
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Пример определения передаточной функции динамического звена
по экспериментальной записи его переходной характеристики (кривой разгона)
на основе Метода Масштабирования (ММ).
Представленное ниже решение задачи было получено слушателями курсов целевого изучения метода масштабирования и приемов его практического применения. При выполнении работы использовалась специализированная программа «ММ-аппроксимация».
 |
В качестве исходных данных исполнителям была выдана запись кривой разгона объекта управления (ОУ), в виде двух файлов (рисунок 1). В первом файле «Time-t. dat» указаны значения времени точек кривой, во втором, «PV-x. dat», - значения выходной величины.
Действительная передаточная функция объекта, по которой были рассчитаны данные о кривой разгона при подаче на вход ступеньки величиной 10 %, выглядела следующим образом:
 (1)
(1)
Исполнителям задания передаточная функция (1) была неизвестна. Результат их работы будет тем успешнее, чем ближе он окажется к действительному варианту (1).
Первым действием требовалось ввести данные о кривой разгона рабочего объекта в программу «ММ-аппроксимация».
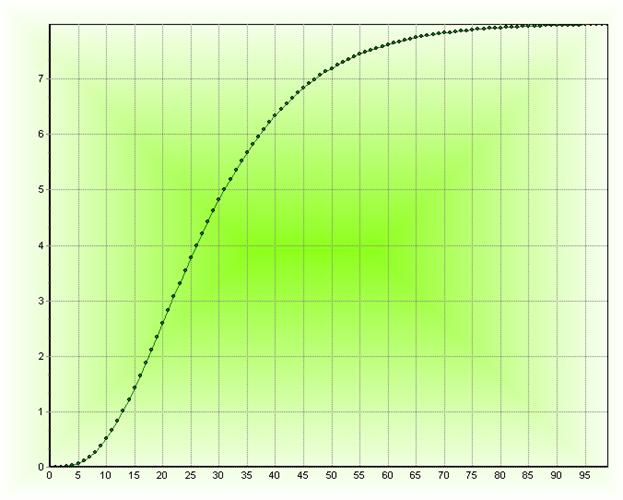
Программа предлагает два варианта ввода экспериментальных данных - ручной набор координат каждой точки, или ввод данных из сформированных файлов. Исполнители предпочли второй вариант, как более быстрый и надежный. Для этого им потребовалось набрать имена файлов «Time-t. dat» и, «PV-x. dat» в отведенных для этой цели строках. График кривой разгона рабочего объекта программа отобразила на мониторе (рисунок 2).
Рис. 2. Вид переходной характеристики (кривой разгона) рабочего ОУ при входной ступеньке 10 %.
Вторым действием нужно было из имеющейся в программе библиотеки выбрать эталонный объект управления, однотипный рабочему объекту. Однотипный, значит такого же порядка (n) и степени астатизма (r).
Степень астатизма рабочего ОУ очевидна - объект обладает самовыравниванием, значит его степень астатизма нулевая (r=0).
Оценить порядок рабочего объекта можно по начальному участку кривой разгона. Порядок характеризуется степенью параболы, наиболее точно вписывающейся в начальный участок. Определить степень такой параболы можно «по трем точкам». Еще проще воспользоваться специальной программой «VAPW».
Но исполнители задания предпочли свой вариант - прямой перебор эталонных объектов управления. Поочередно извлекая из библиотеки эталонные объекты разного порядка с самовыравниванием (r=0), они видели на экране две кривые разгона (рис. 3) и быстро выполняли масштабирование, оценивая достигаемую точность их совпадения.
 |
 |
Менее чем за пять минут были опробованы эталонные объекты 2; 3; 4; и 5-го порядков. Установлено, что лучше всего кривые разгона совмещаются в случае выбора эталонного ОУ четвертого порядка (рис. 4).
