Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
МИНИСТЕРСТВО ПУТЕЙ СООБЩЕНИЯ
РОССИЙСКОЙ ФЕДЕРАЦИИ
РОСТОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ПУТЕЙ СООБЩЕНИЯ
, , .
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ ПЛОСКОГО ТЕЛА
ЗАДАЧА С 1
Методические указания к выполнению расчетно-графических работ
теоретической механики.
РАЗДЕЛ СТАТИКА.
Ростов-на-Дону
- 2000 -
УДК 534.014
Определение реакции связей плоского тела. Методические указания к выполнению расчетно-графических работ раздела статика теоретической механики. / , , . Ростовский государственный университет путей сообщения. Ростов-на-Дону, 2000, 18с.
Определение реакций связей плоского тела. Задача С1
Методические указания к выполнению расчетно-графических работ теоретической механики.
Раздел статика.
Ответственный за выпуск
Адрес университета: 344038, г. Ростов н/Д, пл. им. Ростовского Стрелкового полка народного ополчения, 2
Ростовский государственный университет путей сообщения. Ростов-на-Дону, 2000.
Содержание
Краткая теория. Основные понятия.
Пример решения задачи.
Таблица исходных данных
Приложение
КРАТКАЯ ТЕОРИЯ. ОСНОВНЫЕ ПОНЯТИЯ.
Сила (вектор силы).
*Характеристики вектора силы:
а) Модуль (величина). Размерность Н (ньютон).
б) Линия действия - прямая, вдоль которой направлен вектор силы.
в) Точка приложения.
*Аналитическое представление вектора силы.
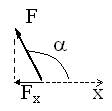
Всякому вектору ставится в соответствие три скалярных величины, называемых его проекциями на оси.
Проекция силы на ось равна произведению модуля силы на косинус угла между вектором силы и положительным направлением оси.
Fx = F cos a. Размерность Fx - Н (ньютон).
*Алгебраический момент силы относительно точки. Размерность Нм (ньютон - метр).
Величина алгебраического момента силы относительно точки равна произведению модуля силы на плечо, взятому со знаком плюс или минус.
Плечом силы относительно точки называется кратчайшее расстояние от этой точки до линии действия силы (длина перпендикуляра, опущенного из точки на линию действия силы).
Правило знаков: если сила стремится вращать тело вокруг моментной точки против часовой стрелки, то алгебраический момент положителен, в противном случае - отрицателен.
Алгебраический момент силы относительно точки равен нулю, если линия действия силы проходит через эту точку.
*Момент силы относительно оси. Размерность - Нм.
Моментом силы относительно оси называется алгебраический момент проекции этой силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с этой плоскостью.
Правило знаков: знак момента силы относительно оси положителен, если со стороны положительного направления оси видно, что сила стремится повернуть тело против часовой стрелки. В противном случае знак момента отрицателен.
Момент силы относительно оси равен нулю в случае: а) линия действия силы параллельна оси; б) линия действия силы пересекает ось.
Пара сил.
Две равные по величине, противоположно направленные силы, линии действия которых параллельны, называются парой сил.
Алгебраический момент пары сил равен произведению модуля одной из сил пары на плечо пары сил, взятому со знаком плюс или минус. Размерность - Нм( ньютон - метр).
Плечом пары сил называется кратчайшее расстояние между линиями действия сил пары.
Правило знаков: алгебраический момент пары сил имеет знак плюс, если пара сил стремится вращать тело против часовой стрелки, в противном случае знак момента пары сил - минус.
Сумма моментов сил пары относительно любой точки, лежащей в плоскости действия пары сил, равна алгебраическому моменту пары сил и, следовательно, не зависит от взаимного расположения моментной точки и пары сил.
Распределенная нагрузка.
Воздействие распределенной нагрузки на тело характеризуется интенсивностью и длиной пролета, на котором она приложена. Размерность интенсивности - Н/м (ньютон деленный на метр).
Равномерно распределенную нагрузку можно заменить ее равнодействующей, равной произведению интенсивности на длину пролета, и приложенной в середине участка действия распределенной нагрузки.
