

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Лабораторная работа № 4
« Инфракрасные построители местной вертикали»
А. Постановка навигационной задачи и пути ее решения.
Одной из основных задач управления космическим кораблем (КК), который движется вокруг планеты, является обеспечение ориентации его оси ![]() по направлению местной вертикали (МВ). Это необходимо для обеспечения мягкой посадки корабля, привязки базовой оси бортовой научно-исследовательской аппаратуры к координатам исследуемого участка поверхности планеты и решения других прикладных задач. Поэтому все КК оснащаются автоматическими устройствами, получившими название построителей местной вертикали (ПМВ).
по направлению местной вертикали (МВ). Это необходимо для обеспечения мягкой посадки корабля, привязки базовой оси бортовой научно-исследовательской аппаратуры к координатам исследуемого участка поверхности планеты и решения других прикладных задач. Поэтому все КК оснащаются автоматическими устройствами, получившими название построителей местной вертикали (ПМВ).
Наибольшее применение получили оптические ПМВ, работа которых основана на «визировании» видимого горизонта планеты как минимум в трех его различных точках. Автоматически работающие ПМВ используют наличие теплового контраста между поверхностью планеты и «холодным» космическим пространством, а поэтому они получили название инфракрасных ПМВ или ИК вертикалей (ИКВ). Возможны различные варианты реализации процесса просмотра ИК горизонта планеты. Чаще других он осуществляется путем кругового сканирования края горизонта планеты угловым полем ![]() построителя. При работе такой ИКВ ее оптическая ось за счет вращения зеркала 1 (см. рис.2.1) с некоторой угловой скоростью
построителя. При работе такой ИКВ ее оптическая ось за счет вращения зеркала 1 (см. рис.2.1) с некоторой угловой скоростью![]() описывает коническую поверхность, ось которой совпадает с осью
описывает коническую поверхность, ось которой совпадает с осью ![]() корабля. Тем самым обеспечивается круговой просмотр ИК горизонта планеты, а воспринимаемое прибором излучение будет содержать в себе информацию об отклонении ориентируемой оси корабля от направления МВ. Действительно, при правильной ориентации корабля оптическая ось построителя (за счет соответствующего наклона зеркала 1) будет перемещаться точно по краю ИК горизонта планеты угловым размером
корабля. Тем самым обеспечивается круговой просмотр ИК горизонта планеты, а воспринимаемое прибором излучение будет содержать в себе информацию об отклонении ориентируемой оси корабля от направления МВ. Действительно, при правильной ориентации корабля оптическая ось построителя (за счет соответствующего наклона зеркала 1) будет перемещаться точно по краю ИК горизонта планеты угловым размером ![]() , зависящим от высоты
, зависящим от высоты ![]() полета корабля и толщи
полета корабля и толщи ![]() излучающего слоя атмосферы (траектория «а»). Поэтому прибор будет воспринимать постоянный во времени лучистый поток, а сигнал на его выходе будет равен нулю. В случае же отклонения оси
излучающего слоя атмосферы (траектория «а»). Поэтому прибор будет воспринимать постоянный во времени лучистый поток, а сигнал на его выходе будет равен нулю. В случае же отклонения оси ![]() от МВ на некоторый угол рассогласования
от МВ на некоторый угол рассогласования ![]() центр траектории движения оптической оси построителя сместится относительно центра диска планеты (траектория «б»), что приведет к модуляции воспринимаемого прибором лучистого потока, а, следовательно, и появлению управляющего сигнала, пропорционального углу
центр траектории движения оптической оси построителя сместится относительно центра диска планеты (траектория «б»), что приведет к модуляции воспринимаемого прибором лучистого потока, а, следовательно, и появлению управляющего сигнала, пропорционального углу ![]() . По команде этого сигнала система управления будет так разворачивать корабль в общем случае вокруг осей
. По команде этого сигнала система управления будет так разворачивать корабль в общем случае вокруг осей ![]() и
и ![]() , чтобы
, чтобы ![]() , обеспечивая ориентацию его оси
, обеспечивая ориентацию его оси ![]() по МВ. Очевидно, что погрешность ориентации КК по МВ подобной ИКВ случайным образом складывается из погрешности ее установки на корабле и порога угловой чувствительности датчика, а также будет зависеть от динамики процесса разворота корабля и вариаций излучения ИК горизонта планеты.