Значения масштабных коэффициентов Mx и Mt, при которых наблюдается наилучшее визуальное совпадение кривых разгона, программа отображает на экране:
Mx = 1,274; Mt = 1,212 (2)
Достигнутая степень совмещения кривых, безусловно, не идеальная, но, тем не менее, достаточно высокая. И это важно, поскольку именно степень совпадения характеризует точность будущего результата – передаточной функции рабочего ОУ.
Чтобы получить искомый результат, осталось щелкнуть мышкой по кнопке «Аппроксимация». Программа мгновенно выводит в правом нижнем углу экрана (рис. 4) все сведения о передаточной функции рабочего ОУ. Можно записать ее:
 (3)
(3)
Работа завершена.
И теперь можно сравнить результат (3) с действительной передаточной функцией (1).
Что касается степени астатизма и порядка ММ-модели (3), то здесь несомненное попадание «в десятку». Численные значения параметров в формулах (1) и (3) несколько отличаются. Этого следовало ожидать, так как совпадение кривых разгона не было идеальным. В то же время значения оказались весьма близкими. И это тоже вполне объяснимо. Ведь после процедуры масштабирования кривые разгона отличались незначительно. Таким образом, прямое сравнение моделей (1) и (3) позволяет признать результат, полученный с помощью ММ, вполне успешным.
Имеет право на существование несколько иная логика оценки достоверности (работоспособности) ММ-модели.
Технология ММ дает уверенность только в том, что расчет реакции ОУ на входную ступеньку по полученной ММ-модели будет иметь точность, соответствующую степени совпадения кривых разгона после процедуры масштабирования. В действительности мат. модель объекта обычно используется для других целей. Например, для определения параметров настройки регулятора, или для исследования характера и показателей переходных процессов в системе управления и т. п. Тогда правомерным становится вопрос, - пригодна ли ММ-модель для использования в этих целях? Или по-другому, способна ли визуальная оценка точности совпадения кривых разгона, выполняемая в ММ, обеспечивать работоспособность ММ-модели в различных вариантах использования?
Рассмотренный пример дает возможность в определенной степени ответить на поставленный вопрос. Знание действительной передаточной функции объекта (1) позволяет провести компьютерное моделирование двух замкнутых систем. В одной должна использоваться точная мат. модель объекта (1), в другой, - мат. модель (3), полученная методом масштабирования. Всё остальное в моделируемых системах должно быть одинаковым.
Качественная и количественная близость переходных процессов в моделируемых системах будет подтверждением работоспособности ММ-модели (3). Заметное различие процессов станет опровержением пригодности ММ-модели для практического использования.
Моделирование проводилось с помощью специализированной программы «PID-class». В обеих системах использовался ПИД-регулятор со следующими параметрами настройки:
Kp = 1,91; Ti = 19 c; Td = 6,6 c (4)
Моделировались переходные процессы системах при отработке внешнего возмущения (DH=20 %), приложенного ко входу ОУ, а также при одинаковом изменении задания регулятору. Полученные результаты представлены на рисунке 5.
Рис. 5. 1 - переходные процессы
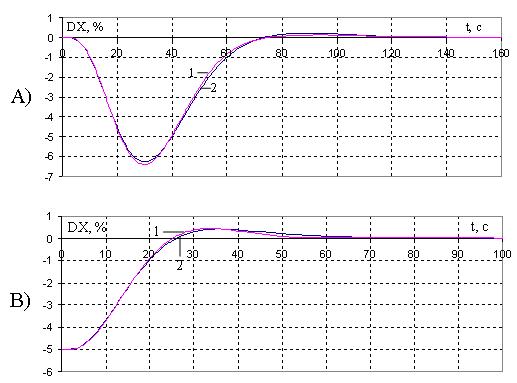 |
в замкнутой САР с действительным объектом (модель (1)).
2 - переходные процессы в замкнутой САР с ММ-моделью объекта (3).
А) – отработка системой внешнего возмущения DH=20 %.
В) – процессы в системе при увеличении задания регулятору на 5 %.
Предлагается согласиться с тем, что ММ-модель ОУ (3) пригодна для анализа и оптимизации работы замкнутой САР.
