


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Лекция 1. Основные понятия. Энергосистема как объект управления.
Классификация устройств автоматики ЭЭС
Электроэнергетическая система (ЭЭС) представляет собой совокупность параллельно работающих электростанций, электрических сетей и приёмников электроэнергии, объединённых общим режимом с единым централизованным оперативно-диспетчерским управлением.
Несколько параллельно-работающих ЭЭС при централизованном оперативно-диспетчерском управлении ими представляют объединённую электроэнергетическую систему (ОЭЭС).
Параллельно работающие ОЭЭС при централизованном оперативно-диспетчерском управлении ими образуют Единую электроэнергетическую систему (ЕЭЭС) страны.
Работа ЭЭС, обеспечивающих электроснабжение потребителей электроэнергией требуемого качества, характеризуется специфическими особенностями:
v непрерывностью процесса производства и потребления электроэнергии, определяемой необходимостью обеспе6чить в каждый момент времени выработку электростанциями мощности, равной мощности, потребляемой нагрузкой;
v режимной взаимозависимостью параллельно работающих электростанций и линий электропередачи, т. е. изменением нагрузки электростанций и перетоков мощности между ними при изменении мощности или отключении одной из электростанций;
v быстротой протекания переходных процессов, распространяющихся за доли секунды на огромные расстояния.
В состав ЭЭС входят три подсистемы:
¨ генерации, включающая электростанции разных типов, производящие электрическую и тепловую энергию;
¨ передачи и распределения электроэнергии, включающая ЛЭП и подстанции электрической сети;
¨ потребления, состоящая из разнообразных потребителей электрической энергии.
Рассмотрим преимущества ЕЭЭС перед отдельными электростанциями и небольшими энергосистемами. ЕЭЭС распространяется на большой территории, которая охватывает несколько (до 6) часовых поясов. Отсюда вытекает широтный эффект объединения – снижение пика нагрузки всей энергосистемы за счёт разновременности пиков в отдельных её частях. В конце 80-х гг. снижение пика достигало 10000 МВт.
Другим существенным преимуществом является повышение надёжности энергоснабжения потребителей за счёт взаиморезервирования её частей и повышение экономичности за счёт максимального использования наиболее экономичных источников электроэнергии. Однако, отсюда вытекают и недостатки. Главный из них заключается в возможности быстрого распространения нарушений нормального режима, произошедших в той или иной части энергосистемы, и перерастания их в так называемые системные аварии с обесточением потребителей на больших территориях.
Наилучшим средством предотвращения таких аварий является совершенствование управления энергосистемой, которое обычно подразделяется на два класса: оперативно-диспетчерское и автоматическое. К оперативно-диспетчерскому управлению относится управление, осуществляемое силами специально выделенного (дежурного) персонала, непрерывно контролирующего режим работы энергосистемы в целях обеспечения его экономичности и необходимого качества электроэнергии по частоте и напряжению, а также предотвращения возможных аварий и ликвидации их последствий. Аварийные процессы, а также процессы нормального рабочего режима в энергосистемах настолько быстротечны, что оперативно-диспетчерское управление с участием человека-оператора оказывается неспособным вовремя отреагировать, и тем более справиться с возникающими при этом задачами, и поэтому должно дополняться управлением другого вида – автоматическим, т. е. с привлечением автоматических устройств.
Первоначально автоматические устройства применялись в энергетике главным образом для выполнения функций защиты электроэнергетических объектов от действия сверхтоков, возникающих в момент повреждения. Процессы, возникающие при этом, – это электромагнитные переходные процессы, а автоматические устройства, предназначенные для защиты от влияния этих процессов, – это устройства релейной защиты. Параллельно с развитием релейной защиты энергосистем в них начала развиваться и другая ветвь автоматики с иными задачами, для выполнения которых также требуется высокая скорость реакции, недоступная человеку (например, задачи автоматического повторного включения (АПВ) ЛЭП, задачи автоматического ввода резерва (АВР); иногда это называют линейной или сетевой автоматикой).
В настоящее время число этих задач настолько велико, что это привело к появлению отдельной самостоятельной дисциплины – системной автоматики. Релейная защита и системная автоматика – это два вида автоматического управления в энергосистемах, взаимосвязанных и взаимодополняющих друг друга. Но между ними имеются и отличия. Первое из них состоит в том, что для системной автоматики, как правило, определяющими являются в большей степени электромеханические переходные процессы, т. е. процессы, связанные с относительным движением роторов синхронных машин во время аварии и после неё. Сюда же добавляются процессы так называемой длительной динамики, происходящие со значительным (в несколько герц) изменением абсолютного движения (частоты вращения) синхронных генераторов.
