

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Некоторые результаты применения
когерентных методов обработки сигналов МАИК в задачах измерения и исследования шумов кораблей
,
Общие вопросы измерений шумов кораблей при использовании антенной решетки.
Одним из возможных направлений применения Морского Автономного Измерительного Комплекса (МАИК) [1,2] является задача по исследованию и измерению шумов кораблей. Рассматривая в целом проблему обесшумливания кораблей, в работе [3] отмечается, что её решение не ограничивается рамками интересов только военного назначения, но и представляет важное значение в решении задач экологического характера в силу того, что шум кораблей оказывает неблагоприятное влияние на состояние морской фауны и жизни населения прибрежных районов.
В этой связи, вопросы контроля за уровнями шумности кораблей, судов и других технических средств морского и прибрежного базирования (далее по тексту объектов), ставятся в одну из главных задач при их аттестации. При этом следует отметить, что в связи с тенденцией некоторого снижения шумности объектов и появлению в перспективе новых требований, в частности, связанных с необходимостью локализации источников шума, решение отмеченной задачи усложнилось и потребовало разработки измерительных средств с развитой приемной гидроакустической системой.
Пространственно-развитая приемная антенна позволяет решать следующие измерительные задачи:
- повышать помехоустойчивость при приеме сигнала объекта в условиях значительной фоновой помехи (например, интенсивного судоходства) за счет отстройки по диаграмме направленности от наиболее интенсивных источников;
- осуществлять поиск источников с повышенным шумоизлучением (акустическое портретирование) за счет возможности фокусировки антенны в заданную точку пространства;
- восстанавливать уровни дальнего поля [4,5] путем регистрацию амплитудно–фазового распределения поля в ближней зоне объекта и разложения поля по плоским волнам;
- выполнять регистрацию и обработку сигнала рассеянного объектом поля в задачах определения характеристик рассеяния [6].
В данной работе основное внимание будет уделено первым двум задачам: - повышению помехоустойчивости и поиску источников при приеме сигнала линейной фазированной АР (ФАР).
Для проведения измерений шумности объекта на ходовых режимах антенна МАИК (первый вариант антенны МАИК представляет собой эквидистантную линейную антенную решетку (АР), состоящую из N=32…64 ненаправленных гидрофонов, расположенных друг от друга на расстоянии d=3м) выставляется на заданную глубину ![]() параллельно поверхности моря (рис.1). В процессе проведения испытаний объекта, сигналы с гидрофонов АР подлежат непрерывному синхронному аналого-цифровому преобразованию с занесением данных в память комплекса. Результаты регистрации сигналов можно представить виде матрицы текущих значений звукового давления:
параллельно поверхности моря (рис.1). В процессе проведения испытаний объекта, сигналы с гидрофонов АР подлежат непрерывному синхронному аналого-цифровому преобразованию с занесением данных в память комплекса. Результаты регистрации сигналов можно представить виде матрицы текущих значений звукового давления:
![]() . (1)
. (1)
Здесь: n-номер гидрофона АР, ![]() -текущее время,
-текущее время, ![]() - дискретность преобразования сигналов, определяемая рабочей частотой квантования
- дискретность преобразования сигналов, определяемая рабочей частотой квантования ![]() комплекса (
комплекса (![]() ).
).
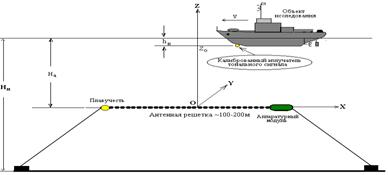
Рис.1. Представление схемы проведения измерений шумности объекта на ходовых
режимах с использованием МАИК
Основной схемой обработки АР является суммирование с весовыми функциями ![]() сигнала с отдельных приемных элементов с ведением в каждый канал временных задержек
сигнала с отдельных приемных элементов с ведением в каждый канал временных задержек ![]()
![]() (2)
(2)
Здесь ![]() ;
; ![]() ;
;  - разность хода лучей,
- разность хода лучей, ![]() – расстояние от точки фокусировки с координатами (Xф, Yф, Zф) до центра антенны,
– расстояние от точки фокусировки с координатами (Xф, Yф, Zф) до центра антенны, ![]() – расстояние от точки фокусировки до гидрофона с номером n¢; С – скорость распространения звука в море, оператор fix означает целую часть от выражения, взятого в скобки {}.
