
Силовая часть инвертора выполняется на силовых полупроводниковых приборах:
– на транзисторах (в случае малых и средних мощностей – до десятков киловатт, до нескольких десятков ампер [4]);
– на тиристорах (для средних и больших мощностей – от десятков до тысяч киловатт. Долгое время только они и мог применяться при больших мощностях [25]);
– на базе биполярных транзисторов с изолированным затвором - IGBT (Insulated Gate Bipolar Transistor), рассчитанных на токи до нескольких килоампер, напряжение до нескольких киловольт и имеющих частоту коммутации 30 кГц и выше [26].
Транзисторы или тиристоры работают в ключевом режиме, характеризующемся двумя устойчивыми положениями – открытым для прохождения тока или закрытым. Переход из одного положения в другое происходит в зависимости от пространственного положения ротора или сигналов с других датчиков.
Для обеспечения симметричности загрузки m-фазной ОЯ, повторяемости процессов и нормальной работы ключей инвертора необходимо, чтобы фазовый сдвиг между управляющими сигналами ключей анодной (верхней) и катодной (нижней) группы инвертора был равен 2π/m, а фазовый сдвиг между управляющими сигналами ключей одной стойки был равен π [10].
Распространенными вариантами работы ключей инвертора трехфазного ВД является два:
1) 120 – градусная коммутация, то есть в пределах периода (360 градусов) каждый ключ работает 120 градусов.
2) 180-градусная (синусная коммутация).
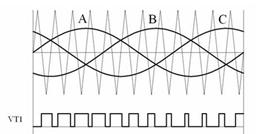
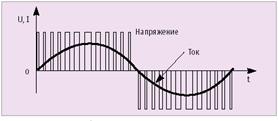
Время открытого состояния ключа не остается неизменным в течение полупериода выходной частоты, а изменяется по синусоидальному закону (рис. 5а).
На вход компаратора подается сигнал несущей синусоиды и сигнал пилообразного напряжения. В приведенном примере, транзистор будет включен, когда значение напряжения несущей синусоиды будет превышать значение пилообразного напряжения (рис. 5а).
а) |
б) |
Рис. 5. Формирование синусоидального напряжения при ШИМе |
5.9. Датчик положения ротора (ДПР)
В иностранной литературе - Shaft Position Sensor, Shaft Encoder [15].
ДПР является элементом позиционной обратной связи. ДПР предназначен для создания сигналов, несущих информацию об относительном положении осей полюсов ротора и осей фаз статорных обмоток двигателя. Для трехфазной обмотки эти углы равны a, a-120, a-240, где угол a определяется текущим положением ротора.
Сигнал с ДПР служит для управления подключением тех фаз электродвигателя, которые создадут максимальный момент при взаимодействии с полюсами ротора.
Датчик располагается в корпусе электромеханической части двигателя, но схемно связан с коммутатором.
5.9.1 Требования, предъявляемые к ДПР:
1) Простота конструкции, технологичность в изготовлении, надежность в работе.
2) Должен иметь малые размеры. Размеры датчика не должны превосходить размеров щеточно-коллекторного устройства [1].
3) Потребляемая энергия должна быть малой. Потребляемая мощность не должна превосходить потерь на щетках эквивалентных коллекторных машин [1].
4) Требования к форме сигнала. Хорошее согласование сигнала датчика с входными цепями инвертора. Большая кратность максимального и минимального выходного сигнала. Большая крутизна нарастания и спада сигнала. Чем в более полной степени выполняется требование 4, тем меньше усложнений придется предусматривать в схеме управления инвертором для обеспечения надежного и экономичного режима переключения ключей [1].
5) Высокая стойкость к внешним факторам окружающей среды. ДПР должен работать во всем диапазоне воздействий, которым подвергается электродвигатель: температура, свойства среды, вибрация [4].
6) Помехоустойчивость.
5.9.2. Устройство ДПР
ДПР состоит из двух основных элементов:
1) Сигнального (или управляющего) элемента (СЭ).
Сигнальный элемент (СЭ) связан с ротором двигателя.
2) Чувствительного элемента (ЧЭ).
Чувствительные элементы установлены на неподвижной части машины. Число чувствительных элементов в ДПР обычно равно числу фаз обмотки якоря двигателя. К чувствительным элементам подводится питающее напряжение.
Рис. 6. Составные части ДПР | При достижении СЭ определенного углового положения он входит во взаимодействие с чувствительным элементом, то есть бесконтактно воздействует на него энергией своего физического поля (магнитного, светового, электрического – в зависимости от типа сигнального и чувствительного элемента). В ЧЭ происходит преобразование этой энергии в электрический сигнал. Этот электрический сигнал поступает в систему управления инвертором и используются для управления коммутатором ВД. |
5.9.3. Классификация ДПР.
По форме сигнала ДПР делятся на две группы:
1) дискретные;
2) аналоговые.
