

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Приложение 1
НОСИТЕЛИ, ИСПОЛЬЗУЕМЫЕ ДЛЯ ЗАПУСКА КОСМИЧЕСКИХ АППАРАТОВ СЕРИИ ЗЕНИТ
РН, используемые для запуска КА серии Зенит относятся к семейству носителей, созданных на основе двухступенчатой МБР Р-7 (разработана ОКБ в 1953-57гг.) и представленных на рис. П.1.
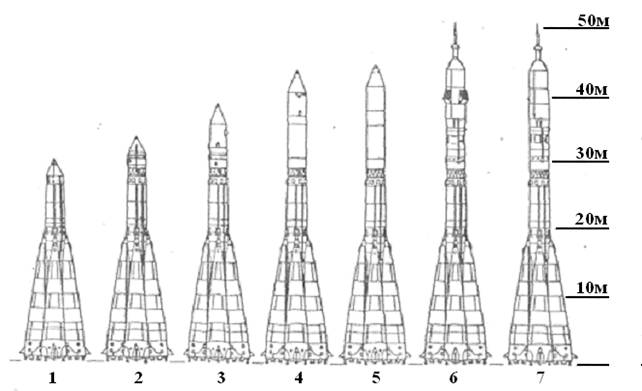
Рис. П.1 Семейство ракет-носителей Восток
1 – Спутник; 2 – Луна; 3 – Восток; 4 – Восход; 5 – Луна-Венера; 6 – Союз; 7 – Прогресс.
РН семейства Восток выполнены по пакетной схеме с параллельным отделением боковых ракетных блоков в конце работы первой ступени и поперечным отделением ракетного блока второй ступени от третей ступени по окончании ее работы. Четыре боковых блока (блоки Б, В, Г и Д) равномерно расположены вокруг центрального (блока А) и соединены с ним двумя поясами силовых связей: верхним, воспринимающим нагрузку в осевом и поперечном направлениях, и нижним, воспринимающим только поперечную нагрузку На первом этапе полета работают двигатели четырех боковых блоков и центрального, на втором - только двигатели центрального блока. 3 ступень (для РН Восток - блок Е, для РН Союз - блок И) установлена на центральном блоке. Разделение 2 и 3 ступени происходит по горячей схеме. РН на первом и втором этапах полета управляется путем отклонения рулевых камер, входящих в состав двигателей боковых и центрального блоков. На каждом боковом блоке имеются по две рулевые камеры, на центральном - четыре. Для управления полетом на 3 ступени используются четыре рулевых сопла. На боковых блоках установлены ЖРД РД-107, на центральном - РД-108. На боковых блоках в зоне хвостового отсека на специальных пилонах установлены воздушные рули, улучшающие управление РН при полете на первом этапе.
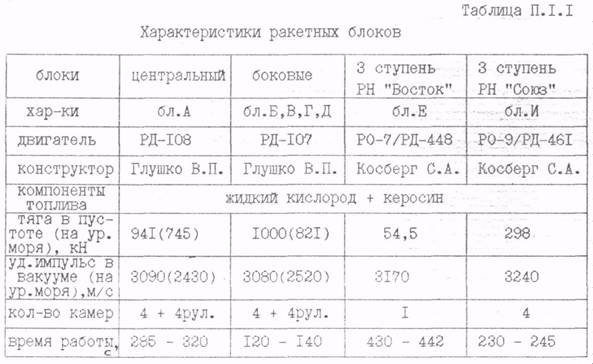
Основные характеристики блоков представлены в таблице П.1.1.
РН Восток (по классификации Министерства обороны США - SL-3) с 1962 по 1968 год применялась для запуска фоторазведывательных спутников первого поколения, год первого запуска - 1958г., космодром Байконур (Тюра-Там). С 1966 по 1983 гг. использовалась для выведения метеорологических спутников и спутников радиотехнической разведки. С 1984г. продолжает использоваться только для эпизодических запусков спутников дистанционного зондирования на солнечно-синхронные орбиты и в ближайшее время будет выведена из эксплуатации.
РН Союз (SL-4). Используется для выведения , Союз, Прогресс и КА серии Зенит. Год первого запуска - 1963. Используемые космодромы - Байконур, Плесецк. С 1963 по 1991 год осуществлено 963 успешных запуска, что делает Союз самой массовой РН в мире.
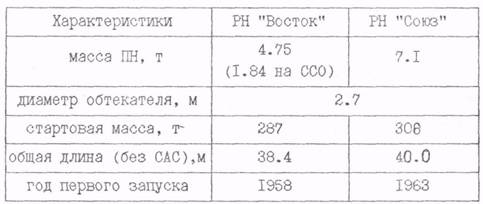
Основные характеристики ракет-носителей Восток и Союз приведены в таблице П.1.2.