– расстояние от точки фокусировки до гидрофона с номером n¢; С – скорость распространения звука в море, оператор fix означает целую часть от выражения, взятого в скобки {}.
Введение временных задержек осуществляется для целей фазирования (ориентации) АР в выбранную точку Tф пространства (рис.2.) в системе координат связанной с приемной АР.
В ряде случаев, например, для исследования динамики излучения объекта, точка, в которую производится фокусировка антенны, может быть «привязана» к движущемуся объекту. В этом случае временная задержка tn¢,j. оказывается функцией двух переменных n и j.
Весовая функции Kn, с которой производится суммирование сигнала, исходя из достижения максимума соотношения сигнал/шум выбирается в виде
Kn¢ =![]() . (3)
. (3)
Здесь ![]() - мощность помехи на выходе гидрофона с номером n¢, ro – расстояние, к которому приводится уровень источника (как правило 1м или 50м). Как видно из (3), для монопольного источника, находящегося в точке фокусировки, и свободного пространства (pn, j = po/Rn) выражение (2) дает строго уровень источника на расстоянии ro (po/ ro).
- мощность помехи на выходе гидрофона с номером n¢, ro – расстояние, к которому приводится уровень источника (как правило 1м или 50м). Как видно из (3), для монопольного источника, находящегося в точке фокусировки, и свободного пространства (pn, j = po/Rn) выражение (2) дает строго уровень источника на расстоянии ro (po/ ro).
Для получения максимального разрешения по пространству, например при локализации источника, весовая функция может быть выбрана в более простом виде
 (4)
(4)
В этом случае уровень сигнала на линейной апертуре постоянная величина и реализуется более острая диаграмма направленности.
Необходимо отметить, что на период проведения испытаний, на подводную часть корпуса объекта может быть установлен тональный излучатель калиброванной частоты и уровня, по сигналам которого после съема и обработки информации (1) в соответствии с методикой [7] определяют траекторию движения объекта на измерительном галсе. На полученной таким образом трассе движения определяются координаты точки ![]() (рис.2), в которую при последующей обработке производят фокусировку сигналов. В качестве выбранной точки может быть точка траверса, или точки, удаленные от точки траверса на определенное расстояние (для исследования излучения в кормовом и носовом ракурсах).
(рис.2), в которую при последующей обработке производят фокусировку сигналов. В качестве выбранной точки может быть точка траверса, или точки, удаленные от точки траверса на определенное расстояние (для исследования излучения в кормовом и носовом ракурсах).
При установке на объекте импульсного источника оказывается возможным прямым способом производить измерение текущих значений задержек tn¢,j на гидрофонах, вводить их в сигнал и тем самым осуществлять исследование динамических процессов в излучении объекта (например, при изменении оборотов двигателя или включении различного оборудования.).
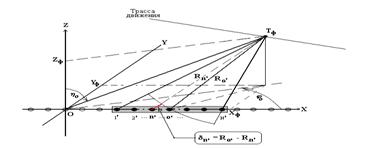
Рис.2. Геометрия фокусировки сигналов c приемников выделенной группы АР (номера n¢=1¢,2¢ …o¢… N¢). Приемник с номером o¢ полагается центральным.
В результате использования обработки (2) с выхода сумматора получают широкополосный сфокусированный сигнал. Физически данный метод представляет собой измерение с использованием направленной приемной системы [8,9]. Для группы приёмников, расположенных горизонтально и без изгибов и, соответственно, обладающих осевой симметрией, характерный вид пространственной диаграммы направленности в трехмерном представлении приведен на рис.3. В проекции на плоскость YOZ диаграмма направленности АР является круговой (ненаправленный приём). В проекциях на плоскости XOZ и XOY диаграммы представляются функцией подобной sinX/X, острота максимума которой зависит от частоты и от значений параметров АР.
Как видно из рис.3, при измерении интегрального уровня шума выгоднее курс корабля прокладывать перпендикулярно приемной системе. При этом весь корпус корабля оказывается в луче диаграммы направленности приемной антенны, уровень проходной характеристики окажется максимальным и будет близок к уровню проходной характеристики на одиночном гидрофоне (при большом соотношении сигнал/шум).