Второе отличие системной автоматики состоит в следующем. Действие УРЗ носит достаточно локальный характер, ограниченный одним или несколькими присоединениями, и лишь затяжка в отключении КЗ или возникновение каскадных возмущений может привести к дальнейшему развитию аварии. Системной автоматике присущ чаще всего глобальный характер действия и влияния на энергосистему с охватом большого числа присоединений и достаточно большого района энергосистемы. Причём действие этой автоматики тесно связано с режимом работы энергосистемы или её части и оказывает своё влияние на этот режим.
Все автоматические устройства управления, применяемые в электроэнергетических системах, можно разделить на две группы: первая – автоматические устройства управления нормальными режимами и вторая – автоматические устройства управления аварийными режимами (устройства противоаварийной автоматики (ПА)). К автоматическим устройствам управления аварийными режимами также относятся и устройства релейной защиты.
Автоматика нормального режима – это обычно (за некоторыми исключениями) достаточно медленная автоматика, предназначенная, в основном, для помощи оперативному персоналу. Её влияние на процессы при авариях в энергосистеме ограничено и сказывается главным образом на послеаварийном режиме. К автоматике нормального режима относятся следующие автоматические устройства:
v пуска и останова агрегатов электростанций (технологическая автоматика);
v включения на параллельную работу (синхронизации) генераторов;
v регулирования частоты и активной мощности (АРЧМ), обеспечивающие поддержание на заданном уровне частоты в ЕЭЭС, оптимальное распределение активных нагрузок между электростанциями и генераторами, регулирование и ограничение перетоков активной мощности по линиям электропередачи;
v регулирования напряжений и перетоков реактивной мощности: автоматические регуляторы возбуждения (АРВ) синхронных машин (генераторов, синхронных компенсаторов и электродвигателей), автоматические регуляторы коэффициентов трансформации трансформаторов, автоматические регуляторы статических источников реактивной мощности;
v управления трансформаторами на подстанциях для включения и отключения одного из параллельно работающих трансформаторов с целью минимизации потерь электроэнергии в них, разгрузки перегруженного трансформатора путём снижения напряжения и отключения нагрузки.
Таким образом, основными назначениями автоматических устройств управления нормальными режимами являются автоматизация сложного технологического процесса пуска и включения в работу синхронных генераторов, обеспечение требуемого качества электроэнергии; повышение экономичности работы ЭЭС, предотвращение и устранение опасной перегрузки генераторов, трансформаторов и ЛЭП, чреватой возможностью возникновения и развития аварийного нарушения режима.
Вторая группа автоматических устройств – ПА. ПА должна обладать большим быстродействием при интенсивном воздействии на процессы при авариях в энергосистемах и послеаварийном режиме, приближаясь в этом смысле к релейной защите. Для ПА характерна тесная связь с режимом работ энергосистем, вследствие чего её часто называют противоаварийной режимной автоматикой. ПА осуществляет следующие функции:
1) фиксирует факт и место возникновения аварийного нарушения нормального режима и обеспечивает отделение повреждённого участка от неповреждённой части ЭЭС;
2) предотвращают распространение аварийного нарушения нормального режима на соседние неповреждённые участки энергосистемы;
3) восстанавливают нормальный режим работы.
Первую функцию выполняют устройства противоаварийного автоматического управления, фиксирующие возникновение в электроэнергетической системе КЗ и отключение повреждённого участка. К ним относятся УРЗ и УРОВ.
Вторую функцию выполняют автоматические устройства противоаварийного управления – устройства ПА, к которым относятся следующие устройства:
v автоматики предотвращения нарушения устойчивости параллельной работы (АПНУ) путём разгрузки перегруженных ЛЭП, что достигается воздействием на снижение генерирующей мощности электростанций в избыточной по мощности части ЭЭС (вплоть до деления ЭЭС) и на отключение нагрузки в дефицитной по мощности приёмной её части;
v форсировки возбуждения (ФВ) синхронных генераторов;
v автоматики ликвидации асинхронного режима (АЛАР), который может возникнуть вследствие отказа АПНУ или недостаточности осуществляемой ею разгрузки ЛЭП;
v автоматической частотной разгрузки (АЧР), отключающей при значительном снижении частоты в отделившемся от ЭЭС дефицитном по мощности районе менее ответственной нагрузки;
v автоматики, осуществляющей при аварийном снижении частоты выделение генераторов на питание собственных нужд ТЭС или АЭС и выделение электростанций или генераторов со сбалансированной нагрузкой, благодаря чему предотвращается опасность нарушения работы собственных нужд и снижения мощности, вырабатываемой соответствующими электростанциями;
v автоматики ограничения снижения напряжения (АОСН). Снижение напряжения возникает в районах с дефицитом реактивной мощности. Действует на отключение ответственных потребителей, шунтирующих реакторов и. т.д. с целью предотвращения лавины напряжения и повышения напряжения.
