
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 004.896
Концепция и конструктивные особенности бытового робота-автомойщика
,
Идеи создания универсального автомата, способного заменить человека в производственных процессах, сформировались за два тысячелетия до рождения мехатроники с элементами адаптивного управления. В наше время есть объективные доводы и свидетельства в пользу того, что в некий момент такие автоматы, - роботы, - войдут в повседневное бытование людей. Очевидно, что производство бытовых роботов будет чрезвычайно эффективным в коммерческом плане, и одно это обстоятельство оправдывает риски инвестирования в развитие идей в области создания адаптивных электромеханических систем (ЭМС).
Согласно современному определению робота [3], бытовым роботом может быть машина-автомат, предназначенная для воспроизведения двигательных и умственных действий человека при выполнении им операций с объектами жизнеобеспечения, адаптирующаяся к изменениям среды обитания человека и самообучающаяся в процессе взаимодействия с ней.
Такой робот в настоящее время неизбежно будет дорогостоящим изделием и его применение будет оправдано только при замещении людей в особо трудоемких процессах и опасных для людей ситуациях.
Второе ограничение применимости бытовых роботов – риски нанесения вреда окружающим людям и имуществу из-за недостаточной точности воспроизводства роботами состояния окружающей среды.
Таким образом, коммерциализируемые бытовые роботы должны быть узкоспециализированными, а место их применения должно быть недоступным для людей. Учитывая, также, требования технической выполнимости и широкой применимости бытового робота, и сопоставляя их с характеристиками бытовых операций, получаем наибольшее соответствие для мытья автомобиля во время его нахождения в гараже или на автостоянке. Еще одно важное обстоятельство - функциональность такого робота-автомойщика практически совпадает с функциональностью промышленных роботов, замещающих человека на покраске или на сварке, для которых уже решены вопросы локомоторного обеспечения функциональности.
Например, в [1] представлены результаты разработки алгоритмического и программного обеспечения моделирующего комплекса для натурной имитации движения манипуляторов, с помощью которых был создан стенд-тренажер для моделирования в масштабе реального времени движений схвата большого космического манипулятора (БКМ) – бортового манипулятора космического корабля “Буран”, исследованы динамика БКМ и особенности управления манипулятором в ручном и автоматическом режимах, проведена натурная отработка задач захвата, перемещения и установки объектов с помощью БКМ в различных режимах управления. Тогда же были разработаны методы моделирования динамики манипуляторов с нелинейными элементами в приводах, эффективный в вычислительном плане метод формирования и расчета коэффициентов уравнений динамики манипуляторов в форме уравнений Лагранжа II рода. На основе неявных методов разработаны эффективные алгоритмы для интегрирования уравнений динамики манипуляторов с нелинейностями в моделях приводов и упругими элементами в шарнирах. В целом, полученные результаты позволяют создать математические модели реальных конструкций манипуляционной части робота, способного без ограничений и с высокой точностью перемещать рабочий орган в пространстве.
В [4] представлены результаты разработки системы управления манипулятором робота-сварщика, обеспечивающей быструю настройку параметров управления для заданной траектории движения сварочной горелки, задаваемой аналитически функцией перемещения горелки во времени или оператором множеством полученных экспериментально точек. Применительно к проблеме создания робота-автомойщика ценно то, что в работе решены задачи точного отслеживания заданной траектории перемещения рабочего органа в пространстве и во времени при непрерывном контурном управлении для выполнения относительно сложных манипуляционных задач. Также учтены существенная нелинейность динамической и кинематической модели конструкции робота, динамическая взаимосвязь между отдельными системами и незапланированные изменения программы траектории или неожиданное изменение полезной нагрузки.
Значительную часть стоимости автономных робототехнических систем составляют диагностирующие устройства с системами поиска и ликвидации неисправностей, требующие наибольшего усложнения интеллектуальной и электромеханической частей. Соответственно, требование коммерческой эффективности производства бытовых агрегатов потребует отказаться от автономизации самообслуживания в угоду снижения себестоимости. Конкретно это выразится в отказе от использования эвристических методов для коррекции алгоритма управления, и предельного упрощения конструкций механизмов, ответственных за локомоционные и манипуляционные функции. Планирование управляющих воздействий по обнаруженным и идентифицированным отказам узлов робота необходимо оставить за специалистом-оператором сервисного обслуживания, а блок управления робота следует снабдить технически несложным и недорогим в производстве устройством накопления информации об истории работы системы.