Основное ограничение на число элементов N¢, по которым производится суммирование, это необходимость того, чтобы размер пятна диаграммы направленности на траверсной дистанции превышал поперечный размер объекта - D
![]() , где l - длина волны на максимальной частоте. (5)
, где l - длина волны на максимальной частоте. (5)
При поиске и локализации источника курс судна должен быть параллельный антенне, при этом будет достигаться максимальное разрешение источников по длине его корпуса.
|
|

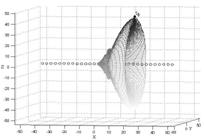
Рис.3. Характерный вид диаграммы направленности сфокусированной АР (N=32, d=3м).
А – параметры: Xф=0м, Yф=0м, Zф=40м ; B – параметры: Xф=30м, Yф=0м, Zф=40м.
В основу методики измерения уровней подводного шума движущегося объекта в заданных полосах частот ![]() спектрального анализа с центральной частотой
спектрального анализа с центральной частотой ![]() (1/3-октавный, октавный или узкополосный анализ) положен принцип определения максимального значения уровня на, так называемой, энергетической проходной характеристике (ПХ) анализируемого сигнала. Вычисление ПХ, как совокупности текущих среднеквадратичных значений сигнала, выполняют по алгоритму функционирования квадратичного детектора с интегратором при установке времени усреднения
(1/3-октавный, октавный или узкополосный анализ) положен принцип определения максимального значения уровня на, так называемой, энергетической проходной характеристике (ПХ) анализируемого сигнала. Вычисление ПХ, как совокупности текущих среднеквадратичных значений сигнала, выполняют по алгоритму функционирования квадратичного детектора с интегратором при установке времени усреднения ![]() в соответствии с шириной 1/3 октавной полосы частот анализа.
в соответствии с шириной 1/3 октавной полосы частот анализа.
Иллюстрация применения методов когерентной обработки сигналов, полученных с использованием МАИК в натурных условиях.
Апробация методов когерентной обработки сигналов по определению уровней подводного шума движущегося объекта проводилась на Балтийском море в районе с глубиной места ![]() , удаленного от трассы интенсивного судоходства на расстоянии »10миль. В качестве объекта испытаний использовался водолазный морской бот - ВМ водоизмещением »300т (длина судна 42м, осадка »2м). Измерения шумности ВМ выполнялись на прямолинейных галсах при скорости движения »3 узлов. В качестве приемной системы МАИК применялась АР из 48 гидрофонов (d=3м).
, удаленного от трассы интенсивного судоходства на расстоянии »10миль. В качестве объекта испытаний использовался водолазный морской бот - ВМ водоизмещением »300т (длина судна 42м, осадка »2м). Измерения шумности ВМ выполнялись на прямолинейных галсах при скорости движения »3 узлов. В качестве приемной системы МАИК применялась АР из 48 гидрофонов (d=3м).
Представляемые ниже материалы демонстрируют результаты обработки сигналов по двум галсам, условно обозначенным как: 1) – галс-х с проекцией трассы на плоскость ХОY, пересекающей линию АР, и 2) – галс-п (параллельный)- без пересечения линии АР (рис.4,5).
Параметры проекций трасс соответствующих галсов по углу наклона ![]() и величине смещения
и величине смещения ![]() , а также глубины
, а также глубины ![]() установки АР и скорости движения на галсах определены значениями: для галса-п ®
установки АР и скорости движения на галсах определены значениями: для галса-п ® ,
,  ,
, ![]() 39м,
39м, ![]() ; для галса-х ®
; для галса-х ® ![]() ,
, ![]() ,
,![]() 45м,
45м, ![]() . Взятые в обработку сигналы на длине измерительных галсов по своей продолжительности составляли »400с. Разнос по времени между галсами составлял около часа.
. Взятые в обработку сигналы на длине измерительных галсов по своей продолжительности составляли »400с. Разнос по времени между галсами составлял около часа.
|
|
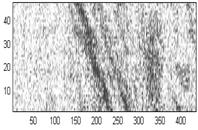
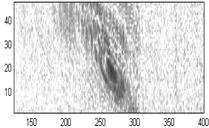
Рис.4. Сонограммы ПХ сигналов с приемников АР на частоте 322Гц в полосе DF»1Гц, по которым выполнялось определение параметров трассы движения ВМ на измерительных галсах. Ось ординат - номер приемника АР, ось абсцисс – время.
Существенной особенностью при проведении измерений шумности ВМ на галсе-х являлось наличие в секторе ~30°…40° источника сторонней помехи.