v автоматики, ограничивающей опасное для электрооборудования повышение напряжения (АОПН) в сети сверхвысокого напряжения, обусловленное избытком реактивной мощности, путём включения реакторов, отключения линии СВН (односторонне отключенную линию).
v автоматики ограничения опасного для турбоагрегатов ТЭС и электродвигателей потребителей повышение частоты (АОПЧ) в выделившемся с большим избытком мощности ГЭС районе. АОПЧ реагирует на повышенный уровень частоты и действует на отключение части гидрогенераторов, а второй ступенью действует на отделение ТЭС от ГЭС со сбалансированной нагрузкой.
v АОСЧ – автоматика ограничения снижения частоты. Имеет свои каналы управления и осуществляет быстрый ввод резерва на ГЭС, переводит генераторы из режима СК в активный режим, разделяет энергосистему со сбалансированной нагрузкой.
Третью функцию по восстановлению нормального режима выполняют следующие устройства:
v автоматического повторного включения (АПВ) линий, трансформаторов, шин подстанций и электростанций, отключенных действием соответствующих УРЗ;
v автоматического включения резерва (АВР), восстанавливающие электроснабжение потребителей, потерявших питание в результате отключения рабочего источника питания;
v автоматического пуска резервных гидроагрегатов и ГТУ при аварийном снижении частоты, осуществляющие включение их в сеть и загрузку;
v автоматической загрузки работающих генераторов ТЭС, действующие при снижении частоты или при срабатывании устройств АПНУ и уменьшающие дефицит активной мощности.
САОН – специальная автоматика отключения нагрузки

Рисунок 1
САОН – специальная автоматика отключения нагрузки
Основные понятия теории автоматического регулирования (или управления)
Устройства автоматического управления (регулирования)
В некоторых учебниках может встретиться следующее разграничение терминов «автоматическое управление» и «автоматическое регулирование». Под автоматическим управлением понимается выполнение устройством автоматики действий по заданной программе при возникновении внешних возмущающих воздействий. Внешними возмущающими воздействиями являются изменение схем или параметров режима объекта управления, а также команды персонала на пуск устройства автоматики и др. Под автоматическим регулированием понимается непрерывный процесс поддержания какой-либо регулируемой величины на неизменном уровне или процесс изменения этой величины по заранее заданному закону при любых возмущающих воздействиях. Устройства, выполняющие указанную функцию, называются автоматическими регуляторами. В итоге, системы автоматического регулирования содержат те же элементы, что и системы автоматического управления. Устройства автоматического регулирования (управления) перестают действовать после выполнения программы или после исчезновения возмущающего воздействия.
Регулируемой величиной называется физический параметр, который следует поддерживать неизменным или менять по определенному закону. Такими параметрами в энергосистемах являются напряжение, частота, активная и реактивная мощности.
В зависимости от принципа регулирования все регуляторы можно разделить на два класса: регуляторы, использующие принцип регулирования по возмущению, и регуляторы, использующие принцип регулирования по отклонению регулируемой величины от заданного значения. Имеются комбинированные системы регулирования, использующие оба принципа.
Устройства автоматического регулирования (управления) по возмущению независимо от назначения характеризуются одинаковым принципом построения. Структурная схема устройства управления показана на рисунке 2. Основными элементами устройства управления являются измерительный (пусковой) орган, программное устройство, усилитель-преобразователь, исполнительный орган.
Рисунок 2
При возникновении возмущающего воздействия измерительный (пусковой) орган определяет значение этого воздействия и при достижении возмущающим воздействием значения, равного уставке измерительного (пускового) органа, осуществляет пуск устройства. При этом устройство начинает действовать по заданной программе, которая характеризуется назначением устройства, видом возмущающего и управляющего воздействий. Принцип регулирования по возмущению состоит в том, что измерительный орган регулятора реагирует на изменение одного или нескольких возмущающих воздействий, оказывающих наиболее существенное влияние на регулируемую величину. При возникновении такого возмущения измерительный орган через остальные элементы регулятора оказывает воздействие на объект регулирования таким образом, чтобы регулируемая величина имела заданное значение, причем регулирующее воздействие тем больше, чем больше возмущающее воздействие.