Виды связей и их реакции.
Тела, ограничивающие свободу перемещения данного тела, называются связями.
Силы, с которыми связи действуют на рассматриваемое тело, называются реакциями связей.
Аксиома освобождаемости от связей:
не изменяя механического воздействия на тело, можно отбросить наложенные на него связи, заменив их реакциями этих связей.
Среди огромного разнообразия реальных связей можно выделить лишь небольшое количество их видов, обладающих общими особенностями и имеющими наиболее широкое распространение.
Основные виды связей и их реакции приведены в таблице.
Тип связи и ее реакция | Рисунок |
Гладкая поверхность. Реакция гладкой поверхности направлена по нормали к поверхности связи или тела (в случае ребристой поверхности связи) и приложена в точке соприкосновения тел. |
|
Гибкая связь. Реакция гибкой связи направлена по касательной к линии самой связи в точке ее прикрепления. |
|
Стержневая (упругая) связь. Реакция стержневой связи направлена вдоль линии, проходящей через шарниры стержня. |
|
Шарнирные связи. Реакция подвижного шарнира 1 направлена перпендикулярно направляющей плоскости шарнира. Реакция цилиндрического шарнира 2 (неподвижного) лежит в плоскости, перпендикулярной оси шарнира и обычно представляется двумя взаимно перпендикулярными составляющими. Реакция сферического шарнира 3 (неподвижного) представляется тремя взаимно перпендикулярными составляющими. |
|
Жесткая заделка. (плоская) Реакция жесткой заделки обычно представляется двумя взаимно перпендикулярными составляющими и реактивным моментом. |
|
Момент силы относительно точки.
Сила F приложена в точке А. Положение точки А относительно точки О определяется длинами взаимно перпендикулярных отрезков АВ и ВО. Линия действия силы задаётся значением угла a. Вычислим момент силы F, приложенной в точке А, относительно точки О различными способами:
*Использование определения.
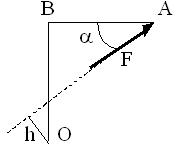 Величина алгебраического момента силы относительно точки равна произведению модуля силы на плечо:
Величина алгебраического момента силы относительно точки равна произведению модуля силы на плечо:
MO (F) = - F h,
где h = (OB - AB tg a) cos a = ОВ cos a - АВ sin a.
В результате получаем, что
MO (F) = F(- ОВ cos a + АВ sin a).
*Использование теоремы Вариньона.
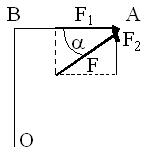
Момент равнодействующей равен сумме моментов её составляющих:
MO (F) = MO (F1) + MO (F2).
Разложим силу F на составляющие F1 и F2 , плечи которых известны: ОВ и АВ. Определим величины составляющих:
F1 = F cos a, F2 = F sin a.
В результате получаем:
MO (F) = MO (F1) + MO (F2) =-F1 OB + F2 AB = F(- ОВ cos a + АВ sin a).
*Аналитическое вычисление момента силы относительно точки.
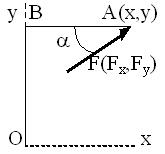 Если известны проекции силы F(Fx, Fy) и координаты её точки приложения A(x, y), то её момент относительно начала системы координат определяется выражением:
Если известны проекции силы F(Fx, Fy) и координаты её точки приложения A(x, y), то её момент относительно начала системы координат определяется выражением:
MO (F) = x Fy - y Fx.
Введем систему координат с центром в точке О. Определим проекции силы на оси введенной системы координат: Fx = F cos a, Fy = F sin a. Определим координаты точки приложения силы: x = AB, y = OB.
В результате получаем, что MO (F) = F(- ОВ cos a + АВ sin a).
Система сил, ее основные характеристики. Основная теорема статики и ее следствие.
Системой сил называется совокупность сил, приложенных к объекту исследования.
Две системы сил называются эквивалентными, если они оказывают на тело одинаковое механическое воздействие.
Равнодействующей данной системы сил называется сила, эквивалентная этой системе сил.
Система сил называется уравновешенной, если она не оказывает на тело механического воздействия.