1.2
Характеристики РН
Приложение 2
ИНФОРМАТИВНЫЕ СВОЙСТВА КОСМИЧЕСКИХ АППАРАТОВ ЗОНДИРОВАНИЯ
Под информативными свойствами КА понимают свойства, определяющие качество получаемых с помощью КА изображений зондируемых участков земной поверхности. На практике наиболее часто используются такие показатели качества изображения как разрешающая способность и линейное разрешение на местности.
Разрешающая способность изображения (R) определяется наибольшим значением частоты штрихов регулярной одномерной решетки - миры, при котором в фотоизображении эти штрихи еще могут быть различены (не сливаются).
Мира состоит из набора полей, каждое из которых представляет собой чередующийся набор светлых и темных полосок одинаковой ширины. Ширина полосок от поля к полю меняется. Разрешающая способность изображения определяется как максимальное число штрихов на единицу длины (число штрихов или линий на миллиметр), т. е. измеряется в лин./мм (мм-1). Показатель (R) используется для оценки информативных свойств как отдельных звеньев сквозного тракта формирования изображения, например объектива, фотопленки, так и системы объектив - фотопленка в целом. Важным преимуществом показателя разрешающая способность является его простой физический смысл, несложность методики измерения, а также учет свойств глаза как зрительного анализатора.
С показателем разрешающая способность тесно связан другой показатель - линейное разрешение на местности.. Этот показатель помимо разрешающей способности учитывает параметры аппаратуры зондирования и условия функционирования КА, а именно фокусное расстояние и параметры относительного расположения КА в зондируемых районах.
Линейное разрешение на местности (L) для частного случая зондирования подспутниковой точки определяется из соотношения
![]() ,
,
где
![]() - ширина штриха в изображении миры;
- ширина штриха в изображении миры;
H - высота полета;
f - фокусное расстояние объектива.
В общем случае
![]() ;
;
где D - расстояние от центра масс КА до точки пересечения оптической оси аппаратуры зондирования с поверхностью Земли.
![]() ;
;
где y - угол отклонения оптической оси от местной вертикали.
В некоторых случаях находит применение еще один показатель изображения, называемый добротностью системы. Добротность определяет предельно допустимое угловое разрежение системы и измеряется в радианах.
![]()
Чтобы более полно описать передаточные свойства системы используют характеристику, которая называется контраст миры. Контраст миры - количественная оценка распределения яркости в поле миры, определяемая из соотношения:
![]() ,
,
где
BMAX и BM1N ‑ яркости светлых и темных полос поля миры соответственно.
Величина kt принимает значение из диапазона (0, 1). Известно, что чем меньше контраст миры при прочих равных условиях, тем хуже разрешающая способность.
Помимо контраста kt различают контраст kt' изображения миры, который характеризует распределение освещенности в фокальной плоскости объектива (плоскости изображения):
![]()
где
EMAX и EM1N - освещенности изображения соответственно для светлых и темных полос поля миры.
Изображение поля мири (или какого-либо объекта) отличается от оригинала двумя факторами:
- амплитуда колебаний освещенности в изображении меньше, чем в самой мире (изменение амплитуды);
- вне оптической оси изображение миры может не совпадать с его положением, рассчитанным по законам оптики идеальной системы (изменение фазы);
Для более полного описания этих факторов используется частотная передаточная функция и ее составляющая, называемая функцией передачи модуляции или частотно-контрастной характеристикой.
Приложение 3
КОНСТРУКТИВНАЯ СХЕМА РАЗМЕЩЕНИЯ ОСНОВНЫХ АГРЕГАТОВ СИСТЕМЫ ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ КОСМИЧЕСКИХ АППАРАТОВ ТИПА ЗЕНИТ
Конструктивная схема размещения основных агрегатов системы ориентации и стабилизации космических аппаратов типа Зенит представлена на рисунке П.2:
а) приборный отсек;
б) размещение системы стабилизации;
в) размещение системы ориентации.