по МВ. Очевидно, что погрешность ориентации КК по МВ подобной ИКВ случайным образом складывается из погрешности ее установки на корабле и порога угловой чувствительности датчика, а также будет зависеть от динамики процесса разворота корабля и вариаций излучения ИК горизонта планеты.
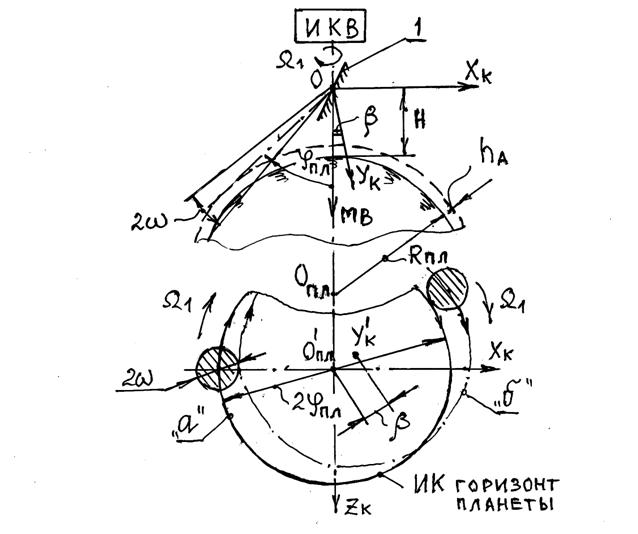
Рис. 2.1 Принцип действия ИКВ с круговым сканированием.
Б. Техническое описание ИК ПМВ 32К.
Принцип кругового сканирования был реализован в нескольких модификациях ИК ПМВ, функциональная схема одной из которых (ИКВ типа 32К) представлена на рис. 2.2. Модулированное (при ![]() ) по амплитуде и начальной фазе за счет вращения сканирующего зеркала (СЗ) излучение от ИК горизонта планеты собирается оптической системой (ОС) построителя в плоскости чувствительного слоя болометра (Б). Сигнал с выхода последнего, усиленный избирательным усилителем, через электронный ключ ( ЭК ) поступает на вход фазочувствительного детектора (ФЧД). С его помощью в процессе сравнения начальной фазы сигнала рассогласования с фазами двух опорных напряжений, вырабатываемых генератором этих напряжений (ГОН), производится разложение сигнала на две составляющие, которые после их выделения электрическими фильтрами (ЭФ) поступают в систему управления для разворота корабля вокруг его осей
) по амплитуде и начальной фазе за счет вращения сканирующего зеркала (СЗ) излучение от ИК горизонта планеты собирается оптической системой (ОС) построителя в плоскости чувствительного слоя болометра (Б). Сигнал с выхода последнего, усиленный избирательным усилителем, через электронный ключ ( ЭК ) поступает на вход фазочувствительного детектора (ФЧД). С его помощью в процессе сравнения начальной фазы сигнала рассогласования с фазами двух опорных напряжений, вырабатываемых генератором этих напряжений (ГОН), производится разложение сигнала на две составляющие, которые после их выделения электрическими фильтрами (ЭФ) поступают в систему управления для разворота корабля вокруг его осей ![]() и
и ![]() до устранения угла рассогласования. Для подавления мешающего сигнала, возникающего при попадании Солнца в угловое поле прибора, предусмотрен специальный электронный блок – блок подавления Солнца (БПС), датчиком которого является фоторезистор (ф/р). По команде сигнала от БПС построитель отключается от системы управления до тех пор, пока Солнце не выйдет за пределы углового поля прибора.
до устранения угла рассогласования. Для подавления мешающего сигнала, возникающего при попадании Солнца в угловое поле прибора, предусмотрен специальный электронный блок – блок подавления Солнца (БПС), датчиком которого является фоторезистор (ф/р). По команде сигнала от БПС построитель отключается от системы управления до тех пор, пока Солнце не выйдет за пределы углового поля прибора.
