

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Раздел 10. Элементы механических передач электроприводов
10.1. Определения
Устройство, служащее для передачи момента и частоты вращения от электродвигателя к нагрузке, будем называть передачей.
Передачи разделяются на механические, гидравлические и пневматические.
Наибольшее распространение в авиационном электроприводе получили механические передачи (будем говорить о них).
Простейшая механическая передача присутствует в электроприводе при непосредственной связи электропривода с нагрузкой. В этом случае она состоит всего лишь из одного элемента – муфты сцепления. Подобная передача используется, например, в топливных насосах, вентиляторах, электромашинных преобразователях рода тока и напряжения.
В большинстве случаев в состав механической передачи входит большее число устройств (звеньев механической передачи).
10.2. Типы элементов механических предач
Наиболее распространенные элементы, входящие в состав механических передач:
1) Редукторы
2) Муфты
3) Преобразователи движения.
10.3. Редукторы.
10.3.1. Передаточное отношение
Предназначен для уменьшения угловой скорости выходного вала и тем самым, увеличения момента вращения выходного устройства по сравнению со скоростью и моментом входного вала.
Характеристикой редуктора является такой параметр как передаточное отношение. Для понижающего редуктора он рассчитывается как отношение угловой скорости ведущего вала к угловой скорости ведомого вала:
i = Wд/Wа
Большинство исполнительных механизмов ЛА требуют привода с небольшой частотой вращения, доходящей до нескольких оборотов в минуту, а в ряде случаев исполнительные механизмы должны только поворачиваться лишь на некоторый угол. А вот авиационные двигатели с целью уменьшения массы и габаритов выполняются с высокой номинальной скоростью вращения. Как правило, частота вращения исполнительного механизма Wа в 102÷104 раз меньше частоты вращения вала электродвигателя W. Для согласования частот вращения используются понижающие редукторы с общим передаточным числом системы передач составляет сотни и тысячи.
Для обеспечения требуемого передаточного отношения и оптимальной компоновки механической передачи применяют системы передач, состоящие из нескольких механизмов. Обычно число ступеней – от 3 до 6 [5].
В этом случае общее передаточное число определяется как произведение передаточных отношений отдельных ступеней.
Тип редуктора при известном общем передаточном отношении определяется исходя из соображений «вписываемости» передачи в заданные габаритные ограничения.
Одновременно с уменьшением частоты вращения происходит увеличение момента. В установившемся режиме без учета КПД редуктора справедливо
i= Ма/Мд или Ма=Мд i.
10.3.2. Потери и КПД
Основные составляющие:
1) Потери на трение в зубцах колес и подшипниках.
2) Вентиляционными потерями от вращения колес в воздушной или масляной среде.
Потери мощности учитываются коэффициентом полезного действия. КПД - есть отношение полезной мощности, снимаемой с ведомого вала редуктора Р2, к мощности, подводимой к ведущему валу Р1
hп = Р2/Р1 = МаWа/(МдWд) = Ма/(Мдi)
Мд=Ма/(ihп)
Здесь Ма – момент сопротивления приводимого агрегата, Мд – момент, развиваемый двигателем.
Итак, для приведения в движение кроме исполнительного механизма еще и механической передачи электродвигатель должен развить момент, равный основному моменту сопротивления, приведенный к валу двигателя (Ма/i) и дополнительный момент, преодолевающий момент, вызванный потерями в передаче (Ма(1-hп)/(hп i).
Основными являются потери на трение в системе передач. Введем понятие момент трения, представляющий вращающий момент, необходимый для покрытия потерь на трение.
Потери на трение (момент трения) зависят, в частности, от следующих факторов.
1) Потери на трение тем выше, чем больше передаточные отношения редукторов.