Главным вектором системы сил называется вектор, равный геометрической сумме всех сил данной системы.
Главным моментом системы сил называется вектор, равный геометрической сумме моментов всех сил данной системы.

Основная теорема статики: Любую систему сил, действующих на тело, можно привести к заданному центру и заменить одной силой, равной главному вектору этой системы, и одной парой сил с моментом, равным главному моменту этой системы относительно центра приведения.
Следствие 1: У эквивалентных систем сил главный вектор и главный момент соответственно равны между собой.
Следствие 2: Если главные вектор и момент системы сил равны нулю, то эта система сил уравновешена.
Системы сил и условия их равновесия.
Системой сходящихся сил (ССС) называется такая система сил, линии действия которых пересекаются в одной точке.
Основное свойство ССС: эта система сил всегда имеет равнодействующую, так как её главный момент относительно точки, в которой пересекаются линии действия всех сил системы, равен нулю.
Системой пар сил (СПС) называется такая система сил, которая состоит из одних пар сил.
Основное свойство СПС: эта система сил никогда не имеет равнодействующей, так как её главный вектор всегда равен нулю.
Системой коллинеарных сил (СКС) называется такая система сил, линии действия которых параллельны между собой.
Основное свойство СКС: главный вектор и главный момент этой системы сил всегда взаимно перпендикулярны.
Произвольной системой сил (СС) называется такая система сил, линии действия которых расположены в пространстве произвольным образом.
Основным отличием этой системы сил является то, что она единственная, которая приводится к динамическому винту.
Если линии действия сил перечисленных систем расположены в одной плоскости, то такие системы сил называются плоскими.
Основные свойства плоских систем сил такие же, за исключением того, что главный вектор и главный момент плоской произвольной системы сил всегда взаимно перпендикулярны, то есть, эта система сил не приводится к динамическому винту.
Аналитические условия равновесия перечисленных систем сил приводятся в таблице:
Плоская ССС | Плоская СПС | Плоская СКС | Плоская СС |
SFKX = 0 SFKY = 0 | SMK = 0 | SFKX = 0 SMA(FK) = 0 | SFKX = 0 SFKY = 0 SMA(FK) = 0 |
Пространствен. ССС | Пространствен. СПС | Пространствен. СКС | Пространствен. СС |
SFKX = 0 SFKY = 0 SFKZ = 0 | SMKX = 0 SMKY = 0 SMKZ = 0 | SFKZ = 0 SMX(FK) = 0 SMY(FK) = 0 | SFKX = 0 SFKY = 0 SFKZ = 0 SMX(FK) = 0 SMY(FK) = 0 SMZ(FK) = 0 |
Проверка условий равновесия.
Если найденная система сил находится в равновесии, то выполняются соответствующие условия равновесия (смотри таблицу)
При проверке обычно составляется дополнительное условие равновесия. Например, для плоской произвольной системы сил – это сумма моментов всех сил данной системы относительно некоторой точки. При этом моментная точка выбирается так, чтобы через неё не проходили линии действия найденных сил. В этом случае величины этих сил входят в проверочное уравнение и могут быть проверены.
ПРИМЕР РЕШЕНИЯ ЗАДАЧИ.
