
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рисунок 3 – Двухосная и трехосная тележки и их основные элементы
Из опыта, накопленного в локомотивостроении, известно, что для защиты тягового двигателя, снижения динамического момента в приводе, уменьшения неподрессоренного веса, увеличения к. п.д. и тяговых свойств электровоза, необходимо применять тяговый привод III класса. В рамках концепции привода III класса разработаны конструктивные решения, позволившие увеличить долговечность зубчатых колес и подшипников редуктора, подшипников тягового двигателя за счет рационального расположения шестерни редуктора относительно опорных подшипников, снизить массу ТД.
Известно, что при заданной мощности и электромагнитных нагрузках, характеризующих в первую очередь тепловую нагрузку электрической машины, объем активного ядра обратно пропорционален номинальной частоте вращения, поэтому при увеличении частоты вращения масса тягового двигателя снижается.
Благодаря применению редуктора с двухопорной шестерней, симметрично расположенной относительно опорных подшипников, и зубчатых колес с небольшим углом наклона зубьев, удалось увеличить передаточное отношение редуктора, увеличить частоту вращения ротора ТД, что позволило снизить массу двигателя. При одинаковой мощности 1200 кВт, тяговый двигатель НТА-1200 электровоза ЭП10 весит 2600 кг, а тяговый двигатель ДТА-1200А нового скоростного пассажирского электровоза ЭП20 – 1950 кг.
На основании выполненных расчетных работ по исследованию прочности зубчатой передачи, долговечности подшипников вала шестерни, впервые в России разработан интегрированный тяговый привод III класса, схема которого показана на рис. 4. Тяговый двигатель и тяговый редуктор объединены в единый блок мотор-редуктора (рис. 5), что позволило максимально эффективно использовать свободное пространство между внутренними торцами колес в колесной паре и снизить суммарный вес тягового привода.
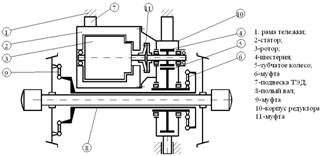
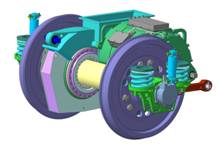
Рис. 4 – Схема интегрированного тягового Рис. 5 – Колесно-моторный блок
привода III класса
Кроме того, впервые применены в конструкции пассажирского электровоза для ОАО «РЖД»: одноповодковая букса с кассетным подшипником, не требующими обслуживания до пробега 1 млн. км; цельнокатаное безбандажное ходовое колесо с установленными на нем тормозными дисками; рама двухосной тележки с прогнутыми боковинами.
Наряду с новыми конструктивными решениями, применены хорошо отработанные, такие как опоры типа «флексикойл» в подвешивании кузова на крайних тележках; раздельное по видам колебаний демпфирование кузовной ступени подвешивания; передача сил тяги и торможения от каждой тележки к кузову посредством наклонных тяг, работающих на сжатие – растяжение; применение высокоэффективной системы смазки гребней ходовых колес.
Для обеспечения нормативных показателей по торможению с высокой скорости, в конструкции электровоза впервые в России применен дисковый тормоз с установкой тормозных дисков на колесе. Такая конструкция увеличивает ресурс колес за счет исключения механического и термического воздействия тормозных колодок на круг катания, но при этом увеличивает неподрессоренный вес колесной пары на 380 кг и требует применения одноповодковой буксы.
В случае применения одноповодковой буксы возникает необходимость выбора параметров вертикальной, продольной и поперечной связи колесной пары с рамой тележки и проверка их при моделировании движения электровоза.
Отметим, что одним из следствий применения асинхронного тягового привода является увеличение веса и объема электрооборудования, размещаемого в кузове. Например, вес электрооборудования, находящегося в кузове электровоза ЭП10, на 25% больше, чем вес электрооборудования, установленного в кузове электровоза ЭП1, оснащенного коллекторными ТЭД. Частично разница в весе электрооборудования компенсируется более легкими асинхронными тяговыми двигателями, но при этом происходит перераспределение веса между кузовом и тележками. Вес кузова с оборудованием возрастает, а вес тележек уменьшается. Это приводит к увеличению высоты центра тяжести электровоза в целом, что негативно отражается на показателях динамики и воздействия на путь, особенно в кривых участках пути.
Проблема перераспределения веса между кузовом с оборудованием и тележками в сторону увеличения первого и снижения для второго еще более актуальна для высокоскоростных электровозов с АТП, поэтому на стадии их проектирования необходимо предусмотреть эффективные меры по обеспечению нормативных показателей динамики и воздействия на путь. Должны быть выбраны оптимальные характеристики рессорного подвешивания и систем демпфирования, осуществлены мероприятия, направленные на снижение веса металлоконструкций кузова, которые должны обеспечить требуемые весовые показатели электровоза без ущерба для прочности. Эффективной мерой по снижению веса металлоконструкций является применение кузова несущей конструкции, обеспечивающего снижение массы без ущерба для нормативных показателей прочности.