2) От момента нагрузки
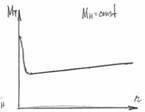
Рис. 1. Зависимость момента трения от момента нагрузки [2] | Мтр = Мо+b*Ма, где b - нагрузочный коэффициент потерь; Мо – постоянный момент трения. Все моменты приведены ко входному валу редуктора. Причиной линейной зависимости момента трения от передаваемого момента является то, что сила трения пропорциональна силе нормального давления, которая увеличивается с увеличением передаваемого момента. |

3) От скорости вращения
Рис. 2. Зависимость момента трения от скорости вращения [2] | 4) От температуры Моменты трения в системах передач авиационных электроприводов значительно увеличиваются при больших понижениях температуры передаточных механизмов. Температурный коэффициент может достигать 0,5 – 0,9 % на 1 градус Цельсия. Для устранения этого нежелательного явления применяются специальные сорта смазки, основанные на включении в смазку ряда компонентов, например, графита, кремниево-органических материалов и др., предотвращающих загустевание смазки при низких температурах. |
5) От состояния трущихся поверхностей
Поскольку момент трения определяет КПД передачи, то все перечисленные факторы влияют и на КПД передачи.
В случае нескольких ступеней в механической передаче общий КПД механической передачи определяются как произведение КПД отдельных ступеней.
10.3.3. Простые редукторы с зубчатыми колесами
|
|
Рис. 3. Схема зубчатой цилиндрической передачи (а) и зубчатой конической передачи (б) [9] На рисунке обозначено: Т – момент (Torque). Индексы: Б – быстроходное колесо; Т - тихоходное |
Отличаются высоким КПД, доходящим у одной пары колес до 0,98 [1,2], а также простотой конструкции. i=W1/W2=z2/z1. Одна пара зубчатых колес позволяет получить сравнительно небольшие передаточные отношения (не более 5 [3], не более 6 [10]). Для увеличения передаточного отношения редукторы делают многоступенчатыми. При этом, конечно, конструкция усложняется.
10.3.4. Планетарные редукторы.
Получили наибольшее распространение на ЛА [5].
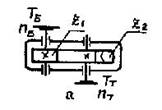
Рис. 4. Схема простого планетарного редуктора [10] | Основные элементы: 1) Ведущая (солнечная) шестерня z1 (2); расположена на ведущем валу (1). 2) Сателлиты z2 (5). Обкатываются между солнечной (2) и коренной шестеренами (4). 3) Коренная (венцовая, упорная) шестерня z3 (4). 4) Водило. Жестко соедияет оси сателлитов и ведомый вал. Передаточное число i=W1/W2 = 2(R1+R2)/R1 [5] = (z1+z3)/z1. |
Вышла замуж за механика. Родилась шестерня.
Передаточное отношение не зависит от числа сателлитов и от числа зубцов z2 на них. Число сателлитов выбирается исходя из возможностей их размещения. Как правило, выбирается равным трем, что способствует равномерному распределению нагрузок.
Передаточное отношение планетарных редукторов не более 8 [3].
КПД планетарного редуктора h=0,8-0,95 [1], 0,8-0,98 [3].
Достоинства:
1) Зацепление происходит не в одном месте, а двух или трех местах, в зависимости от числа сателлитов. Вследствие этого уменьшается нагрузка на зубцы и нейтрализуются разъединяющие силы между отдельными колесами и изгибающие моменты на входном и выходном валах. Это позволяет использовать зубчатые колеса малых размеров для передачи больших усилий [5].
2) Возможность получения больших передаточных отношений при малых габаритных размерах и массе конструкции [5].
3) Высокая технологичность. Редукторы с различным передаточным отношением могут быть собраны из одинаковых звеньев, размещенных внутри неподвижного колеса соответствующей длины [5] (рис. 5).
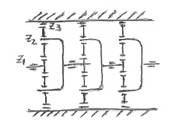
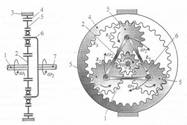
Рис. 5. Схема многоступенчатого планетарного редуктора [5]
Общее передаточное число такого многоступенчатого редуктора i=i0n
10.3.5. Дифференциально-суммирующие редукторы.
Дифференциальный механизм — устройство, позволяющее получать результирующее движение как сумму или разность составляющих движений. В данном случае – как сумму.
