
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 ; (1)
; (1)
![]() ; (2)
; (2)
 . (3)
. (3)
Здесь принимается:
![]() .
.
Решаем систему уравнений (1), (2) и (3) относительно тока ![]() , полу-чим:
, полу-чим:
 . (4)
. (4)
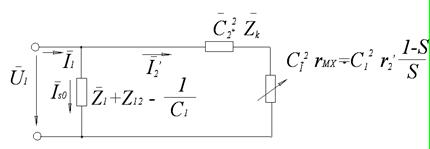
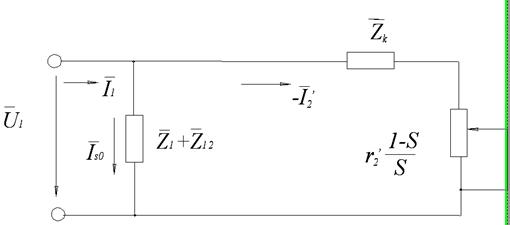
Выражению в квадратных скобках соответствует электрическая схема1.
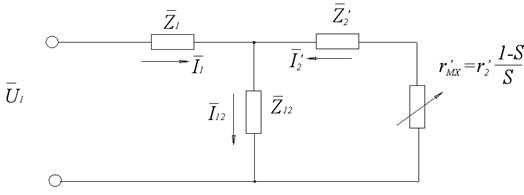
Сопротивление ![]() есть сопротивление намагничи-вающей ветви схемы замещения. Индуктивная составляющая этого сопротивления
есть сопротивление намагничи-вающей ветви схемы замещения. Индуктивная составляющая этого сопротивления ![]() обусловлена главным магнитным потоком и является индуктивным сопротивлением взаимной индукции. Посредством сопротивления
обусловлена главным магнитным потоком и является индуктивным сопротивлением взаимной индукции. Посредством сопротивления ![]() учитываются магнитные потери в сердечнике статора:
учитываются магнитные потери в сердечнике статора:
![]()
 . (5)
. (5)
Сопротивление ![]() зависит от подведённого напряжения
зависит от подведённого напряжения ![]() . С повышением
. С повышением ![]() сопротивление
сопротивление ![]() уменьшается. Уравнение (1) для цепи статора соответствует левой части схемы замещения, а уравнение (2) для цепи ротора – правой части этой схемы. Для узловых точек справедливо уравнение (3). Параметры схемы замещения в относительных единицах для АД мощностью от нескольких кВт и выше лежат в следующих пределах:
уменьшается. Уравнение (1) для цепи статора соответствует левой части схемы замещения, а уравнение (2) для цепи ротора – правой части этой схемы. Для узловых точек справедливо уравнение (3). Параметры схемы замещения в относительных единицах для АД мощностью от нескольких кВт и выше лежат в следующих пределах:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
С повышением мощности машины индуктивные сопротивления увеличиваются, а активные уменьшаются.
При расчёте характеристик АД по схеме замещения её параметры должны быть известны. Задаются скольжением s и определяют сопротивление:
![]() .
.
Затем находят токи ![]() и
и ![]() , а по ним, используя формулы, приведённые выше, определяют мощности, электромагнитный момент, потери и так далее.
, а по ним, используя формулы, приведённые выше, определяют мощности, электромагнитный момент, потери и так далее.
Приведённая схема замещения является Т – образной. Она полностью отражает физические процессы, происходящие в машине, но имеет узловую точку между сопротивлениями  . Узловая точка усложняет расчёт токов при различных значениях сколжения.
. Узловая точка усложняет расчёт токов при различных значениях сколжения.
Большое практическое применение имеет Г – образная схема замещения, в которой ветвь намагничивания подключена непосредственно на напряжение ![]() .
.
Из Т – образной схемы замещения следует:
 . (6)
. (6)
Подставив (6) в (3), получим:
![]()
 ,
,
откуда
 , (7)
, (7)
где  - комплексный коэффициент ;
- комплексный коэффициент ;
 - ток синхронизма, то есть ток, потре-бляемый АД при синхронной скорости вращения ротора S=0.
- ток синхронизма, то есть ток, потре-бляемый АД при синхронной скорости вращения ротора S=0.
Выразим ток ![]() через параметры Т – образной схемы замещения:
через параметры Т – образной схемы замещения:
 . (8)
. (8)
Определив из Т – образной схемы замещения ток ![]() и подставив его в (8), будем иметь:
и подставив его в (8), будем иметь:
 . (9)
. (9)
С учётом (9) перепишем уравнения (7) в виде:
 , (10)
, (10)
где  .
.
Данному уравнению (10) соответствует Г – образная схема замещения следующего вида:
При такой схеме токи ![]() определяются независимо друг от друга делением напряжения
определяются независимо друг от друга делением напряжения ![]() на сопротивление соответствующей ветви. При
на сопротивление соответствующей ветви. При ![]() = const ток
= const ток ![]() является постоянной величиной и не зависит от скольжения.
является постоянной величиной и не зависит от скольжения.
Комплексный коэффициент ![]() :
:
 , (11)
, (11)
имеет определённый физический смысл. Умножив числитель и знаменатель на ток синхронизма ![]() , получим:
, получим:
 , (12)
, (12)
где ![]() обратная ЭДС, индуцируемая в обмотке статора при S=0.
обратная ЭДС, индуцируемая в обмотке статора при S=0.
Для машин мощностью от нескольких кВт и выше модуль коэф-фициента ![]() равен:
равен:
![]() ,
,
а аргумент ![]() . Поэтому обычно принимают
. Поэтому обычно принимают ![]() , а комплексный коэффициент
, а комплексный коэффициент ![]() заменяют модулем
заменяют модулем ![]() . Для практических расчётов машин средней и большой мощности можно принять
. Для практических расчётов машин средней и большой мощности можно принять  . Погрешность в расчётах при этом не превышает
. Погрешность в расчётах при этом не превышает  , схема замещения будет иметь вид.
, схема замещения будет иметь вид.
Комплексный коэффициент ![]() учитывается при анализе работы АД малой мощности.
учитывается при анализе работы АД малой мощности.
56 Электромагнитный момент АД.
Напряжение для электромагнитного момента может быть получено через электромагнитные силы и через электромагнитную мощность.
В первом случае для АД с фазным ротором:
 ; (1)
; (1)
![]() ;
;
 ,
,
где ![]() обмоточный коэффициент обмотки ротора ;
обмоточный коэффициент обмотки ротора ;
![]() количество проводников обмотки ротора ;
количество проводников обмотки ротора ;
![]() число пар полюсов обмотки ротора ;
число пар полюсов обмотки ротора ;
![]() действующее значение магнитной индукции в зазоре между статором и ротором ;
действующее значение магнитной индукции в зазоре между статором и ротором ;
![]() полюсное деление ;
полюсное деление ;
![]() диаметр ротора ;
диаметр ротора ;
![]() активная длина проводников.
активная длина проводников.
Обмоточный коэффициент обмотки ротора равен:
![]() ;
;
 ;
;
 ,
,
где ![]() коэффициент укорочения первой гармоники ;
коэффициент укорочения первой гармоники ;
![]() коэффициент распределения обмотки ротора ;
коэффициент распределения обмотки ротора ;
![]() угол укорочения обмотки ;
угол укорочения обмотки ;

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
