

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Распознавание дефектов дорожного полотна по видео
для мониторинга дорог

Для поддержания информации о состоянии дорожного покрытия в актуальном состоянии необходимо регулярно выполнять мониторинг всех автомобильных дорог. Задача мониторинга состоит в выявлении дефектов дорожного покрытия (ямы, трещины, заплатки) и вычислении их характеристик (площадь, глубина), определении качества линий разметки. На основе полученной информации можно:
§ дать объективную оценку состояния дороги и спрогнозировать его изменения в будущем
§ оценить целесообразность ремонта и выбрать оптимальный для ремонта момент
§ рассчитать стоимость ремонтных работ
§ проверить соответствие параметров дороги после ремонта принятым нормативам.
Цель
Существующие методы мониторинга дорог по большей части основаны на визуальном контроле и дают субъективную оценку. Детальный мониторинг каждого дефекта представляет собой трудоемкую задачу и не может быть решен без специальных автоматизированных средств.
Для получения исходных данных можно использовать автомобиль, оснащенный фото- или видеокамерами, лазерными сканерами и системой позиционирования. Двигаясь вдоль намеченного пути, такой автомобиль получает привязанные к местности фотографии и облако трехмерных точек. Мониторинг дорог является одной из задач, решаемых с помощью мобильных картографических систем.

Наша цель – разработка программного обеспечения для мониторинга дорог, которое позволит эффективно обработать данные с мобильной картографирующей системы. Наша технология снизит стоимость и сроки проведения мониторинга.
Текущие наработки
К настоящему моменту нами разработаны следующие технологии:
§ Автоматизированный поиск дефектов и разметки дорожного полотна по видео. Сначала кадры видео проецируются на поверхность дороги для получения единого изображения дорожного покрытия с высоким разрешением.
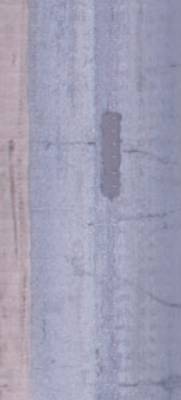
Пользователю последовательно показываются небольшие отрезки дороги. Для каждого участка выполняется разделение изображения на сегменты. Пользователь отмечает сегменты, соотвествующие разным классам дефектов или разметки. Система обучается, и дефекты на следующем отрезке находит автоматически. Пользователь может исправить ошибки автоматического алгоритма, что будет сразу учитываться при обработке следующей части изображений.


Такой подход позволяет адаптироваться к изменениям в погодных условиях, времени съемки и материале дорожного покрытия.
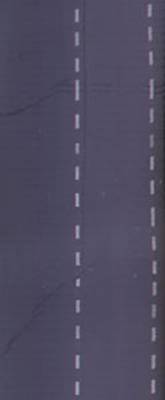


§ Поиск границ проезжей части. Пользователь отмечает границу на небольшом участке дороги. Система продолжает указанную границу, автоматически адаптируясь к изменениям в её положении. Пользователь может вносить точечные правки в найденную границу, и система в реальном времени подгоняет границу под указанные точки.






Нашим партнером в разработке технологии является российский производитель систем мобильного картографирования для дорожной области компания НПО «Регион».
