
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Молекулярно-динамическое моделирование задачи об изгибе упругой балки при различных условиях защемления на краях
УДК 539.31, 51.72
МОЛЕКУЛЯРНО-ДИНАМИЧЕСКОЕ МОДЕЛИРОВАНИЕ ЗАДАЧИ ОБ ИЗГИБЕ УПРУГОЙ БАЛКИ ПРИ РАЗЛИЧНЫХ УСЛОВИЯХ ЗАЩЕМЛЕНИЯ НА КРАЯХ
, ,
Институт информатики и проблем регионального управления КБНЦ РАН, Россия,
г. Нальчик
Классическая модель теории упругости основана на допущениях, которые сводятся к трем основным постулатам:
1. сплошная среда считается бесконечно делимой, т.е. не принимаются во внимание атомы или молекулы;
2. упругие свойства сплошной среды по всем направлениям одинаковы и описываются обобщенным законом Гука;
3. перемещение и деформации сплошной среды относительно невелики (не более 10%), что позволяет не различать системы координат до и после деформации.
В этих условиях были получены классические уравнения теории
упругости в перемещениях (уравнение Коши-Ляме), которые можно записать в виде:
 (1)
(1)
![]()
Здесь ![]() - упругие константы сплошной среды, характеризующие свойство материала сопротивляться сдвигу, всестороннему сжатию или растяжению соответственно,
- упругие константы сплошной среды, характеризующие свойство материала сопротивляться сдвигу, всестороннему сжатию или растяжению соответственно, ![]() - массовые силы, например, сила тяжести в направлениях
- массовые силы, например, сила тяжести в направлениях ![]()
Для решения системы уравнений в частных производных (1) необходимо задать, например, граничные условия смешанного типа:
![]() (2)
(2)
Здесь  - заданные граничные значения неизвестного перемещения
- заданные граничные значения неизвестного перемещения ![]() и напряжения
и напряжения ![]() на
на ![]() и
и ![]() (
(![]() - полная поверхность),
- полная поверхность), ![]() -единичный вектор, перпендикулярный к поверхности
-единичный вектор, перпендикулярный к поверхности ![]() .
.
Рассмотрим прогиб однородной упругой балки прямоугольного сечения, под действием силы тяжести. На рисунке 1 показана упругая балка, края которой защемлены (а) и свободно оперты (б).
(а) |
(б) |
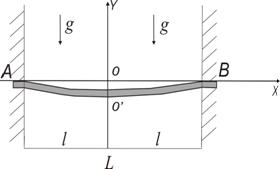
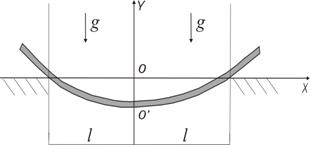
Рис 1. Схема прогиба балки с защемленными (а) и свободно опертыми краями (б).
Граничные условия в случае (а) запишутся в виде
![]() (3)
(3)
а в случае (б) соответственно
![]() (4) Можно показать, что решением системы уравнений (1), при граничных условиях (3), (4) являются соответственно функции [1]
(4) Можно показать, что решением системы уравнений (1), при граничных условиях (3), (4) являются соответственно функции [1]
![]() , (5)
, (5)
![]() . (6)
. (6)
Здесь ![]() - длина балки;
- длина балки; ![]() - вес единицы длины;
- вес единицы длины; ![]() - коэффициент, зависящий от модуля упругости
- коэффициент, зависящий от модуля упругости ![]() и момента инерции поперечного сечения балки.
и момента инерции поперечного сечения балки.
Исследование функций (5), (6) на экстремум показывают, что максимумы прогиба балки достигаются в ее середине и они равны
 ,
,  . (7)
. (7)
Другими словами, прогиб упругой балки под действием силы тяжести в случае свободного опирания превышает в 5 раз аналогичный прогиб в случае жесткого защемления. Приведенные формулы являются хорошо известными инженерам следствиями классических задач теории упругости и неоднократно были подтверждены экспериментальными исследованиями.
Рассмотрим принципиально другой подход к моделированию процессов деформирования упругой сплошной среды, отличный от приведенных выше основ классической теории упругости. Предположим, что среда состоит из макромолекул или частиц, взаимодействующих между собой по заданному закону, зависящему только от расстояния между ними. Среда считается, как и при классическом подходе, изотропной, но не бесконечно делимой. Перемещение и деформации, которые характеризуют относительное изменение расстояния между молекулами, могут быть произвольными, в том числе достаточно большими. Это значит, что предлагаемая модель может решать задачи, рассматриваемые в рамках так называемой геометрически нелинейной теории упругости [2],[3]. Кроме того, нет никакой необходимости считать, что среда является упругой, т.е. подчиняющейся определяющим законам Гука. Следовательно, в рамках предлагаемой модели можно решать физически нелинейные задачи [4], т.е. задачи, когда отклонение от закона Гука имеет место даже при небольших деформациях.