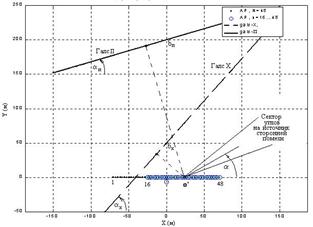
Рис.5. Проекции трасс движения ВМ относительно АР МАИК
Процесс обработки и вычисления сфокусированного сигнала выполнялось по данным с приемников 16…48 (N¢=33) с весовым множителем, заданным выражением (4). Спектральный анализ при определении ПХ проводился для диапазона частот 20-250Гц с установкой значений DF»1Гц и ![]() . При обработке сигналов использовалось программное обеспечение из пакета Matlab11 [10], в частности, программа Specgram по определению текущих узкополосных спектров.
. При обработке сигналов использовалось программное обеспечение из пакета Matlab11 [10], в частности, программа Specgram по определению текущих узкополосных спектров.
Полученные результаты обработки сигналов с одиночного приемника АР и по сфокусированным сигналам приведены на рис.6…9. На графиках представлены:
- рис.6 и рис.8 - фрагменты узкополосных спектров (полученных на основе максимума ПХ) с выделенными для примера дискретными составляющими (ДС), сонограммы текущих спектров для одиночного приема и приема сигнала АР;
- рис.7 и рис.9 - проходные характеристики сигналов дискретных составляющих спектров на частотах 99.5, 198.6, 234, 238 Гц для галса-п и на частотах 99.5, 242 Гц галса-х.
|
|
|
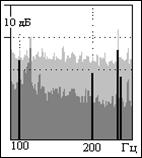


Рис.6. Галс - П. Результаты спектрального анализа шумности ВМ.
А - Фрагмент узкополосного спектра максимальных значений, B - Сонограмма текущих спектров по сигналу с 32 приемника АР, С – Сонограмма текущих спектров по сфокусированному сигналу (приемники 16…48).
Рис.7. Галс - П. Проходные характеристики сигналов на частотах ДС.
Обозначения: ---- - ПХ по сигналу с одиночного приемника АР n=32;
--·-- ПХ по сфокусированному сигналу (n=16…48).



Рис.8. Галс - Х: А - Фрагмент узкополосного спектра максимальных значений, B - Сонограмма текущих спектров по сигналу с 32 приемника АР, С – Сонограмма текущих спектров по сфокусированному сигналу (приемники 16…48).
Рис.9. Галс - Х. Проходные характеристики сигналов на частотах ДС.
Обозначения: ---- - ПХ по сигналу с одиночного приемника АР n=32;
--·-- ПХ по сфокусированному сигналу n=16…32.
Из анализа рисунков можно сделать следующие выводы. В условиях сильных помех, когерентная обработка сигналов с АР позволяет уверенно выделить и измерить уровни проходной характеристики (см. рис.7 и рис.9), что практически невозможно выполнить по сигналу с одиночного приемника. Как указывалось ранее, при продольном галсе () вид проходной характеристики имеет резкий спад и подъем. При направлении движения объекта более близком к перпендикулярному (![]() ) наблюдается довольно растянутая проходная характеристика, по которой труднее локализовать местоположение максимума.
) наблюдается довольно растянутая проходная характеристика, по которой труднее локализовать местоположение максимума.
Еще одним преимуществом использования АР является большая информативность при идентификации принадлежности дискретных составляющий спектра объекту. Так, например, на рис.10 и рис.11 для частоты 99.5 Гц изображены текущие значения пространственного спектра сигнала (сонограммы пространственных спектров), из которых, несмотря на отличия, обусловленные прохождением АР под разными углами, явно следует, что источник, работающий на частоте 99.5Гц перемещается по углу относительно приемной системы, что свидетельствует о принадлежности ДС измеряемому объекту.
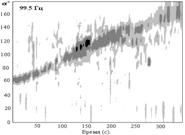
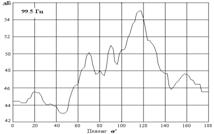
Рис.10. Галс - П. Сонограмма ПХ на частоте 99.5Гц, полученная при разложении сигналов АР по плоским волнам в зависимости от угла a (рис. слева),
и угловое распределение уровней (правый рисунок).