Программное устройство вырабатывает сигнал управляющего воздействия, при этом уровень сигнала зависит от интенсивности возмущающего воздействия. Однако в ряде случаев мощность этого сигнала недостаточна для изменения режима работы объекта управления. Поэтому устройство управления содержит усилитель сигнала программного устройства. Одновременно усилитель преобразует сигнал таким образом, чтобы он был удобен для воздействия на объект. Исполнительный орган осуществляет воздействие на объект управления.
Примером устройства автоматического управления, действующего по факту возмущения, является устройство автоматической частотной разгрузки (АЧР). Измерительным (пусковым) органом этого устройства, фиксирующим глубокое снижение частоты в энергосистеме, является реле частоты. В качестве усилительного и исполнительного органа используются промежуточные реле, действующие на отключение линейных, трансформаторных, секционных и других выключателей, через которые осуществляется питание нагрузки.
Также примером регулятора по возмущению является устройство компаундирования синхронных генераторов, которое осуществляет регулирование возбуждения генератора в зависимости от тока статора.
Устройство управления, действующее по факту изменения положения внешнего устройства или по команде персонала, имеет аналогичную структуру. Примером такого устройства управления может служить устройство автоматического включения синхронных генераторов.
Системы автоматического управления в большинстве случаев являются системами разомкнутого типа: все элементы системы действуют в одном направлении, обратное воздействие элементов друг на друга отсутствует.
Принцип регулирования по отклонению регулируемой величины от заданного значения состоит в том, что измерительный орган регулятора сравнивает действительное значение регулируемой величины у с заданным значением у0 (рис. 3).


Рисунок 3
При наличии рассогласования измерительный орган вырабатывает сигнал регулирующего воздействия, который стремится восстановить регулируемую величину. При этом знак регулирующего воздействия должен быть противоположен знаку отклонения регулируемой величины у. Величина и знак отклонения определяют интенсивность и направление процесса регулирования.
Для обеспечения непрерывности регулирования необходимо, чтобы на вход измерительного органа непрерывно подавался сигнал, пропорциональный регулируемой величине, т. е. должна существовать связь выхода системы регулирования с ее входом. Эта связь получила название главной (или основной) обратной связи. Наличие главной обратной связи является характерной особенностью регуляторов, работающих на принципе выявления отклонения регулируемой величины, Таким образом, по своей структуре системы регулирования по отклонению являются автоматическими системами замкнутого типа.
Кроме главной обратной связи регуляторы содержат дополнительные (внутренние) обратные связи, дополнительные обратные связи связывают выход какого-либо звена регулятора с его входом или входом любого предыдущего звена. Эти связи корректируют значение регулирующего воздействия и тем самым изменяют характер регулирования. Существуют положительные (ПОС) и отрицательные (ООС) обратные связи.
Положительная обратная связь характеризуется тем, что сигнал этой связи совпадает по знаку с основным сигналом, поступающим на вход звена, охваченного этой связью. Действие положительной обратной связи приводит к увеличению коэффициента усиления основного звена. Это свойство ПОС используется в усилителях для получения больших значений коэффициентов усиления. Кроме того, ПОС используется для придания процессу регулирования требуемого характера.
Отрицательная обратная связь создает дополнительное регулирующее воздействие противоположное по знаку основному регулирующему воздействию. Отрицательная обратная связь способствует стабилизации процесса регулирования, уменьшает величину перерегулирования (см. рисунок 5, рис. 1.4, а) при необходимости может полностью исключить перерегулирование (см. рисунок 5, рис. 1.4, 6). Орган ООС также позволяет придавать процессу регулирования требуемый характер.
Характеристики регулирования
К регуляторам предъявляются определенные требования, относящиеся к качеству процесса регулирования. Показателями качества процесса регулирования являются точность регулирования в установившемся режиме, быстродействие системы регулирования, характер переходного процесса (колебательный или апериодический), величина перерегулирования и др. Качество процесса регулирования может быть оценено по характеристикам регулирования. Различают статические и динамические характеристики.
Статической характеристикой системы автоматического регулирования называется зависимость регулируемой величины от одного из возмущающих воздействий.
Статическая характеристика определяет, насколько точно регулятор поддерживает регулируемую величину или изменяет её по определенному закону при возникновении возмущающих воздействий.