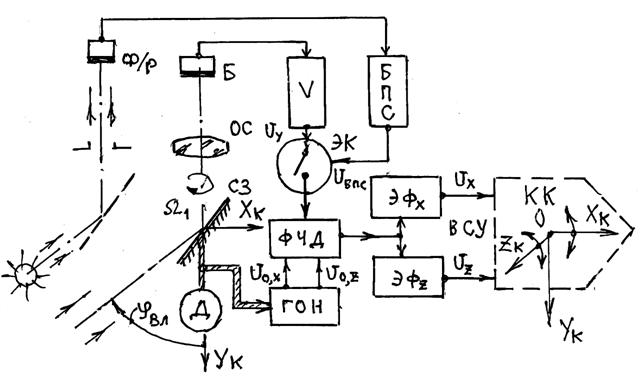
Рис. 2.2 Функциональная схема ИКВ "32К"
Оптическая схема ИКВ 32К представлена на рис.2.3, где 1- герметизирующий полость прибора германиевый колпак в виде восьмигранной призмы, 2- сканирующее зеркало, 3- внеосевое параболическое зеркало-объектив, 4 – фоторезистор БПС, 5- оптический фильтр из просветленного сурьмянистого индия и 6- болометр. Она имеет следующие основные параметры: диаметр зрачка входа – 20 мм, фокусное расстояние объектива -19 мм, угловое поле -3 градуса, интегральное пропускание в рабочем спектральном диапазоне 8-14 мкм – 0.32 и угол наклона сканирующего зеркала (оно может принимать два фиксированных положения) обеспечивает соответствие ![]() в требуемом диапазоне изменения высоты полета корабля.
в требуемом диапазоне изменения высоты полета корабля.

Рис. 2.3 Оптическая схема ИКВ "32К"
Основным недостатком ИК ПМВ с круговым сканированием является необходимость специальной подстройки угла наклона сканирующего зеркала при изменении высоты полета корабля, так как при ![]() (см. рис. 2.1) в угловой характеристике датчика
(см. рис. 2.1) в угловой характеристике датчика  появляется «мертвая» зона, приводящая к значительным погрешностям ориентации корабля по МВ. Поэтому во всех модификациях ИКВ подобная подстройка обязательно предусматривается.
появляется «мертвая» зона, приводящая к значительным погрешностям ориентации корабля по МВ. Поэтому во всех модификациях ИКВ подобная подстройка обязательно предусматривается.
На рис.2.4 представлена функциональная схема построителя 76К, в котором при изменении высоты полета корабля система из восьми зеркал 1 синхронно меняет угол своего наклона относительно оси ![]() с помощью электропривода по команде программного устройства. Назначение прочих элементов схемы понятно из рисунка (аналогично рис. 2.2), а позиция 8 означает встроенный имитатор излучения ИК горизонта планеты.
с помощью электропривода по команде программного устройства. Назначение прочих элементов схемы понятно из рисунка (аналогично рис. 2.2), а позиция 8 означает встроенный имитатор излучения ИК горизонта планеты.

Рис. 2.4 Функциональная схема ИКВ "76К"
В. Практическая работа с ИК ПМВ 76К.
Практическая работа с построителем в составе испытательного стенда сводится к проверке функционирования прибора с помощью системы его внутреннего контроля и измерению статической угловой характеристики. Стенд включает в себя (см. рис.2.5) кроме собственно построии его электронного блока -2 еще измерительный блок – 3 , имитатор - 4 излучения ИК горизонта планеты с пультом -5 для управления работой последнего.
Так как планета имеет большие угловые размеры ( -
-![]() ), то имитатор ее излучения построен по специальной схеме, представленной на рис. 2.6. На схеме: 1- кольцевой излучатель, воспроизводящий тепловой контраст системы «ИК горизонт планеты – космическое пространство»; 2 – тороидальный зеркальный объектив с сечением «а-а» в виде внеосевой параболы, оптическая ось
), то имитатор ее излучения построен по специальной схеме, представленной на рис. 2.6. На схеме: 1- кольцевой излучатель, воспроизводящий тепловой контраст системы «ИК горизонт планеты – космическое пространство»; 2 – тороидальный зеркальный объектив с сечением «а-а» в виде внеосевой параболы, оптическая ось ![]() которой составляет угол
которой составляет угол ![]() с осью
с осью ![]() прибора и в фокальной кольцевой «плоскости» которой располагается излучатель; 3 – устройство для ввода и отсчета углов рассогласования
прибора и в фокальной кольцевой «плоскости» которой располагается излучатель; 3 – устройство для ввода и отсчета углов рассогласования ![]() и 4- испытуемый ИК построитель. Такой малогабаритный переносной имитатор воспроизводит простейшую «прямоугольную» модель излучения системы «земля-атмосфера-космос». В условиях же производства используются более сложные и габаритные имитаторы, которые воспроизводят уже «трапециидальную» модель системы «З-А-К», близкую к реальному характеру излучения этой системы.
