Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Содержание
Введение. 3
1. Особенность движения состава. 4
2. Виды динамических процессов. 4
3. Расчетные схемы процессов при движении. 6
4. Математические модели динамики подвижного состава на железнодорожном транспорте. 7
5. Выбор оптимальных параметров. Методы устранения. 18
Заключение. 20
Список использованных источников. 21
Введение
Основной путь повышения провозной и пропускной, способностей железных дорог – увеличение веса и скоростей движения поездов. Однако, высокие скорости движения требуют в свою очередь улучшения динамических качеств локомотивов и вагонов, а также предъявляют жесткие требования к нормам содержания верхнего строения пути, так как с ростом скорости увеличиваются действующие на путь в вертикальной и горизонтальной плоскостях силы.
Большие направляющие усилия, действующие на экипаж в кривых участках пути, являются главным препятствием, ограничивающим скорость движения поездов. Значит, установление максимально допустимых с точки зрения безопасности движения скоростей прохождения, поездом кривых настоятельное требование сегодняшнего дня. Такая задача уже решалась многими исследователями, но при этом не учитывались неравноупругость пути по длине рельсового звена, стохастический характер изменения возвышения наружного рельса над внутренним и зазора в рельсовой колее.
Следовательно, задача динамического взаимодействия подвижного состава и неравноупругого в плане пути с учетом стохастического характера изменения геометрических характеристик рельсовой колеи в кривой является актуальной. Неравноупругость пути в горизонтальной плоскости – это специфический возмущающий фактор, способный либо усиливать, либо гасить другие внешние воздействия, что оказывает существенное влияние на процесс износа гребней бандажей колесных пар в точках контакта с рельсами, поэтому ее нельзя не учитывать в математических моделях, описывающих колебания экипажей в поперечном направлении.
Цель работы: рассмотреть математическое моделирование динамики подвижного состава на железнодорожном транспорте
1. Особенность движения состава
Взаимодействие пути и подвижного состава – предмет изучения специальной научной дисциплины, исследующей механические процессы, происходящие в подвижном составе и в железнодорожном пути при воздействии их друг на друга, при этом подвижной состав и железнодорожный путь рассматриваются элементы единой механической системы («колесо-рельс»). Исследование данного взаимодействия является основополагающим физическим процессом при движении вагонов, локомотивов и поездов по железным дорогам, так как во многом определяет такие важнейшие показатели, как ширина колеи, нагрузка на ось, статическая нагрузка вагонов, масса и скорость движения составов, а также безопасность движения поездов. Изучают динамические силы, действующие между рельсами и колёсами экипажей, устойчивость движения экипажей и их колебания, движения экипажей в кривых, устойчивость экипажей на пути и устойчивость пути при движении экипажа, деформации и механические напряжения, которые возникают во взаимодействующих конструкциях.
2. Виды динамических процессов
Динамическая система представляет собой математическую модель некоторого объекта, процесса или явления.
Динамическая система также может быть представлена как система, обладающая состоянием. При таком подходе, динамическая система описывает (в целом) динамику некоторого процесса, а именно: процесс перехода системы из одного состояния в другое. Фазовое пространство системы – совокупность всех допустимых состояний динамической системы. Таким образом, динамическая система характеризуется своим начальным состоянием и законом, по которому система переходит из начального состояния в другое.
Различают системы с дискретным временем и системы с непрерывным временем.
В системах с дискретным временем, которые традиционно называются каскадами, поведение системы (или, что то же самое, траектория системы в фазовом пространстве) описывается последовательностью состояний. В системах с непрерывным временем, которые традиционно называются потоками, состояние системы определено для каждого момента времени на вещественной или комплексной оси. Каскады и потоки являются основным предметом рассмотрения в символической и топологической динамике.
Динамическая система (как с дискретным, так и с непрерывным временем) часто описывается автономной системой дифференциальных уравнений, заданной в некоторой области и удовлетворяющей там условиям теоремы существования и единственности решения дифференциального уравнения. Положениям равновесия динамической системы соответствуют особые точки дифференциального уравнения, а замкнутые фазовые кривые – его периодическим решениям.