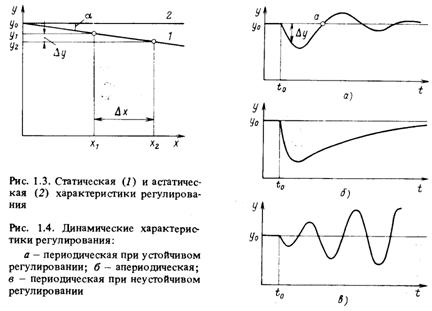
Рисунок 5
Примеры статических характеристик показаны на рисунке 5 (рис. 1.3). В общем случае установившееся значение регулируемой величины у2 после действия регулятора отличается от исходного значения у1. Степень изменения регулируемой величины принято характеризовать коэффициентом статизма kс, который определяет наклон характеристики:
![]() (1.1)
(1.1)
Принято считать коэффициент статизма положительным, если регулируемая величина уменьшается при возрастании величины возмущающего воздействия (характеристика 1 на рисунке 5, рис. 1.3).
Обычно коэффициент статизма выражается в относительных единицах:
 (1.2)
(1.2)
При ![]() получим
получим ![]() . (1.3)
. (1.3)
Таким образом, коэффициент статизма в относительных единицах равен относительному изменению регулируемой величины при изменении возмущающего воздействия от нуля до номинального значения. Обычно коэффициент статизма регуляторов невелик и составляет 2—6%.
Характеристика с коэффициентом статизма, равным нулю, получила название астатической (характеристика 2 на рисунке 5, рис. 1.3). Регуляторы, обладающие астатической характеристикой, обеспечивают постоянство регулируемой величины независимо от возмущающего воздействия. Однако эта характеристика не позволяет распределить в заданном соотношении величину регулирующего воздействия между параллельно работающими объектами. Для этой цели удобно использовать регуляторы со статическими характеристиками.
Динамической характеристикой системы автоматического регулирования называется зависимость изменения регулируемой величины от времени в процессе регулирования при внезапном возникновении возмущающего воздействия. Характер переходного процесса зависит от характеристик элементов, входящих в систему регулирования, от коэффициентов усиления этих элементов, наличия обратных связей и их характеристик.
Различают несколько видов динамических характеристик. На рисунке 5 (рис. 1.4а) показана характеристика с периодическим изменением регулируемой величины. В момент времени t0 возникает возмущение, которое вызывает уменьшение регулируемой величины. При появлении отклонения ![]() вступает в действие регулятор, который стремится восстановить регулируемую величину. В точке а регулируемая величина достигает исходного значения, однако из-за инерции элементов регулятора и объекта процесс её увеличения будет продолжаться. Появится отклонение регулируемой величины другого знака, и регулятор начнёт действовать на уменьшение регулируемой величины. Процесс регулирования будет иметь колебательный характер. При устойчивом регулировании система после нескольких колебаний установится на определенном значении регулируемой величины. Как видно из характеристики, в переходном процессе имеется перерегулирование, которое в некоторых случаях может оказаться недопустимым. Выбрав соответствующий орган отрицательной обратной связи, можно получить характеристику с апериодическим изменением регулируемой величины (рисунок 5, рис. 1.4б). Она характеризуется монотонным изменением регулируемой величины.
вступает в действие регулятор, который стремится восстановить регулируемую величину. В точке а регулируемая величина достигает исходного значения, однако из-за инерции элементов регулятора и объекта процесс её увеличения будет продолжаться. Появится отклонение регулируемой величины другого знака, и регулятор начнёт действовать на уменьшение регулируемой величины. Процесс регулирования будет иметь колебательный характер. При устойчивом регулировании система после нескольких колебаний установится на определенном значении регулируемой величины. Как видно из характеристики, в переходном процессе имеется перерегулирование, которое в некоторых случаях может оказаться недопустимым. Выбрав соответствующий орган отрицательной обратной связи, можно получить характеристику с апериодическим изменением регулируемой величины (рисунок 5, рис. 1.4б). Она характеризуется монотонным изменением регулируемой величины.
Одним из показателей качества регулирования является быстродействие системы регулирования. Быстродействие определяется временем переходного процесса, отсчитываемым от начала возмущения до момента, когда отклонение регулируемой величины от установившегося значения не превышает некоторой достаточно малой величины. Быстродействие системы регулирования, настроенной на периодическую характеристику, несмотря на колебательность переходного процесса обычно выше быстродействия апериодически настроенной системы регулирования.
При неправильно настроенных элементах регулятора система регулирования может оказаться неустойчивой, когда любое незначительное возмущение приводит к незатухающему колебательному процессу (рисунок 5, рис. 1.4в).