Таким образом, ограничив применимость бытового робота требованием неизменности условий эксплуатации, мы добиваемся снижения степени интеллектуализированности управления до уровня существующих в настоящее время адаптивных систем управления.
При выполнении операции мойки автомобиля в индивидуальном гараже легко могут быть обеспечены необходимые уровни неизменности внешних условий и безопасности для людей. Роботу-автомойщику достаточно контролировать собственное состояние и распознавать кузов автомобиля по 3-м или 4-м признакам и хранящейся в памяти виртуальной модели. Способы механизации процедуры непосредственного мытья - превращения твердых загрязняющих покрытий на поверхности кузова автомобиля в жидкие и их сбора - в настоящее время вполне отработаны. Вновь решаемая задача – разработка стандартного алгоритма перемещения рабочего органа роботизированного агрегата-мойщика относительно поверхности кузова распознанного автомобиля в соответствии с сигналами датчиков состояния поверхности и с охранением ориентации рабочего органа относительно нормали к поверхности. Предварительный ввод указаний на тип автомобиля и режимы мойки целесообразно проводить в пункте продажи или сервисного обслуживания.
Таким образом, пользователь робота-автомойщика не будет заниматься обучением робота. Ему достаточно создать минимум условий для размещения и перемещения устройства в ограниченном пространстве гаража и подключить агрегат к источнику энергии.
Для позиционирования робота-автомойщика на потребительском рынке и оценки уровня технологичности изготовления и обслуживания можно воспользоваться ГОСТ 25686-85 [3] для промышленных роботов.
Согласно положениям ГОСТа, робот-автомойщик классифицируется следующим образом:
- по степени совершенства робот-автомойщик относится к роботам второго поколения с элементами адаптивности роботов третьего поколения;
- поскольку робот-автомойщик предназначен для выполнения определенного вида операций с определенной группой объектов, и конструктивно не зависит от обслуживаемых автомобилей, он может быть выполнен высокоспециализированным;
- по выполняемой функции робот-автомойщик относится к технологическим, а по грузоподъемности - к легким роботам;
- так как робот-автомойщик призван заменить человека на операции, выполняемой стоя, по объему рабочей зоны манипулятора его следует отнести к средним роботам;
- по характеру рабочей зоны робот-автомойщик относится к антропоморфным роботам.
- по типу привода робот-автомойщик может быть и электромеханическим, и гидравлическим, и пневматическим и роботом с комбинированным приводом;
- по типу управления робота-автомойщика следует отнести к роботам с контурным управлением, поскольку движение рабочего органа робота должно происходить по заданным траекториям с полным контролем всех степеней подвижности.
Отдельно следует рассмотреть кинематические и динамические характеристики манипулятора робота-автомойщика.
Для оценки его функциональности следует исходить из возможностей человеческой руки с ее 27 степенями подвижности. Учитывая, что человек может помыть кузов автомобиля в рукавицах, можно пренебречь подвижностью пальцев и учитывать "только" 12 степеней подвижности кисти. Но для манипулятора, очевидно, придется ограничиться обычными 6-7 степенями подвижности, поскольку более сложные манипуляторы чрезмерно сложны и дороги. Недостающие степени подвижности могут быть замещены превышением диапазонов смещения в узлах подвижности манипулятора.
Очевидный критерий выбора - способность обеспечить точность позиционирования рабочего органа при возможных резких изменениях нагрузки (из-за эффекта "присасывания" рабочего органа к поверхности кузова) при умеренной стоимости робота. Соответственно, привод манипулятора должен включать переразмеренные двигатели с большим стартовым моментом, обеспечивающим высокое быстродействие манипулятора. Гидравлические и пневматические приводы могут обеспечить необходимое быстродействие только при высоких давлениях в системе, что для бытового робота неприемлемо. Наиболее применимы, очевидно, электромеханические сервоприводы с шаговыми двигателями и зубчато-ременными трансмиссиями.
До вступления в фазу ажиотажного спроса на подобные изделия - вследствие возникновения моды на повседневно чистые автомобили – робот-автомойщик должен быть выполнен в стандарте "купил, включил, забыл". Иными словами, применение робота не должно предусматривать каких-либо предварительных или сопутствующих изменений конструкций гаража для раскрепления робота. Это условие накладывает ограничения на конструкцию робота.
Прежде всего, робот, - или его мобильный модуль, - должен быть кинетостатически уравновешенным, и создаваемые манипулятором рабочего органа статические и динамические моменты должны компенсироваться перераспределением реакций на опорах шасси. Использование противовесов для создания компенсирующих противомоментов сопряжено со значительным увеличением массогабаритных характеристик и усложнением конструкции, что делает этот способ неприемлемым. Таким образом, остойчивость робота может быть обеспечена только увеличением опорной базы его шасси.