Применяются в двухдвигательных механизмах привода закрылков, механизмах управления стабилизатора и некоторых электромеханизмах небольшой мощности [11].
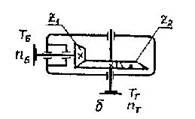
Рис. 6. Схема дифференциально-суммирующего редуктора [10] | Особенности: Коренная шестерня 4 имеет не только внутренние z3, но и внешние z4 зубцы. Первый ЭД соединяется с валом 1 солнечной шестерни планетарного редуктора. С внешними зубьями венцовой шестерни входит в зацепление промежуточная шестерня 8, которая является связующим звеном между венцовой шестерней 4 и шестерней 9, соединенной через вал 10 со вторым ЭД. Угловая скорость ведомого вала [10]:
где Ω1(1) и Ω1(2) – угловые скорости первого и второго электродвигателей; z4 – число зубьев на внешней части венцовой шестерни планетарной передачи, z6 – число зубьев на шестерне, соединенной с валом второго ЭД. |

 ,
,Достоинством этой передачи является то, что при отказе одного из двигателей электромеханизм сохраняет работоспособность. Частота вращения выходного вала уменьшается при этом вдвое, а момент остается прежним.
Число зубцов шестерен редуктора подбирается таким образом, чтобы при равных угловых скоростях ведущих валов и их сонаправленном вращении, ведомый вал имел бы удвоенную угловую скорость по отношению к ведущим. При вращении ведущих валов в разных направлениях ведомый вал будет либо неподвижен, либо получит разностную скорость вращения ведущих.
КПД=0,8-0,95 [1].
10.3.6. Червячная передача.
Рис. 7. Червячная передача [9] | Ведущим звеном является червяк (1, рис.7), ведомым звеном – червячное колесо (2, рис.7). Передаточное отношение: i=z2/z1, где z1 – число заходов червяка, z2 – число зубцов червячного колеса. Для тех, кто не знает, что такое заход червяка: Вложите палец в канавку червяка и проведите пальцем по канавке до конца. А теперь вложите в соседние две канавки два пальца и проведите ими до конца. Они могут идти по одному и тому же пути, а могут и по разным (не пересекающимся) путям. Максимальное число пальцев, которые будут идти по разным (непересекающихся) канавкам – это число заходов червяка. |
Число заходов червяка выбирают из установленных ГОСТ значений 1, 2 или 4.
Чем больше число заходов червяка – тем больше КПД передачи, но меньше передаточное число. Передачи большой мощности не выполняют с однозаходными червяками из-за низкого КПД [9].
Минимальное число зубцов червячных колес принимают для кинематических передач равным 17, в силовых передачах 28. Наиболее желательно для силовых передач z2=30…90 [9].
КПД червячной передачи:
h = tg a / tg (a+r),
где a - угол наклона винтовой линии червяка, r - угол трения.
Червячная передача может быть выполнена самотормозящейся (то есть тормозящейся при выключении двигателя).
Чтобы червячная передача затормозилась, необходимо, чтобы передача движения от колеса (ведомой части) к червяку (ведущей части) сопровождалась бы большим трением (большим тормозным моментом).
Это можно обеспечить, выбрав меньший угол наклона винтовой линии червяка (a £ r), по сравнению с обычными червячными передачами. Это, правда, снижает КПД передачи.
Достоинства:
1) Используется для изменения направления передаваемого момента.
2) Большое передаточное отношение (до 300; в самолетных электромеханизмах обычно 25-30) [5], не более 40 [1].
3) Компактность
4) Плавность и бесшумность работы [5].
Недостатки:
В обычной червячной передаче червяк и колесо имеют большую скорость относительного скольжения и сравнительно небольшую поверхность соприкосновения. Это определяет основные недостатки обычной червячной передачи:
1) Низкий КПД (не более 0,85 [5]).
2) Быстрый износ.
3) Относительно небольшая передаваемая мощность (по сравнению с прямозубой передачей).