Дискретные ДПР выдают выходной сигнал одного уровня. Он имеет прямоугольную форму (стремятся получить такую) и имеет определенную длительность [15].
Аналоговые ДПР выдают сигнал, величина которого зависит от текущего углового положения ротора. Например, сигнал ДПР может изменяться в зависимости от угла по синусоидальному закону [15].
Также ДПР разделяются на группы по типу чувствительных элементов, преобразующих тот или иной вид энергии в изменение электрического или магнитного параметра.
В соответствии с этим признаком выделим три типа ДПР:
1) Фотоэлектрические (также их называют оптоэлектрическими и датчиками оптического типа [15]).
2) Индуктивные.
3) Гальваномагнитные.
5.9.4. Фотоэлектрические датчики
Используются в маломощных ВД.
Элементами фотодатчика являются:
- источник лучистой энергии (светодиод), расположенный на неподвижной части;
- приемник лучистой энергии - чувствительный элемент (фотоэлемент: фотодиод, фоторезистор, фототранзистор, фототиристор), расположенный на неподвижной части;
- модулятор потока лучистой энергии, расположенный на роторе.
Модулирование потока лучистой энергии может быть обеспечено:
--- при использовании тонкого диска с отверстиями или прорезями;
--- за счет покрытия облучаемой поверхности ротора отражающими и неотражающими излучение материалами.
То есть модулятор может работать на просвет, либо на отражение. Число импульсов определяет положение и скорость вращения ротора ВД.
Достоинства:
1) Источник лучистой энергии (светодиод) и приемник (фототранзистор) располагаются на неподвижной части.
2) Ротор (якорь) ДПР (в случае исполнения его в виде диска с прорезями) имеет минимальный момент инерции, что является важным при использовании ВД в качестве исполнительного двигателя [11].
3) Ротор прост по конструкции [15].
4) Ротор не создает никаких реактивных моментов, что важно для высокоточных приводов [15].
5) Датчики этого типа позволяют получить достаточно крутой фронт сигнала [15].
6) Компактность конструкции ДПР в многополюсных двигателях относительно большого диаметра. Это обеспечивается за счет расположения n чувствительных элементов на одной линии по радиусу и применения для каждого ЧЭ своей прорези на экране-якоре. Эти прорези должны иметь угловое смещение относительно друг друга, равное угловому сдвигу чувствительных элементов обычного датчика [15].
Недостатки:
1) невысокий КПД из-за двойного преобразования энергии (электрической в световую и обратно) [9].
2) низкий уровень выходного сигнала [15].
3) малая чувствительность, обуславливающая необходимость фокусировки луча с помощью оптических линз [9].
4) слабая помехозащищенность, вынуждающая применять специальные меры устранения размытости фронта сигнала; влияние других источников излучения [9].
5) ненадежность из-за возможности загрязнения поверхности элементов [15].
5.9.5. Индуктивные датчики
Принцип действия индуктивных датчиков основан на изменении индуктивного сопротивления:
xL=wL=wGw2, (9)
где w =2πf, L – индуктивность обмотки датчика, G – магнитная проводимость контура замыкания магнитного потока, w – число витков обмотки индуктивного датчика.
По виду ЧЭ разделяются на:
- дроссельные.
- трансформаторные.
Рассмотрим один вариант построения дроссельного индуктивного датчика, показывающий принцип действия датчиков такого типа (рис. 7).
Рис. 7. Схема индуктивного ДПР [15] | Основные элементы датчика: - дроссель насыщения, представляющий собой кольцевой сердечник с обмоткой, расположенный на неподвижной части двигателя [15]. В качестве сердечников ЧЭ применяются, как правило, ферриты с прямоугольной петлей гистерезиса [11]. |
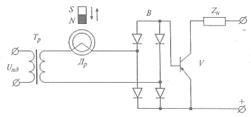
Обмотка чувствительного элемента запитывается переменным напряжением повышенной частоты (30-60 кГц), получаемым с выхода вторичного источника питания. Выпрямленный ток обмотки является током управления для тразистора, в цепь которого включена нагрузка. На цепочку коллекторно-эмиттерный переход транзистора – нагрузка подано постоянное напряжение [15].
- постоянные магниты, представляющие собой р секторов якоря ДПР, закрепленного на валу двигателя.
Когда магниты находятся от сердечника на удаленном расстоянии, он не насыщен и его обмотка обладает большим индуктивным сопротивлением (9). Ток в цепи практически отсутствует. Транзистор закрыт, выходное напряжение датчика равно нулю [15].
По мере приближения одного из постоянных магнитов по сердечнику дросселя замыкается все больший магнитный поток и сердечник насыщается. Индуктивное сопротивление обмотки существенно снизится, по цепи эмиттер-база пойдет ток и транзистор откроется [15].

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