Робот не должен создавать помехи движению автомобиля или водителя и, следовательно, траектории движения шасси робота могут располагаться только по бортам автомобиля.
Так как зона обслуживания робота-автомойщика практически совпадает с рабочей зоной и рабочим пространством, применение манипулятора с поступательными соединениями затруднено из-за их больших габаритов и необходимостью учета положения мертвых с выступающими элементами направляющих манипулятора. Эти зоны не должны пересекаться с объемом кузова автомобиля, что накладывает ограничения на доступность точек рабочей зоны рабочим органом. Ограниченность внутреннего пространства гаража обусловливает выбор антропоморфного манипулятора - вращательно-вращательно-вращательного (ВВВ), наиболее приспособленного к применению в стесненной зоне обслуживания. Именно такие манипуляторы применяются на операциях окраски и нанесения покрытий и, самое главное – они хорошо уравновешенны.
Совокупность указанных условий и обстоятельств диктует конфигурацию мобильного модуля робота в виде перекинутого поперек автомобиля самоходного моста или арки, осуществляющего глобальное перемещение рабочего органа, подвижно расположенной на арке каретки, осуществляющей региональное перемещение рабочего органа, и манипулятора с тремя степенями подвижности переносных перемещений рабочего органа, обладающего одной или двумя степенями ориентационных перемещений.
В такой системе рабочий орган обладает пятью, или шестью степенями подвижности. (рис. 1).

Рис. 1. Конфигурация мобильного модуля робота-автомойщика
В конечном счете, задача проектирования применимого робота-автомойщика приводит к следующей конфигурации робота - электромеханический агрегат, оборудованный пультом управления с установленными в нем системой ориентации, программой инициализации кузова автомобиля и программой управления глобальными, региональными и локальными движениями и представляющий собой устанавливаемый в индивидуальном гараже комплект из базового и мобильного модулей. Базовый модуль включает гидравлическую и пневматическую системы, фильтры, эвакуатор-отделитель загрязнений и упаковщик твердых отходов. Соединенный с базовым модулем линиями связи и шлангами для транспортировки моющей жидкости и грязе-капельно-воздушной смеси мобильный модуль содержит манипулятор с рабочим органом или органами и барабаны со шлангами, систему позиционирования модуля и рабочего органа относительно кузова автомобиля. Рабочим органом является сборка из форсунок для подачи струй распыленной моющей жидкости на поверхность корпуса автомобиля и сопла для всасывания использованной жидкости с загрязнениями. Мобильный модуль может быть выполнен в виде самоходной платформы -арки с расположенными по разные стороны автомобиля опорами, и соединяющей их перекладины с перемещающимся по ней манипулятором или манипуляторами с рабочими органами.
Для выбора метода планирования траектории движения рабочего органа робота следует исходить из того, что для мытья кузова автомобиля не требуется быстрого перевода рабочего органа из одного положения в другое, и не требуется высокой точности позиционирования.
Способность рабочего органа (рис. 2) собирать всю использованную жидкость с обрабатываемого участка поверхности автомобиля избавляет и от необходимости сохранения общей картины движения. Соответственно, управлению по вектору скорости следует предпочесть последовательную корректировку положения рабочего органа по точным координатам элементов поверхности виртуального образа кузова.
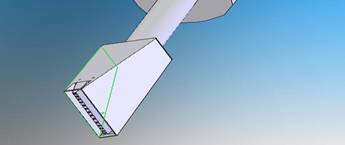
Рисунок 2. Общий вид рабочего органа робота-автомойщика
Наличие труднодоступных зон на кузовах автомобилей обусловливает высокие требования к абсолютному значению параметра, называемого углом сервиса и равного величине телесного угла θί, в пределах которого может находиться продольная ось рабочего органа, подводимого к данной точке ί рабочей зоны. Совершенство манипулятора характеризуется полным коэффициентом сервиса, вычисляемым по формуле (3):
ξ═ΣξίΔVί/V;
где ί=1··· n; ΔVί - элемент рабочего объема V; ξί - отношение угла сервиса к сферическому углу 4π.
Очевидно, что требуемая степень совершенства манипулятора определяется максимальным значением коэффициента сервиса, которое требуется для выполнения какой-то операции в рабочем объеме. Но для обработки только одной передней части автомобиля требуется манипулятор с полным коэффициентом сервиса, равным единице. То есть, механизм, обеспечивающий ориентационные перемещения, не может иметь вырожденных состояний.