и 4- испытуемый ИК построитель. Такой малогабаритный переносной имитатор воспроизводит простейшую «прямоугольную» модель излучения системы «земля-атмосфера-космос». В условиях же производства используются более сложные и габаритные имитаторы, которые воспроизводят уже «трапециидальную» модель системы «З-А-К», близкую к реальному характеру излучения этой системы.
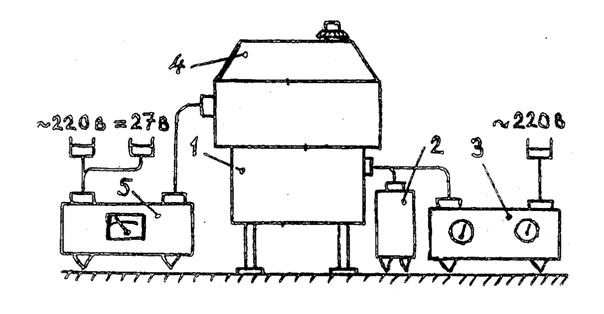
Рис. 2.5 Функциональная схема лабораторного стенда.
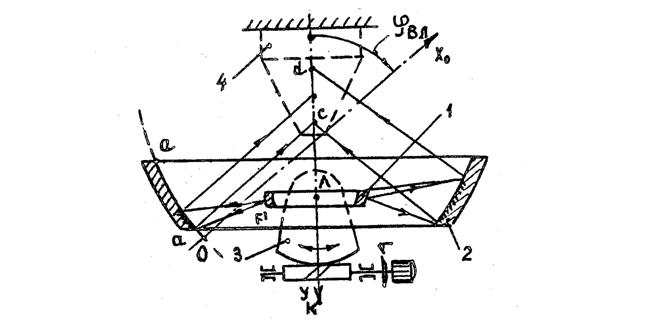
Рис. 2.6 Оптическая схема имитатора системы "З-А-К".
По результатам измерений строится линейный участок угловой характеристики построителя ![]() , которая затем сравнивается с теоретическим ее видом, полученным с помощью учебной программы по имени « ИК вертикаль».
, которая затем сравнивается с теоретическим ее видом, полученным с помощью учебной программы по имени « ИК вертикаль».
Г. Контрольные вопросы.
1. Как «строится» МВ с помощью оптических ПМВ ИК диапазона и чем определяется конечная погрешность ориентации корабля по МВ?
2. Перечислите и укажите назначение всех функциональных блоков ИКВ с круговым сканированием горизонта планеты.
3. Что предусмотрено для обеспечения защиты ИКВ от мешающего оптического излучения и как работает это устройство?
4. В каком спектральном диапазоне работают ИКВ и чем он формируется?
5. Какие параметры ИКВ можно определить на основе анализа ее угловой характеристики и как изменится ее вид, если конструкция прибора не будет обеспечивать выполнение условия ![]() ?
?
6. Каким требованиям должен отвечать имитатор излучения системы «З-А-К» и как они выполняются в его реальной конструкции ![]()
7. Предложите зависимость для расчета времени отключенного состояния ИКВ 32К (76К) от системы управления кораблем по команде их БПС, а также длительности электрического импульса, формируемого этим блоком при попадании Солнца в его угловое поле.
8. Чем формируется угловое поле БПС и как оно должно соотноситься с угловым полем ИКВ?
Литература и учебные пособия
1. Ивандиков приборы наведения и ориентации космических аппаратов. М.: Машиностроение, 1979.
2. , Илюхин и оптико-электронные приборы угловой ориентации космических кораблей, Ч.1 и Ч.2. М.: Изд. МГТУ, 2000.
3. , Илюхин практикум по курсу «Проектирование ОЭП навигации». М.: Изд. МГТУ, 1992.