Уравнения движения системы взаимодействующих частиц записываются в виде [5]:
![]() (8)
(8)
Здесь ![]() - координаты перемещения
- координаты перемещения ![]() - ой макромолекулы в пространстве,
- ой макромолекулы в пространстве, ![]() - соответствующие скорости,
- соответствующие скорости, ![]() - время,
- время, ![]() - количество макромолекул на которые дискретизируется среда. Уравнения (8) являются записью второго закона Ньютона для
- количество макромолекул на которые дискретизируется среда. Уравнения (8) являются записью второго закона Ньютона для ![]() - ой макромолекулы, а их правая часть - векторная сумма сил, действующих на
- ой макромолекулы, а их правая часть - векторная сумма сил, действующих на ![]() - ю частицу.
- ю частицу.
Для решения системы уравнений (8) необходимо задать начальные условия вида
![]() (9)
(9)
Правая часть (8) содержит слагаемое, пропорциональное ![]() , которое учитывает процесс диссипации энергии или затухания колебания системы взаимодействующих частиц;
, которое учитывает процесс диссипации энергии или затухания колебания системы взаимодействующих частиц; ![]() - коэффициент затухания. Система уравнений (8) с начальными условиями (9) решается методом Рунге - Кутта [6] после предварительного сведения ее к системе
- коэффициент затухания. Система уравнений (8) с начальными условиями (9) решается методом Рунге - Кутта [6] после предварительного сведения ее к системе ![]() обыкновенных дифференциальных уравнений первого порядка. В молекулярно-динамической модели для описания деформации упругой балки использовалось 120 макромолекул. Это ограничение по количеству частиц было вызвано вычислительными возможностями использованной компьютерной техники.
обыкновенных дифференциальных уравнений первого порядка. В молекулярно-динамической модели для описания деформации упругой балки использовалось 120 макромолекул. Это ограничение по количеству частиц было вызвано вычислительными возможностями использованной компьютерной техники.
Таким образом, для каждого момента времени решалась система  обыкновенных дифференциальных уравнений первого порядка. Для уменьшения объема вычислений задавался радиус взаимодействия макромолекул, т.е. не учитывалось взаимодействие частиц вне этого радиуса.
обыкновенных дифференциальных уравнений первого порядка. Для уменьшения объема вычислений задавался радиус взаимодействия макромолекул, т.е. не учитывалось взаимодействие частиц вне этого радиуса.
В соответствии с новой моделью сплошной среды фактически решается более сложная динамическая задача, а статическая задача теории упругости получается как предельный переход по времени (когда завершается процесс затухания).
Проводилось имитационное моделирование процесса деформирования упругой балки путем пошагового решения системы (8) методом Рунге - Кутта. На рисунке 2 показаны стадии деформирования упругой балки, падающей на две опоры (на концах балки - свободное опирание).
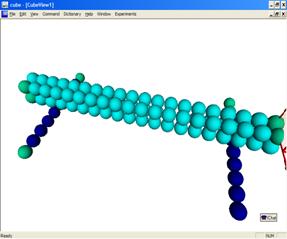
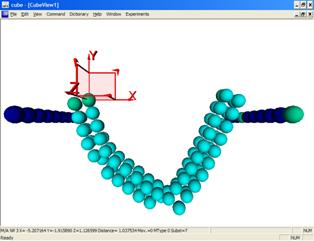
Рис. 2 Стадии деформирования упругой балки.
При достаточной скорости сброса балки, как видно из рисунка, имеет место ее разрушение.
Нами исследовалась задача о прогибе балки в условиях свободного и жесткого опирания (рис. 3).
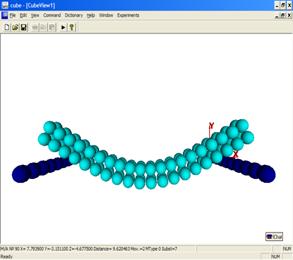
Рис. 3 Схема прогиба балки с защемленными и свободно опертыми краями в молекулярно-динамической модели.
Визуальный анализ максимального прогиба показал, что в случае жесткого защемления он существенно меньше (приблизительно в 4-5 раз), чем в случае свободного опирания. Указанная разница в прогибе в двух случаях по сравнению с классическим решением теории упругости, на наш взгляд, объясняется недостаточным количеством макроатомов, неточным моделированием условия защемления и свободного опирания, погрешностью, возникающей при решении больших систем дифференциальных уравнений и т.д.
Предлагаемое молекулярно - динамическое описание процесса деформирования свойств сплошной среды, представляется перспективным в виду возможности единого подхода к проблемам механики деформированного твердого тела - определению напряжения и деформации под действием заданных нагрузок с учетом любых физико-механических свойств среды и уровня нагружения.
ЛИТЕРАТУРА
, Лифшиц упругости. М.: Наука, 1965. Новожилов упругости. Л.: Судпромгиз, 1958. Green A.E., Zerna W. Theoretical elasticity. Oxford Clarendon Press, 1954. Ильюшин . М.: Гостехиздат, 1948. , , человекоподобный агент в виртуальной физически корректной среде.// Известия КБНЦ РАН. Нальчик, 2005. Самарский разностных схем. М.: Наука, 1977.