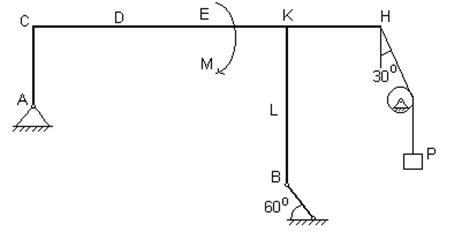
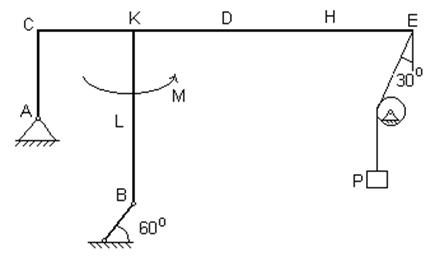
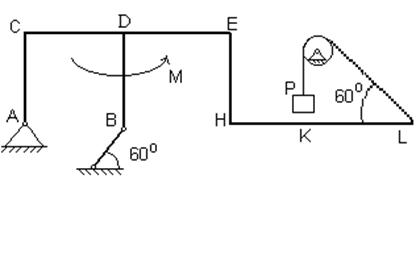
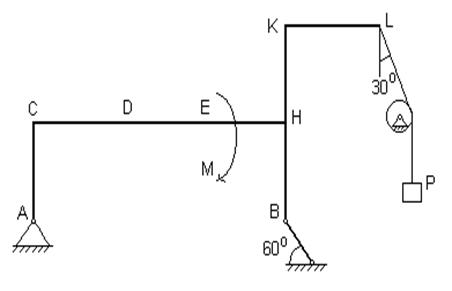
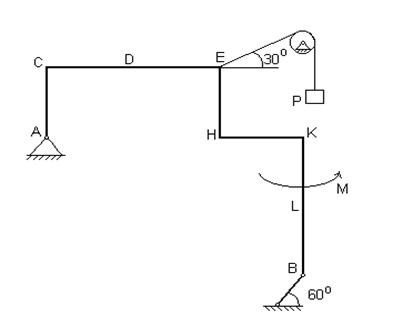
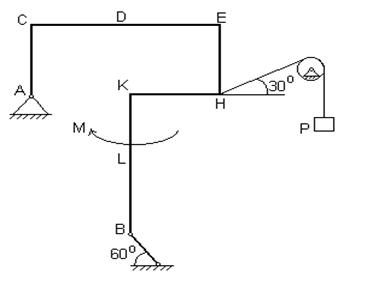
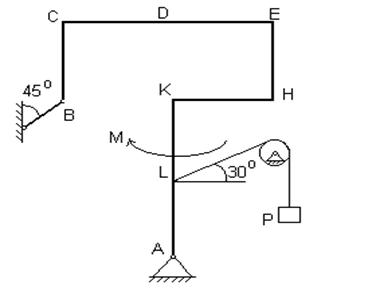
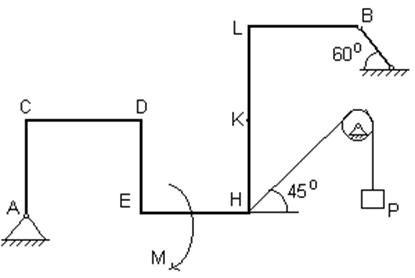
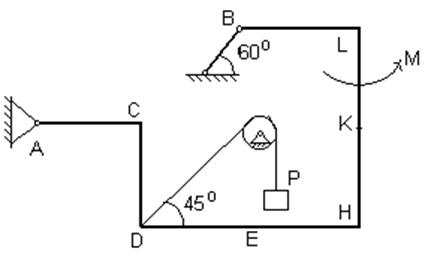
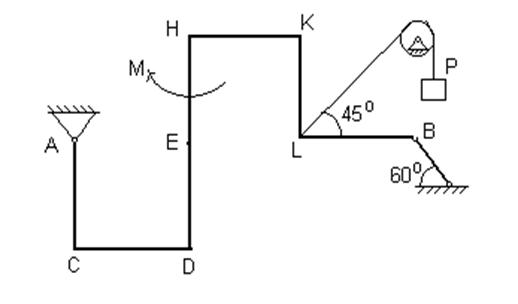
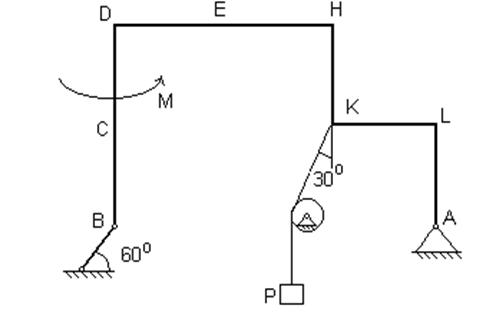
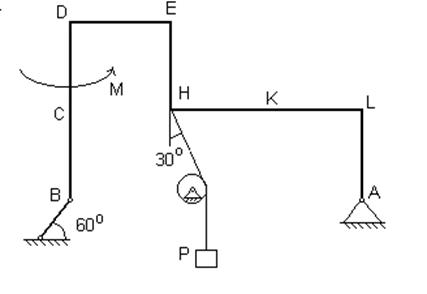
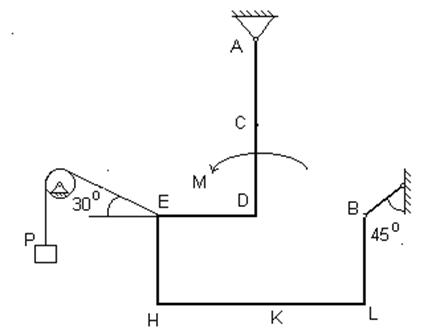
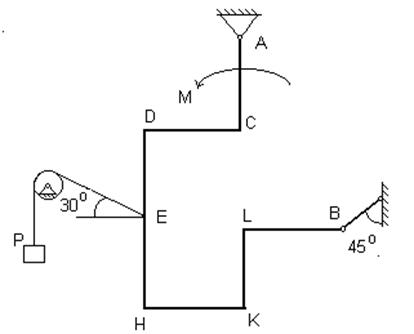
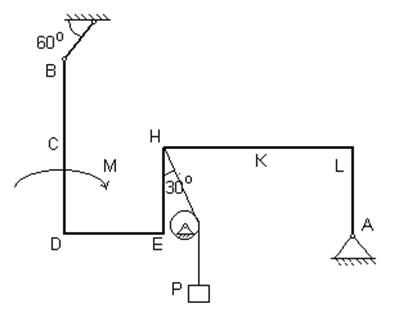
Условие задачи: Ломаная балка АВ нагружена на участке CD равномерно распределённой нагрузкой интенсивностью q è парой сил с моментом M.

К балке присоединена невесомая нерастяжимая нить, перекинутая через неподвижный блок, к концу которой привязан груз весом Р. Угол наклона нити задан на рисунке. При решении задачи трением на блоке пренебречь.
Балка закреплена неподвижным (цилиндрическим) шарниром и стержневой (упругой) связью. Угол наклона стержня задан на рисунке. Расстояние между соседними точками балки равно a=0.2м.
Определить реакции связей, наложенных на балку.
Дано: M = 14 Нм, q = 10 Н/м,
P = 16 Н, a = 0.2м.
Найти RAx, RAy, RB.
Решение:
а) Выбираем объектом исследования плоскую балку АСВ.
б) Изображаем активные силы, приложенные к объекту исследования:
-Реакцию нити Т, равную весу груза Р (так как нить невесома и нерастяжима, и нет трения на блоке, через который эта нить перекинута). Итак, Т = 16 Н.
Пару сил с моментом М = 14 Нм.
Равнодействующую равномерно распределённой нагрузки Q, равную произведению интенсивности на длину участка её действия:
Q = q CD = 10*0,2 = 2 Н.
Эта сила приложена посредине участка CD, то есть,
AH = AD + CD/2 = 3a/2 = 0,3 м.
в) Заменяем связи, наложенные на объект исследования, их реакциями:
-Неподвижный (цилиндрический) шарнир в точке А заменяем составляющими его реакциями: RAx и RAy
-Стержневую связь в точке В заменяем силой RB, направленной вдоль линии, проходящей через шарниры данного стержня.
г) Составляем условия равновесия для плоской произвольной системы сил, приложенной к объекту исследования:
SFKx = RAx - RB cos60° + Q + T cos45° = 0;
SFKy = RAy + RB sin60° + T sin45° = 0;
SMA(FK) = Q AH – M + T AC cos45° + T CE sin45° - RB AC cos60° + RB CB sin60° = 0.
д) Решая полученную систему уравнений, определяем неизвестные реактивные силы: RAx, RAy и RB:
RB = (3Q/2–M/a+2Tcos45°+T sin45°)/(2cos60°-2sin60°) = 45.42Н;
RAy = - RB sin60° - T sin45° = -50,62Н;
RAx = RB cos60° - Q - T cos45° = 9,43Н.