4) Склонность червячных передач к заеданию.
5) Кроме того: Наличие осевых усилий на валах червяка и колеса вызывает усложнение конструкции подшипникового узла
Пути снижения негативных особенностей червячной передачи:
1) Увеличение поверхности соприкосновения. Достигается применением специальной конструкции червяка – так называемый глобоидальный червяк, что повышает сложность изготовления и монтажа [2].
2) Изготовление червячного колеса из специальных материалов с антифрикционными свойствами. Таким материалом, например, является оловянная бронза.
Бронза - сплав меди с оловом, алюминием, кремнием, бериллием и другими элементами, за исключением цинка и никеля. В безоловянных бронзах олова либо нет вообще, либо ее значительно меньше.
Червяк, как правило, выполняется стальным с высокой чистотой обработки активной поверхности. [4].
10.4. Механические преобразователи движения.
Предназначены для преобразования одного вида движения в другое. Наиболее распространены механические передачи с преобразованием вращательного движения в поступательное, а среди них - винтовые передачи (винтовые пары). Основными элементами винтовой пары являются винт и стакан с винтовыми канавками на внутренней стенке. Винт пары с валом электродвигателя связан, как правило, через редуктор.
Для уменьшения трения в канавки между винтом и стаканом помещаются шарики или ролики. В теле винта предусматривается возвратный канал, который создает замкнутую цепь для движения шариков. Такие передачи имеют более высокий КПД (до 0,95 [1]), поскольку в этом случае в передаче вместо трения скольжения имеет место трение качения.
Рис. Шариковая винтовая передача
Передаточное отношение определяют отношением угловой скорости входного вала (винта) W1 к линейной скорости стакана (выходного штока) Vш.
i=W1/Vш = 2p/Н
где Н – ход винта [5].
Ход винта есть осевое перемещение винта за один оборот.
Размерность такого передаточного отношения – рад/м.
КПД винтовой передачи рассчитывается так же, как и в случае червячной передачи.
Винтовая передача может быть выполнена самотормозящейся, однако КПД такой передачи не превышает 0,5.
10.5. Муфты.
10.5.1. Назначение
Муфтами называют устройства, соединяющие валы совместно работающих агрегатов и передающие вращающий момент.
Основные задачи, выполняемые муфтами:
1) Соединение (сцепление) валов.
2) Передача вращающего момента на рабочий орган механизма.
3) Ограничение передаваемого момента максимальным значением (функция предохранителя от механических перегрузок).
Цель: предотвратить чрезмерные напряжения в отдельных звеньях системы передач, элементах конструкции исполнительного механизма и перегрузки электродвигателя при случайных повреждениях элементов передачи за счет разъединения ведущего и ведомого валов.
4) Торможение ведомой части при отключении двигателя (сокращение выбега).
10.5.2. Фрикционная механическая муфта.
Фрикционная от слова "фрикция" – "трение".
Относится к простейшим муфтам пробуксовки. Различные муфты пробуксовки получили на ЛА большое распространение [1].
Муфта содержит:
1) Два комплекта фрикционных дисков. Один из комплектов связан с ведущим валом (непосредственно), а второй - с ведомым (через внутреннее зацепление зубчатого колеса).
2) Пружина, прижимающая комплект ведомых дисков к комплекту ведущих.
Момент передается через муфту за счет трения от ведущего вала через диски, сжатые пружиной, к ведомому зубчатому колесу.
Назначение: Когда момент на ведомом колесе превысит допустимую величину, ведущие и ведомые диски начнут проскальзывать друг относительно друга. После прекращения действия перегрузки муфта автоматически восстанавливает работоспособность машины, однако, точность срабатывания муфты не высока из-за непостоянства коэффициента трения на трущихся поверхностях дисков.
Максимальный передаваемый момент зависит от количества дисков, площади диска, силы сжатия пружины F и материала дисков (коэффициента трения m между дисками)
Ммакс= kmF,
где k – постоянная для данной муфты величина, определяемая геометрическими размерами и числом дисков.
