭДС, которая через усилительно-преобразовательное устройство (УПУ) будет воздействовать на силовой двигатель (СД). Тот придет во вращение и начнет поворачивать объект управления (О), а вместе с ним и ротор сельсина-приемника до тех пор, пока результирующая НС Fрп не повернется на заданный угол, т. е. снова не станет перпендикулярной оси обмотки возбуждения приемника, ибо только в этом положении в ней не будет ЭДС и двигатель перестанет вращаться.
Точность трансформаторных сельсинов-приемников определяется так же, как и точность индикаторных сельсинов-датчиков, т. е. ошибкой асимметрии, в зависимости от которой трансформаторные сельсины-приемники делятся на семь классов точности.
Качество работы трансформаторной схемы зависит от ряда факторов: 1) удельного выходного напряжения - Uу; 2) остаточного выходного напряжения - UО; 3) удельной выходной мощности - Ру.
У д е л ь н о е выходное напряжение - напряжение при q = 10, определяет чувствительность всей системы. Повысить его значение можно путем увеличения числа витков обмотки возбуждения, разумеется, до определенных пределов, ибо при чрезмерном увеличении Wв возрастает внутреннее сопротивление обмотки, увеличивается внутреннее падение напряжения и снижается выходная мощность сельсина. Кроме неявнополюсной конструкции, трансформаторные сельсины отличаются от индикаторных еще и большим числом витков обмотки возбуждения.
О с т а т о ч н о е напряжение - напряжение на обмотке возбуждения при отсутствии угла рассогласования. Оно обуславливается магнитной связью результирующей НС приемника и перпендикулярной ей обмоткой возбуждения, которая возникает вследствие погрешностей изготовления, наличия потоков рассеяния и других причин, главным образом технологического характера. Обычно U0 = 0,2 – 0,5 В.
У д е л ь н а я выходная мощность - мощность приq = 10. Чем выше этот показатель, тем раньше начинает работать усилитель, тем выше становиться чувствительность системы.
2.4. Пневматические системы передачи
Принципиальная схема дистанционной пневматической передачи показана на рис. 4. Как видно из упрощенной схемы пневмопередачи сжатый воздух подается по трубам 1 через фильтр 2 в редуктор 3.
Здесь давление снижается и поступает через постоянный дроссель 4 к отверстию сопла 5. Дроссель представляет собой тонкую короткую трубку диаметром 0,2. Диаметр отверстия сопла больше отверстия дросселя, чтобы при открытом сопле давление в системе сопла за дросселем не возрастало. В результате поворота стрелки 18 прибора отклоняется заслонка 6, связанная со стрелкой через систему рычагов 11, 12, 13, давление в системе воздухопровода 7 меняется: увеличивается, если отверстие сопла прикрывается заслонкой и уменьшается, если оно открыто. Это изменение давления через пневматический усилитель передается вторичному прибору 9, связанному с системой датчика воздухопровода 8.
Механизм жестокой обратной связи состоит из сильфона 10 и рычагов 14, 15, 16 и осуществляет обратное воздействие воздуха (поступающего на вторичный прибор) на заслонку, что обеспечивает пропорциональность между измеряемым давлением и давлением в трубопроводе 8. Под действием измерительной системы заслонка приближается к соплу (или удаляется), а под действием обратной связи в результате деформации сильфона 10, она отводится от сопла (или приближается) на некоторое расстояние, но это расстояние меньше того, на которое заслонка приблизилась бы к соплу (или отошла) под действием одной только измерительной системы датчика. Каждому значению измеряемой величины между нулем и максимумом соответствует строго определенное положение заслонки относительно сопла и, следовательно, строго определенное давление воздуха, поступающего на вторичный прибор. Это давление для систем с усилителями на сильфонах меняется в пределах от 0 до 100 кПа, с усилителями от 20 до 100 кПа (на мембранах).
3. ПОРЯДОК И МЕТОДИКА ВЫПОЛНЕНИЯ РАБОТЫ
3.1. Определить технические характеристики приборов и заполнить таблицу
№ | Тип прибора | Класс точности | Предел измерения | Цена деления | Выходной сигнал | Входной сигнал |
3.2. Исследование режимов работы сельсинной системы дистанционной передачи
Тумблером 7 включить питание лабораторной установки. Ручка переключателя SA 1 на стенде вторичных приборов переводится в положение 1. Загораются сигнальные лампы, свидетельствующие о подключении сельсина-датчика и сельсина-приемника.