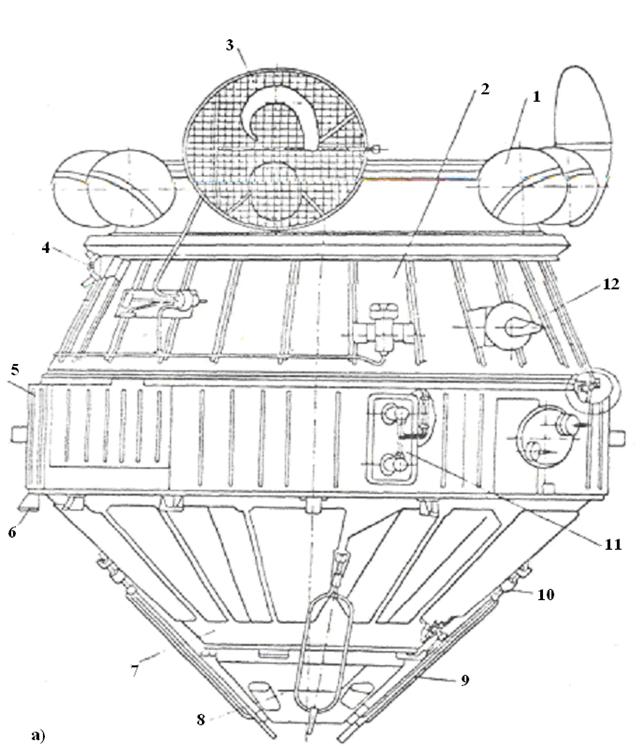
Рис. П.2.
1 – шаровый баллон; 2 – конус верхний; 3, 9, 12 – антенна; 4 – кронштейн; 5 – вставка цилиндрическая; 6 – опора; 7 – конус нижний; 8 – установка ТДУ; 10 – жалюзи; 11 – монтаж кабелей и установка датчиков.
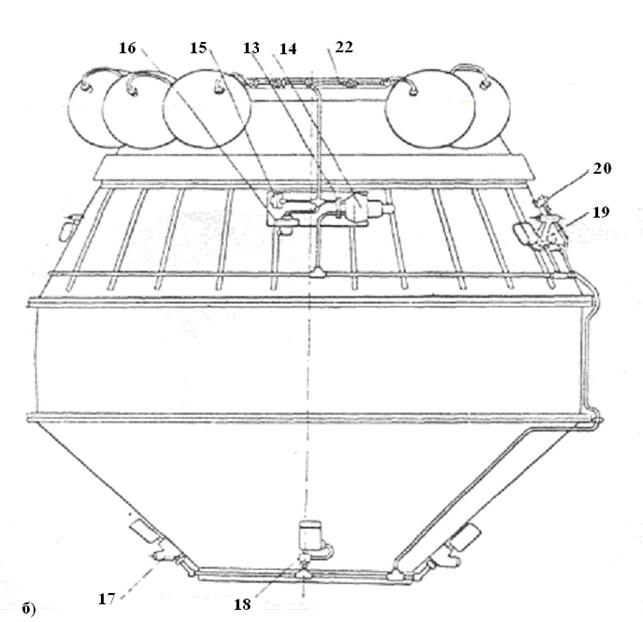
Рис. П.2.
1 – шаровый баллон; 13 – перекрывной ЭПК; 14 – редуктор; 15 – заправочный клапан; 17 – сопл управления по тангажу; 18 – сопло управления по рысканию; 19 – сопло управления по крену; 20 – датчики высокого давления; 22 – коллектор.
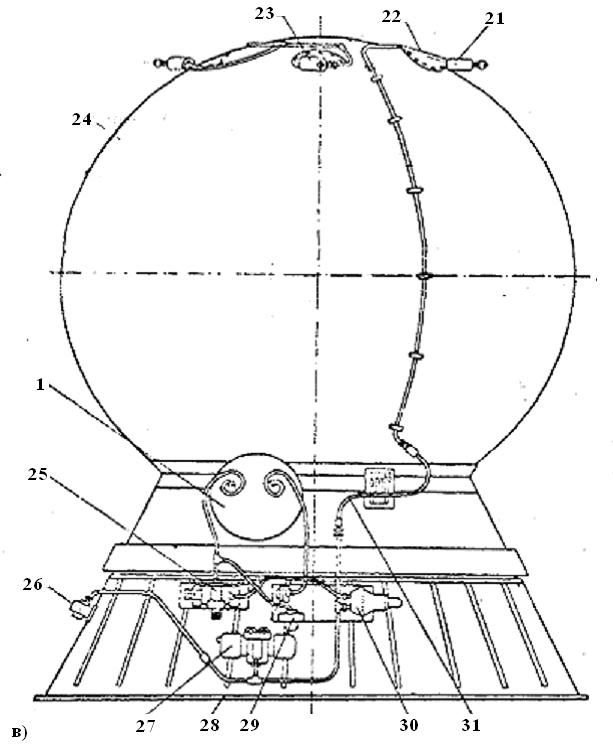
Рис. П.2.
1 – шаровый баллон; 21 – сопло управления по тангажу; 22 – коллектор; 23 – сопло управления по рысканию; 24 – корпус спускаемого аппарата; 25 – электропневмоклапан; 26 – датчик низкого давления; 27 – сопло управления по крену; 28 – заправочный клапан; 29 – датчики высокого давления; 30 – редуктор; 31 – шланг.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