При увеличении числа фрикционных дисков можно использовать диски меньших размеров (при одинаковом моменте Ммакс). Однако при этом ухудшается отвод тепла от трущихся поверхностей при пробуксовке муфты.
Коэффициент m зависит от температуры трущихся частей и от состояния поверхности дисков. Это является одним из недостатков муфты. Нагрев муфты приводит к деформации дисков, что вызывает увеличение силы, сжимающей диски и к увеличению Ммакс.
Рабочие поверхности дисков должны обладать следующими свойствами.
1) Высоким коэффициентом трения и малым влиянием на него температуры, давления на рабочей поверхности и скорости скольжения.
2) Малым изнашиванием. Диски выполняют из разных материалов, обладающих малой склонностью к образованию царапин при трении друг о друга [1]. Царапины могут вызвать увеличение сцепления дисков.
3) Теплостойкостью, т. е. способностью выдерживать высокие температуры без разрушения и с сохранением нужных свойств.
Ведущие диски выполняются металлокерамическими, а ведомые – стальными [10].
Режим проскальзывания связан с быстрым износом трущихся частей, фрикционные муфты практически не используют в случаях, когда требуется плавное регулирование момента на выходном валу.
Электромагнитные муфты
Электромагнитные муфты в электромеханизмах привода закрылков и управления стабилизаторов используются как муфты сцепления-торможения.
По типу связи ведущей и ведомой частей электромагнитные муфты делят на муфты с механической связью и с электромагнитной связью (за счет поля) [7].
10.5.3. Электромагнитные муфты с механической связью.
Муфтой с механической связью называется устройство, в котором вращающий момент, создаваемый приводным двигателем, передается от ведущей части к ведомой за счет механического трения или путем зацепления, управляемого магнитным полем электромагнита муфты [7].
Муфты этого класса делят на фрикционные и порошковые электромагнитные муфты.
Во фрикционной электромагнитной муфте передача момента происходит за счет механического трения дисков, которые притягиваются при подаче управляющего сигнала.
10.5.4. Электромагнитные порошковые муфты (ферромагнитные порошковые муфты [11]).
Рис. 8. Эскиз конструкции бесконтактной электромагнитной порошковой муфты [13] | В зависимости от способа подвода энергии к обмотке управления порошковые муфты (ПМ) делятся на контактные или бесконтактные. В контактной ПМ (рис.8) обмотка управления 3 вращается вместе с ведущей частью муфты 2 и подвод энергии осуществляется через щетки 5 и контактные кольца 4. В бесконтактной ПМ обмотка управления неподвижна. Однако, в муфте имеется паразитный зазор между неподвижным корпусом и ведущей частью муфты. Это приводит к тому, что по сравнению с контактной ПМ для создания одинаковой индукции в зазоре требуется больший ток управления (большая мощность управления). |
Принцип действия порошковой муфты основан на взаимодействии магнитных и механических сил в заполненном ферромагнитным порошком 6 рабочем зазоре и изменении магнитной вязкости ферромагнитного порошка [11]. При отсутствии тока в управляющей обмотке ведущая часть муфты вращается вместе с ротором приводного двигателя, а ведомая неподвижна. Наполнитель – ферромагнитный порошок – свободно пересыпается в рабочем зазоре.
В качестве порошка используется распыленное железо, легированная никелем или хромом сталь [8], карбонильное железо [11].
Ведомая часть выполняется в виде стакана и имеет малый момент инерции. Ведущую часть, наоборот, делают больших размеров и массы. Это способствует запасу механической энергии от двигателя, ускорению процессов разгона и торможения, т. е. безынерционности самой муфты [7].
При протекании тока в обмотке управления в магнитопроводе муфты возникает магнитный поток, силовые линии которого перпендикулярны образующим поверхностям рабочего зазора. Отдельные частички порошка намагничиваются и, взаимодействуя с соседними частицами, образуют магнитно-связанные цепи. Множество таких цепей механически связывает ведущую и ведомую части, создавая момент сцепления, препятствующий смещению частей муфты относительно друг друга. Значение момента сцепления зависит от потока в зазоре (М=kФу) и, следовательно, от тока управления Iу.