Переключатель SA 2 на стенде первичных приборов переводится в индикаторный режим.
Переключатель 9 устанавливается в положение, соответствующее сопротивлению Rл = 5 Ом.
Стрелка сельсина-датчика устанавливается на заданную поверяемую отметку.
Показания снимаются с сельсина-приемника.
Поверку показаний выполнить при прямом и обратном ходе стрелки прибора. Результаты замеров занести в таблицу и вычислить погрешности.
Повторить поверку тех же отметок прибора при другом сопротивлении Rл.
Перевести ключ SA 2 в трансформаторный режим работы сельсинов – стрелка приемника должна установиться на отметку 90°, т. к. только при таком взаимном расположении обмоток возбуждения и синхронизации наводимая Э. Д.С. в обмотке возбуждения минимальная.
Эту отметку считать за начало шкалы (нуль).
Сопротивление | Режим работы | Показания сельсина-датчика | Показания сельсина-приемника | Погрешности | Вариация | ||||
Абсолютная | Приведенная | ||||||||
Прямой ход | Обратный ход | Прямой ход | Обратный ход | Прямой ход | Обратный ход | ||||
Ом | град | град | град | град | град | % | % | град | |
Поверку выполнить для тех же отметок при сопротивлении Rл = 5 Ом, а затем при другом сопротивлении.
Результаты замеров записать в ту же таблицу и вычислить погрешности.
3.3. Исследование дифференциально-трансформаторной дистанционной передачи
Переключатель SA 1 перевести в положение 2. Загораются сигнальные лампы, свидетельствующие о подключении первичного и вторичного приборов дифференциально-трансформаторной дистанционной передачи. Переключатель 6 на стенде вторичных приборов перевести в положение, соответствующее Rл = 20 Ом.
Переключатель панели управления 3 перевести в ручной режим работы (на стенде). Ручкой редуктора панели дистанционного управления установить стрелку манометра этой панели на первую поверяемую отметку. Показания снимать со шкалы прибора КСД 2.
Поверку выполнить в пределах 0¸1 кгс/см2 при прямом и обратном ходе стрелок прибора.
Показания, полученные на шкале вторичного прибора перевести в единицы давления, заполнить таблицу и вычислить погрешности.
Сопротивление | Показания первичного прибора | Показания вторичного прибора | Погрешности | Вариация | ||||
Абсолютная | Приведенная | |||||||
Прямой ход | Обратный ход | Прямой ход | Обратный ход | Прямой ход | Обратный ход | |||
Ом | град | град | град | град | град | % | % | град |
Поверку тех же отметок прибора повторить при другом сопротивлении Rл.
3.4. Исследование пневматической дистанционной передачи
Переключатель SA 1 перевести в положение 3. Загораются сигнальные лампы, свидетельствующие о подключении первичного и вторичного приборов пневматической дистанционной передачи.
Установить давление питания 1,1 или 1,4 кгс/см2 редуктором давления. Заданное значение измеряемого давления устанавливается редуктором панели дистанционного управления 6 (рис. 5). Переключатель панели перевести в ручной режим работы.
Поверку показаний выполнить при прямом и обратном ходе стрелки прибора. Результаты поверки записать в таблицу и вычислить погрешности.
Сопротивление | Показания первичного прибора | Показания вторичного прибора | Погрешности | Вариация | ||||
Абсолютная | Приведенная | |||||||
Прямой ход | Обратный ход | Прямой ход | Обратный ход | Прямой ход | Обратный ход | |||
Ом | град | град | град | град | град | % | % | град |
4. ОФОРМЛЕНИЕ ОТЧЕТА ПО РАБОТЕ
Отчет должен включать:
1. Краткое описание работы (цель, содержание, характеристики приборов).
2. Принципиальные схемы дистанционной передачи (по указанию преподавателя).
3. Протоколы (таблицы) испытания дистанционных передач.
5. КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Какой принцип действия сельсинной передачи в индикаторном режиме?
2. Можно ли в принципе осуществлять передачу сигнала в обратном направлении, т. е. от сельсина-приемника к сельсину-датчику?
3. Влияет ли на точность передаваемого сигнала сопротивление соединительных линий в сельсинной дистанционной передаче?
4. Какое напряжение используется для питания серийных приборов в сельсинной передаче?
5. Принцип действия сельсинной передачи в трансформаторном режиме.