Аналогично управлению промышленными роботами, основной задачей управления роботом-мойщиком является осуществление движения рабочего органа робота посредством генерирования внешних моментов в двух различных контрольных фазах - грубого движения, во время которой робот перемещается от изначальной позиции в окрестность места расположения заданной цели, и точного движения, когда рабочий орган робота динамически взаимодействует с объектом, используя при этом информационный канал обратной связи от внешних датчиков корректировки положения рабочего органа.
В [4] представлен результат синтеза алгоритмов управления подобного шарнирного манипулятора промышленного робота на основе диффеоморфного преобразования координат и нелинейной обратной связи по состоянию - диффеометрического регулятора (рис. 3). Вначале стабилизируется линейная и разомкнутая по выходу динамическая система. Затем для обеспечения устойчивости стабилизированной системы к неопределенностям в значениях параметров робота и задания добавляется контур оптимальной коррекции ошибок для каждой линейной подсистемы с разомкнутым выходом. В системе управления действиями робота-автомойщика таким контуром может служить система, сопоставляющая данные датчиков характера обрабатываемой поверхности со значениями соответствующих параметров из базы данных робота.
Контур линейной обратной связи F в системе может быть создан на основе датчиков расстояний до реальной поверхности кузова, сопоставляемых с желаемыми расстояниями до поверхности виртуального кузова. Поскольку F является постоянной блочно-диагональной матрицей, вся система останется линейной с разомкнутым выходом (типичный L&D – блок).
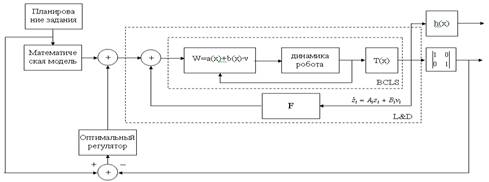
Рис. 3. Система управления манипуляционным роботом с диффеометрическим регулятором
Желаемый входной сигнал для каждой подсистемы получается из уравнений вида:
![]()
![]()
где ![]() - желаемая траектория;
- желаемая траектория;
где z - вектор состояния в преобразованной системе координат размерности (6x1);
![]() ,
,
![]() ,
,
Fi =[fi1 fi2],
![]() - собственная частота.
- собственная частота.
Приведенные в указанной работе экспериментальные результаты моделирования уравнений динамики робота минимальной конфигурации с синтезированными многомерным и диффеометрическим регуляторами свидетельствуют о существенном преимуществе алгоритмов управления, основанных на данном методе. Утверждается, в частности, что при значительном изменении нагрузки на рабочий орган ошибка отслеживания траектории для новейшего метода не превысила 0.1 мм, в то время как ошибка многомерного регулятора превысила 4 мм. При наличии в системе модельных ошибок (отклонение параметров модели объекта на 50%) многомерный регулятор теряет устойчивость, диффеометрический регулятор при моделировании в аналогичных условиях сохраняет устойчивость и точность позиционирования.
Исходя из того, что для осуществления заданной операции роботу-автомойщику достаточно точности порядка 1-2 мм, представляется целесообразным применить представленный в [4] метод для синтезирования системы управления в ходе разработки конструкции робота. Критический параметр применимости данного метода - 50%-й предел изменения нагрузки на манипулятор вследствие "присасывания" рабочего органа к поверхности кузова из-за эффекта Бернулли в зазоре между обрезом сопла и поверхностью. Это условие накладывает ограничения лишь на размер активного элемента рабочего органа и, следовательно, на его производительность.
В целом, нет принципиальных ограничений на выполнимость коммерчески эффективного бытового робота-автомойщика. Представляется целесообразным и своевременным проведение ОКР с целью создания промышленных образцов подобных изделий и предъявления их на инвестиционный рынок.
Литература
1. Белоусов уравнений динамики роботов-манипуляторов. / Препринт ИПМ им. РАН, № 45, 2002, 32 с.
2. , Нагоев спецификация робота–мойщика автомобиля для задачи эволюционного проектирования. В материалах второй международной конференции «Моделирование устойчивого регионального развития». Изд-во КБНЦ РАН, Нальчик, 2007, С. 234 -237.
3. Курс робототехники: Пер. с англ.- М.: Мир, 1990. - 527с.
4. http://www.masters.donntu.edu.ua/2007/kita/animitsa/diss/index.htm