При нулевом токе управления Iу имеет место остаточный момент, обусловленный остаточной магнитной индукцией, трением в наполнителе и в уплотнителях: Мост = (0.05-0.1)Ммакс [8].
При некотором токе происходит насыщение магнитопровода, поэтому дальнейшее увеличение тока не приводит к увеличению момента сцепления.
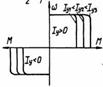
Рис.9. Механическая характеристика порошковой муфты | Пока момент нагрузки не превышает момента сцепления, ведомая и ведущая части муфты вращаются синхронно (Wвых=Wвх, Мвых=Мвх). Когда это условие нарушается, происходит проскальзывание ведомой части относительно ведущей. В этом случае для электродвигателя муфта становится дополнительной нагрузкой, создавая момент сопротивления Мсмф=Мвх–Мвых. Режим скольжения сопровождается выделением большого количества тепла (потери мощности ΔР=М(W1-W2)). Для предотвращения спекания порошка в его состав добавляют различные примеси (минеральные масла, керосин, графит, тальк, окись цинка или магния, порошкообразная слюда [+11]), которые увеличивают вязкость смеси [7]. |
Добавки должны обладать следующими свойствами: высокой термо - и износоустойчивостью, высокой теплопроводностью, быть химически нейтральными [11].
Негативные последствия режима проскальзывания обуславливают нецелесообразность использования порошковых муфт для регулирования частоты вращения выходного вала.
Достоинство порошковых электромагнитных муфт:
1) плавность сцепления [5];
2) отсутствие износа рабочих поверхностей при проскальзывании. Скольжение происходит между частицами порошка главным образом в центре рабочего зазора [5];
3) возможность регулирования выходного момента [7];
4) высокое быстродействие [7,11]; этому способствует высокое значение отношения вращающего момента к моменту инерции ведомой части муфты, что обеспечивает большие ускорения – до 105 рад/сек2. У ДПТ такой же мощности – до 0,2*105 рад/сек2 [7].
5) малая мощность управления [11] и, как следствие, большой коэффициент усиления по мощности (достигает 120 [6]). Обеспечивается за счет высокой магнитной проводимости среды, заполняющей рабочий зазор муфты [8];
6) линейная зависимость передаваемого момента (момента сцепления) от тока управления. (Подобные муфты не используют при насыщенном магнитопроводе) [7, 11].
Недостатки порошковых муфт:
1) сложность конструкции механических узлов; соответственно, меньшая надежность.
2) выделение большого количества тепла при больших скольжениях, что требует специальных мер для охлаждения;
3) непостоянство магнитных свойств порошка, а следовательно и характеристик муфт при изменениях температуры и влажности;
4) ограничение по угловой скорости вращения ведущих частей муфты (около 2000 об/мин), связанная с нарушением нормальной работы муфты под влиянием чрезмерно больших центробежных сил, действующих на наполнитель [8].
Нашей промышленностью были разработаны и выпускались серия электромагнитных порошковых муфт с передаваемыми моментами от 0,063 до 6,3 Нм и с частотой вращения ведущей части 2000 об/мин [7].
10.5.5. Электромагнитная муфта без механической связи (с электромагнитной связью)
Рис. 10. Конструкция электромагнитной асинхронной муфты [12] | Муфта устроена по принципу асинхронного двигателя и служит для соединения двух частей вала. На ведущей части вала 1 помещается полюсная система 2, представляющая собой систему явно выраженных полюсов с катушками возбуждения. Постоянный ток в катушке возбуждения подводится через контактные кольца 4. Ведомая часть муфты 3 содержит короткозамкнутую обмотку. При вращении ведущей части и протекании тока по обмотке возбуждения создается вращающееся магнитное поле, которое наводит токи в короткозамкнутой обмотке. В результате взаимодействия тока и потока создается вращающий момент, при помощи которого осуществляется связь между валами. В такой электромагнитной муфте осуществляется бесконтактная связь между валами. Регулируя ток возбуждения, можно изменять уровень передаваемого момента. |
Разъединение муфты производится отключением тока возбуждения. Управление электрическим током позволяет осуществлять дистанционное управление муфтой (плавно сцеплять и расщеплять ее). Поэтому ее применяют в автоматике и телемеханике [12].