6. Принцип работы дифференциально-трансформаторной системы дистанционной передачи.
7. Как соединяются вторичные обмотки трансформатора друг с другом?
8. Какое напряжение применяют для питания измерительной схемы дифференциально-трансформаторной дистанционной передачи?
9. Для какой цели служит реверсивный двигатель в дифференциально-трансформаторной дистанционной передачи?
10. Влияет ли на точность передаваемого сигнала сопротивление соединительных линий в дифференциально-трансформаторной дистанционной передаче?
11. Из каких основных элементов состоит пневматическая система?
12. Какую роль выполняет каждый из элементов в системе пневмопередачи?
13. Какой принцип действия и работа пневматической системы дистанционной передачи?
14. Каковы достоинства и недостатки систем пневмопередачи (сравнить с электрическими)?
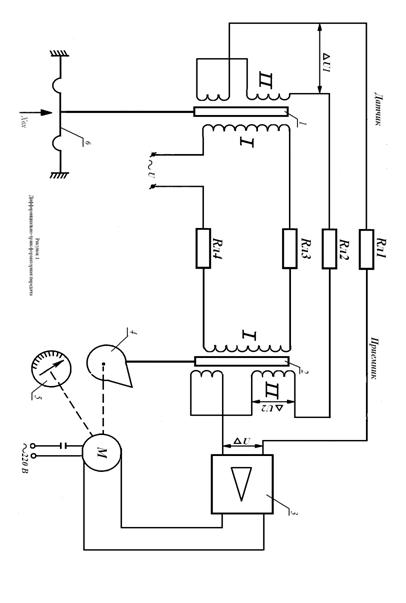
Рис. 1. Дифференциально-трансформаторная передача
Рис. 2.- Индикаторный режим работы сельсинной передачи
Рис. 3.-Трансформаторный режим работы сельсинной передачи
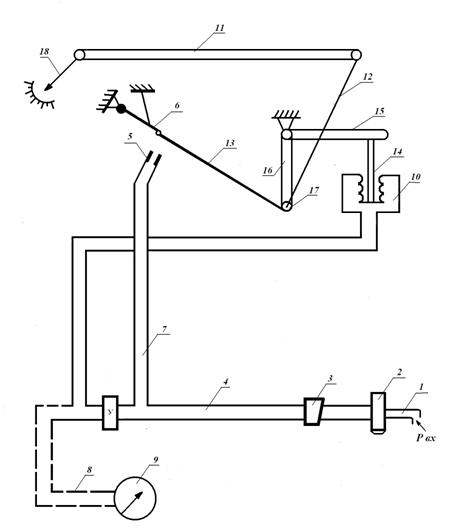
Рис. 4.- Пневматическая система передачи
6. ОБРАБОТКА РЕЗУЛЬТАТОВ ПОВЕРКИ ПРИБОРОВ
1. Абсолютная погрешность
D1 = А1 – А0,
D2 = А2 – А0
где А0 – действительное значение измеряемой величины
А1 и А2 – показания прибора при прямом и обратном ходе стрелки.
2. Приведенная относительная погрешность
 [%], где
[%], где
АК и АН – значения измеряемой величины, соответствующие конечной и начальной отметкам шкалы прибора.
По допустимой приведенной погрешности определяется класс точности прибора.
![]()
3. Вариация прибора в абсолютном выражении определяется как разность показаний прибора, полученных для одной и той же отметки шкалы прибора при прямом и обратном ходе стрелки.
n = |Апр – Аобр|
4. Приведенная вариация
7. ИСПОЛЬЗОВАННАЯ ЛИТЕРАТУРА
1. , , Чистяков измерения и приборы: учебник для вузов, 3-е изд., стереотип. Издательство: Издательский дом МЭИ (2007) ISBN: 978-5-383-00155-4 Объём: 460 стр.
2. Технические измерения и приборы. Часть1. Измерение теплоэнергетических параметров: Учебное пособие для студентов дневной и заочной формы обучения специальности 220301 «Автоматизация технологических процессов и производств»/ , . – Ангарск, АГТА, 2008. – 200с.
3. , Методы и средства измерений Учебник Рекомендовано Учебно методическим объединением по образованию в области приборостроения и … — М. : Издательский центр «Академия», 2010.-336с.
4. Кулаков измерения и приборы для химических производств: Учебник.- 4-е изд., стер.- М.: Альянс, (гриф МО), 2008.. – 424с.