е) Проверка. Выберем за моментную точку Е:
SME(FK) = - RAx AC - RAy CE - Q CH– M + RB BE sin60° =
= a (-2 RAx - RAy - Q /2– M /a + RB sin60°) =
= a ( -18.86 + 50.62 –1 – 70 + 39.34) = 0,1a.
Относительная погрешность не должна превышать 1%:
D = 100%*0,1/70 = 0,1%.
Ответ: RAx = 9,43 Н, RAy = -50,62 Н, RB = 45,42 Н.
Знак минус при RAy означает, что направление этой силы обратное тому, которое показано на рисунке.
ТАБЛИЦА ИСХОДНЫХ ДАННЫХ
N | M, Нм | q, Н/м | Ó× q | P, Н | F, Н | a, град. | F |
1 | 14 | 30 | DE | 20 | 16 | 30 | K |
2 | 12 | 20 | EH | 10 | 18 | 330 | L |
3 | 10 | 10 | HK | 12 | 20 | 300 | D |
4 | 8 | 50 | KL | 14 | 10 | 240 | E |
5 | 16 | 40 | CD | 16 | 12 | 210 | H |
6 | 14 | 30 | DE | 18 | 14 | 150 | K |
7 | 12 | 20 | EH | 20 | 16 | 120 | L |
8 | 10 | 10 | HK | 10 | 18 | 60 | D |
9 | 8 | 50 | KL | 12 | 20 | 135 | E |
10 | 16 | 40 | CD | 18 | 14 | 45 | H |
ПРИЛОЖЕНИЕ
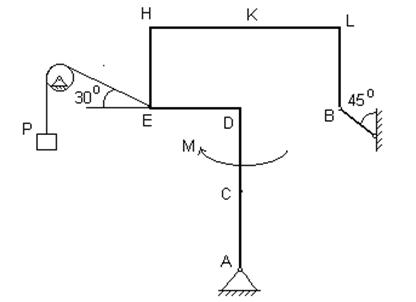
Рис. С1-1. |
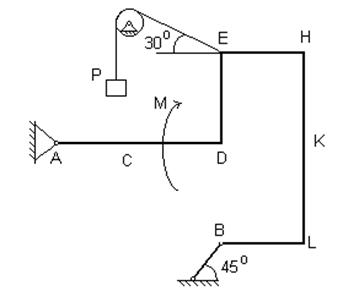
Рис. С1-2. |
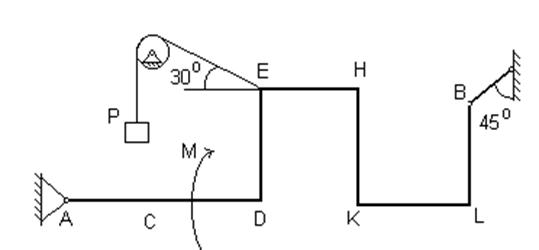
Рис. С1-3. |
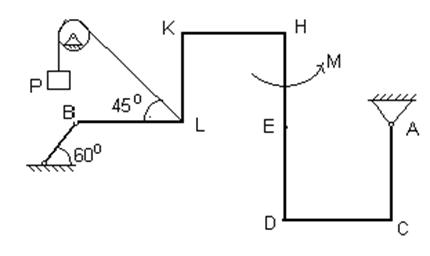
Рис. С1-4. |
Рис. С1-5. |
Рмс. С1-6. |
Рис. С1-7. |
рис. С1-8. |
Рис. С1-9. |
Рис С1-10 |
Рис. С1-11. |
Рис. С1-12. |
Рис. С1-13. |
Рис. С1-14. |
Рис. С1-15. |
Рис. С1-16. |
Рис. С1-17. |
Рис. С1-18. |
Рис. С1-19. |
Рис. С1-20. |
Рис. С1-21. |
Рис. С1-22. |
Рис. С1-23. |
Рис. С1-24. |
Рис. С1-25. |
Рис. С1-26. |
Рис. С1-27. |
Рис. С1-28. |
Рис. С1-29. |
Рис. С1-30. |