При рассмотрении стартера мы упомянули об обгонной и центробежной храповой муфте. Эти муфты осуществляют механическое соединение вращающихся частей или позволяют им свободно вращаться друг относительно друга в зависимости от направления передаваемого момента.
10.5.6. Муфты свободного хода
10.5.6.1. Фрикционная муфта свободного хода
Назначение этой муфты – передача вращающего момента от ведущей детали к ведомой (как и у других муфт). Особенностью муфт свободного хода является то, что они передают вращающий момент только в одном определенном направлении и до тех пор, пока угловые скорости вращения ведущего и ведомого звеньев остаются одинаковыми. Как только угловая скорость ведомого звена превысит скорость ведущего, муфта автоматически разъединяет сцепленные части.
По принципу действия эти муфты делят на фрикционные и храповые. Наибольшее распространение получили первые благодаря бесшумности, малому “мертвому ходу”, способности работать при высоких окружных скоростях [9].
Рис. 11. Эскиз конструкции роликовой фрикционной муфты свободного хода [9]
| Муфта состоит из обоймы 1, звездочки 2, нескольких роликов (или шариков) 3, толкателей 7 и пружин 8. Количество роликов от 3 до 8. Ведущим элементом муфты может быть как звездочка, так и обойма. Для передачи вращающего момента необходимо создать условия для заклинивания роликов между поверхностями ведущего и ведомого элементов муфты. Если ведомая часть вращается с более высокой скоростью – такое условие не выполняется: ролик силами трения о звездочку и обойму смещается в более широкую часть клинового зазора и полумуфты размыкаются. Рассмотренная муфта сложна в изготовлении звездочки, так как малейшие ошибки в изготовлении опорной поверхности для ролика влияют на надежность работы муфты. Недостатком муфты является также ее малая несущая способность из-за ограничения числа роликов по конструктивным соображениям [9]. |
10.5.6.2. Храповая муфта.
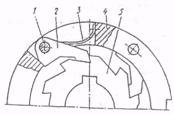
Рис. 12. Эскиз конструкции храповой муфты
1- ось; 2-собачка; 3-пружина; 4-обойма; 5 –звёздочка.
Литература:
1. , . Автоматизированный электропривод летательных аппаратов. Киев. 1974. 392с.
2. , . Электрификация самолетов. Том 2. Электропривод самолетных агрегатов и механизмов. Москва. 1952. 808с.
3. , . Особенности электропривода летательных аппаратов. Москва. 1986. 80с.
4. http://www. su. ac. ru/lc/lr7/llr_inroduction7.htm
5. . Электрооборудование самолетов. М., «Машиностроение», 1977, 304с.
6. Электропривод летательных аппаратов./, , и др. Под общ. ред. . М.:Машиностроение, 1990. – 352с.
7. , . Проектирование и расчет автоматизированных приводов. М.:Машиностроение.1990. – 368с.
8. Электропривод систем управления летательных аппаратов. Под ред. . М.,Машиностроение, 1973, 360с.
9. http://www. bmstu. ru/~rk3/okdm/okdm. htm
10. , , . Электрофицированное оборудование летательных аппаратов. М. Военно-воздушноая инженерная академия им. . 2004. – 319с.
11. , , . Электрооборудование летательных аппаратов. Москва. 1982. 280с.
12. http://www. /tgpu/resources/Elektrotehnika/vorop5.htm
13. http://uiits. miem. edu. ru/Falk/kniga_TSAU/glavi/glava_7/7_3.html