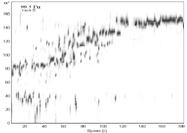
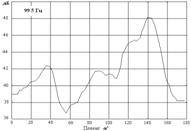
Рис.11. Галс-Х. Сонограмма ПХ на частоте 99.5Гц, полученная при фазировании сигналов АР по плоским волнам в зависимости от угла a (рис. слева),
и угловое распределение уровней (правый рисунок).
Противоположный случай представлен на рис.12. Здесь для частоты 175Гц, также представлена сонограмма пространственного спектра для временного интервала, полностью совпадающего с интервалом времени данные по которому представлены на рис.11.
Из рис.12 явно следует, что дискретная компонента на частоте 175Гц не принадлежит измеряемому объекту и приходит на АР с направления a~35°. Этот же вывод можно сделать рассматривая проходные характеристики на частоте 175Гц (рис.13) при фокусировке антенны в точку траверса и при фокусировке в направлении пеленга a¢ = 35°. Уровни сигнала антенны и сигнала с одиночного приемника близки, когда антенна ориентирована по пеленгу 35° и существенно отличаются при фокусировке антенны в точку траверса.

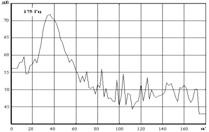
Рис. 12. Галс - Х. Сонограмма ПХ на частоте 175Гц источника помехи, полученная при фазировании сигналов АР по плоским волнам в зависимости от угла a и угловое распределение уровней. Максимум анизотропии в представленных распределениях приходится определяется направлением по углу a » 35°- 40°.
Рис.13. Галс - Х. ПХ сигнала на частоте 175 Гц источника сторонней помехи.
Левый рисунок - фокусировка в траверсную точку трассы измерительного галса.
Правый рисунок - фокусировка по пеленгу источника сторонней помехи.
Обозначения: ------ - ПХ с одиночного приемника n=32;
---·---- ПХ сфокусированного сигнала n=16…48.
Рассмотрение и анализ представленных материалов позволяет отметить, что по отношению к методике выполнения измерений уровней шумоизлучения объекта с использованием одиночного ненаправленного приемника, методика измерений и когерентной обработки сигналов акустического поля с применением АР обладает рядом преимуществ.
Прежде всего это касается возможности проведения измерений в условиях фоновой помехи, уровни которой соизмеримы либо до 10-15дБ превышают уровни подводного шума объекта. Здесь же следует добавить, что реализуя алгоритм определения частотно-углового распределения уровней фоновой помехи, представляемая методика обеспечивает возможность внесения соответствующих поправок в получаемые результаты измерений (например, исключение из спектра шумоизлучения объекта дискретных составляющих фоновой помехи) .
Также исходя из анализа проходных характеристик сфокусированных сигналов, трассы которых “параллельны” к линии установки АР, следует заметить, что в силу остроты максимумов, когерентная обработка сигналов способна обеспечить более точное определение координат зон повышенного шумоизлучения по длине объекта.
Разумеется, отмеченные особенности и преимущества методики выполнения измерений с использованием протяженной гидроакустической системы требуют своего дальнейшего развития и совершенствования с обязательным решением задач метрологического характера.
Литература
1. Морской автономный измерительный комплекс. Сборник ИПФ РАН № ____. Н. Новгород, 2002. __ с.
2. http://www. acoustician. ru
3. Комплексное применение средств акустической защиты для снижения вибрации и шума корабельного оборудования. Санкт-Петербург: “Моринтех”, 2001. 240 с.
4. , Измерение двумерных диаграмм направленности протяженных излучателей в неоднородной среде. Сборник ИПФ РАН № ____. Н. Новгород, 2002. __ с
5. . Сборник ИПФ РАН № ____. Н. Новгород, 2002. __ с Стромковский
6. . Измерение характеристик рассеяния в области низких частот. Сборник ИПФ РАН № ____. Н. Новгород, 2002. __ с
7. . Измерения траектории тональных источников в мелком море. Сборник ИПФ РАН № ____. Н. Новгород, 2002. __ с.
8. Роберт Дж. Урик Основы гидроакустики. Л: Судостроение, 1978. 448 с.
9. , и др. Справочник по гидроакустике. Л: Судостроение, 1988. 552с.
10. , Обработка сигналов и изображений. М: “ДИАЛОГ—МИФИ”, 2000.416 с.
