

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ РФ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ТЮМЕНСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЕГАЗОВЫЙ УНИВЕРСИТЕТ»
ИНСТИТУТ ТРАНСПОРТА
Кафедра Детали машин
КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ РАСЧЕТЫ РЫЧАЖНОГО ШЕСТИЗВЕННИКА
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к расчетно-графической работе по Теории механизмов и машин для студентов специальностей НР-130503, ПСТ-130501, НБ-130504, МОП-130602, АТХ-190601, СТЭ-190603, ПДМ-190205, СП-150202, ПТИ-260703, ТМ-151001, МКC-151002, МХП-240801, МСО-190207
очной полной и сокращенной форм обучения
Тюмень 2007
Утверждено редакционно-издательским советом
Тюменского государственного нефтегазового университета
Составители: доцент, к. т.н.
ассистент,
© государственное образовательное учреждение высшего профессионального образования
«Тюменский государственный нефтегазовый университет»
2007 г
Введение
Методические указания «Кинематический и силовой расчеты рычажного шестизвенника» используются при выполнении расчетно-графической работы по теории механизмов и машин. В них рассмотрены следующие вопросы: структурный анализ механизма, определение скоростей и ускорений отдельных точек и звеньев механизма, силовой расчет, построение рычага Жуковского схемы, формулы, алгоритмы решения задач.
Методические указания предназначены для студентов технических специальностей очной полной и сокращенной формы обучения.
Задание на расчетно-графическую работу
1. Число оборотов кривошипа ![]() об/мин. Угловая скорость кривошипа
об/мин. Угловая скорость кривошипа ![]() является постоянной.
является постоянной.
2. Размеры звеньев:
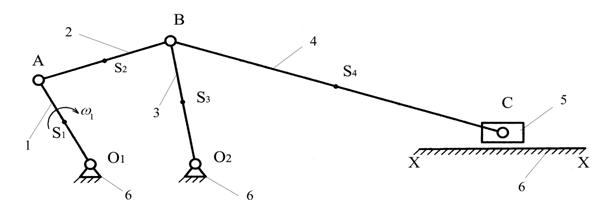
О1А=0,15 м, АВ=0,2 м, ВС=0,5 м, ВО2=0,185 м.
Центры масс звеньев расположены по середине соответствующих звеньев.
3. Массы звеньев: m1=1,5 кг, m2=2 кг, m3 = 2 кг, m4=5 кг, m5 = 5 кг.
4. Момент инерции относительно оси, проходящей через центр масс звена:  ,
,  ,
,  .
.
5. Рабочие усилие: F=40 Н.
1. Структурный анализ механизма
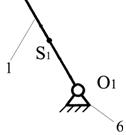
1.1. Структурная схема механизма.
1.2. Звенья механизма.
Звено
ззвзвеназвена
| Наименование
| Подвижность
| Число подвижных звеньев
|
1 | Кривошип | Подвижное | n=5 |
2 | Шатун | Подвижное | |
3 | Коромысло | Подвижное | |
4 | Шатун | Подвижное | |
5 | Ползун | Подвижное | |
6 | Стойка | Неподвижное |
1.3. Кинематические пары.
№ п/п | Обозначение на структурной схеме | Соединяемые звенья |
Вид
| Тип кинематической пары
| Индекс | |
Характер соприкосновения | Степень подвижности | |||||
1 | О1 | 1,6 | Вращат. | Низшая | Одноподвижная |
|
2 | А | 1,2 | Вращат. | Низшая | Одноподвижная | ВA(1,2) |
3 | В | 2,3 | Вращат. | Низшая | Одноподвижная | ВB(2,3) |
4 | В | 3,4 | Вращат. | Низшая | Одноподвижная | ВВ(3,4) |
5 | С | 4,5 | Вращат. | Низшая | Одноподвижная | ВC(4,5) |
6 | С | 5,6 | Поступат. | Низшая | Одноподвижная | ПС(5,6) |
7 | О2 | 3,6 | Вращат. | Низшая | Одноподвижная |
|
Число одноподвижных кинематических пар p1=7, число двух подвижных кинематических пар р2=0.
1.4. Степень подвижности механизма.
![]()
1.5. Строение групп Ассура.
1.5.1. Последняя группа Ассура.
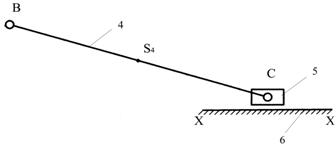
II класс, 2 порядок, вид ВВП.
Степень подвижности:  .
.
Структурная формула:  .
.![]()
1.5.2. Предпоследняя группа Асcура.
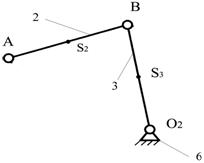
II класс, 2 порядок, вид ВВВ
Степень подвижности .
Структурная формула:  .
.
1.5.3. Начальный механизм.
I класс
Степень подвижности ![]() .
.
Структурная формула:  .
.
1.6. Структурная формула всего механизма.
![]()
![]() .
.
1.7. Класс всего механизма II, так как наивысший класс группы Ассура, входящей в данный механизм II.
2. Кинематический анализ механизма
2.1. Определение скоростей точек звеньев и угловых скоростей звеньев.
Построим кинематическую схему механизма в масштабе  .
.
2.1.1. Определение угловой скорости кривошипа:
![]() .
.
2.1.2. Определение скорости точки А:
![]() .
.
Вектор скорости ![]() перпендикулярен кривошипу О1А.
перпендикулярен кривошипу О1А.
Выбираем масштаб плана скоростей  .
.
Найдём отрезок, изображающий вектор скорости ![]() на плане:
на плане:
 .
.
Из полюса плана скоростей pV откладываем данный отрезок перпендикулярно О1А в направлении угловой скорости ![]() .
.
2.1.3. Определение скорости точки В:
Запишем векторное уравнение:
![]() .
.
Направления векторов скоростей: ![]() ,
, ![]() .
.
Продолжим строить план скоростей.
Из конца вектора ![]() (точка а) проводим направление вектора
(точка а) проводим направление вектора ![]() . Из полюса (точка pV) проводим направление вектора
. Из полюса (точка pV) проводим направление вектора ![]() . На пересечении двух проведённых направлений получим точку b. Измеряя длины полученных отрезков и умножая их на масштаб
. На пересечении двух проведённых направлений получим точку b. Измеряя длины полученных отрезков и умножая их на масштаб ![]() , получим значения скоростей:
, получим значения скоростей:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 |