Описанные выше решения легли в основу конструкции экипажной части скоростного пассажирского электровоза ЭП20, оснащенного АТП.
Третья глава «Построение компьютерных моделей различных вариантов ходовой части электровоза» посвящена разработке компьютерных моделей двух основных вариантов экипажной части, формулировке критериев оценки устойчивости движения, взаимодействия экипажа и пути.
Формальный метод Ньютона-Эйлера позволяет генерировать дифференциальные уравнения движения системы N взаимосвязанных твердых тел (СТТ) с большим числом степеней свободы наиболее эффективным образом, с наименьшими затратами вычислительных ресурсов.
Дифференциальные уравнения движения СТТ, образующих расчетную схему локомотива, обладающей Ns степенями свободы, имеют матричную запись вида:
![]()
где ![]() – матрица-столбец обобщенных (лагранжевых) координат;
– матрица-столбец обобщенных (лагранжевых) координат;
![]() – матрица масс;
– матрица масс;
![]() ,
, ![]() – матрицы-столбцы инерционных и активных сил.
– матрицы-столбцы инерционных и активных сил.
Компьютерная модель экипажной части электровоза на двухосных тележках (осевая формула 20-20-20, рис. 6), состоит из следующих тел: кузова; трех рам тележек; трех наклонных тяг; шести колесных пар; шести буксовых узлов (по две буксы, объединенные в одно тело); шести мотор-редукторных блоков; шести роторов; шести зубчатых колес; шести полых валов. Таким образом, модель состоит из 43 тел.
Модель электровоза на трехосных тележках (осевая формула 30-30, рис. 7) отличается количеством рам тележек и наклонных тяг, которых в модели по две, таким образом, модель электровоза на трехосных тележках состоит из 41 тела.
|
|
Рис. 6. Модель экипажной части 20-20-20 | Рис. 7. Модель экипажной части 30-30 |
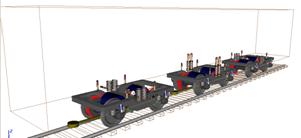
Компьютерные модели двух вариантов экипажной части (рис.6 и рис.7) разработаны в программном комплексе «Универсальный Механизм», в основе которого лежит формальный метод Ньютона-Эйлера. Модели созданы с использованием метода подсистем. В основе конструкций двухосной и трехосной тележек находится подсистема КМБ – колесно-моторный блок, которая показана на рис.5.
Особое внимание уделено построению модели механического тягового привода. Зубчатая передача задана силой типа «зубчатые колеса», которая характеризуется передаточным число iReductor, зазором в зацеплении gearclearance, коэффициентом диссипации GearDamping, коэффициентом жесткости GearStiffness, углом зацепления.
Связь зубчатого колеса и полого вала (см. схему рис. 4) задана линейными силами, типа «упруго-вязкий элемент», жесткость элементов задана в виде матрицы жесткостей, линейная жесткость cxBushingGear; cyBushingGear.
Диссипативные свойства связи зубчатого колеса с полым валом заданы линейной силой типа «диссипативный элемент», ее свойства dxBushingGear, dyBushingGear, daxBushingGear, dayBushingGear заданы матрицей силового элемента.
Аналогичным образом заданы характеристики муфты, связывающей полый вал и колесо.
В работе приводятся значения массо-инерционных характеристик тел, входящих в состав расчетной схемы ходовой части электровоза, и параметры упруго-диссипативных связей – пружин, демпферов, сайлент-блоков и т. п.
Моделирование сил, возникающих в контакте между колесом и рельсом, представляет собой одну из основных задач при исследовании движения локомотивов. В соответствии с реальными условиями эксплуатации, моделирование движения электровоза осуществлялось на рельсах Р65, в прямых участках пути, кривых радиусом 350 м, 650 м, 1000м и 1500м в стрелочном переводе марки P65 1/11 при пошерстном и противошерстном движении. Профиль нового рельса Р65 был принят согласно ГОСТ 8161-75, а профиль нового колеса – согласно ГОСТ 11018-2000.
Оценка воздействия на путь и динамики экипажа производились по следующим критериям:
- коэффициенты вертикальной динамики (для 1-й и 2-й ступеней подвешивания),
- рамные силы,
- боковая нагрузка колеса на рельс по условию прочности раздельных рельсовых костыльных скреплений,
- боковые силы в стрелочных переводах,
- вертикальная нагрузка от колес на рельсы,
- удельная на метр пути работа сил трения в контактах колеса и рельса (по кругу катания и в контакте гребня).
При проектировании скоростных локомотивов важным фактором является оценка устойчивости в прямых участках пути. Для этого применяют различные критерии, в первую очередь это критическая скорость. Критическая скорость определяется как пороговое значение скорости, при котором начинается резкое нарастание поперечных колебаний экипажа. Движение со скоростью, при которой происходят резкие поперечные колебания, влияет на износ и усталостную прочность элементов конструкции железнодорожного экипажа, а также на безопасность движения. Поэтому необходимо, чтобы критическая скорость экипажа существенно превышала его эксплутационную скорость.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