Основное содержание теории динамических систем – это исследование кривых, определяемых дифференциальными уравнениями. Сюда входит разбиение фазового пространства на траектории и исследование предельного поведения этих траекторий: поиск и классификация положений равновесия, выделение притягивающих (аттракторы) и отталкивающих (репеллеры) множеств (многообразий). Важнейшие понятия теории динамических систем – устойчивость (способность системы сколь угодно долго оставаться около положения равновесия или на заданном многообразии) и грубость (сохранение свойств при малых изменениях структуры динамической системы; «грубая система – это такая, качественный характер движений которой не меняется при достаточно малом изменении параметров»[1]).
Привлечение вероятностно-статистических представлений в эргодической теории динамических систем приводит к понятию динамической системы с инвариантной мерой.
Современная теория динамических систем является собирательным названием для исследований, где широко используются и эффективным образом сочетаются методы из различных разделов математики: топологии и алгебры, алгебраической геометрии и теории меры, теории дифференциальных форм, теории особенностей и катастроф.
Весьма тесно примыкает к таким современным разделам естествознания как неравновесная термодинамика, теория динамического хаоса, синергетика.
3. Расчетные схемы процессов при движении
При движении подвижного состава рельс прогибается и передает нагрузку на подрельсовое основание. Основными параметрами, определяющими величину прогиба рельса, являются осевая нагрузка, скорость движения, модуль упругости рельсовой стали и параметры подрельсового основания.
Для повышения точности расчета на прочность необходимо принимать во внимание как упругие и диссипативные, так и инерционные свойства подрельсового основания.
Рассмотрим рельс, лежащий на сплошном упругом основании, несущий произвольную внешнюю нагрузку P(x).
В данном случае рельс может быть рассмотрен как балка на упругом основании. Так называется балка, опирающаяся по всей своей длине (рисунок 1) на упругое основание, оказывающее в каждой точке на балку реакцию, пропорциональную у – прогибу балки в этой точке. Коэффициент пропорциональности обозначается буквой U.
Введение предположения о пропорциональности реакций прогибу является приближением, хотя и достаточно близким к действительным условиям.
Рисунок 1 – Расчетная схема балки на упругом основании
4. Математические модели динамики подвижного состава на железнодорожном транспорте
Предложение ввести в расчет коэффициент пропорциональности U, именуемый «коэффициентом постели», было впервые сделано русским академиком Николаем Ивановичем Фуссом в 1801 году. Принимая это предположение, получаем, что интенсивность реакции основания в каждой точке сила равна Uy и измеряется в единицах силы и длины; размерность коэффициента U при этом будет сила и квадрат длины. Будем считать, что основание оказывает реакцию при прогибах балки как вниз, так и вверх.
Статически неопределимой такая балка будет потому, что условие статики– сумма нагрузок равна всей реакции основания – не дает возможности установить распределение этой реакции по длине балки, а значит, вычислить изгибающие моменты и поперечные силы.
Интенсивность реакции в каждой точке связана с прогибами балки. Поэтому для решения задачи необходимо найти сначала уравнение изогнутой оси ![]() , а уже затем формулы для вычисления изгибающего момента и поперечной силы. Ход решения оказывается обратным обычному.
, а уже затем формулы для вычисления изгибающего момента и поперечной силы. Ход решения оказывается обратным обычному.
Найдем уравнение изогнутой оси для балки постоянного сечения, лежащей на упругом основании и нагруженной сосредоточенными силами ![]() ... (рисунок 1). Начало координат возьмем в любой точке, ось х направим вправо, ось у вертикально вверх. Направление нагрузок вверх будем считать положительным. Напишем обычное дифференциальное уравнение изгиба
... (рисунок 1). Начало координат возьмем в любой точке, ось х направим вправо, ось у вертикально вверх. Направление нагрузок вверх будем считать положительным. Напишем обычное дифференциальное уравнение изгиба
![]()
Так как М(х) нам неизвестен, то постараемся связать прогибы непосредственно с нагрузкой, для этого дифференцируем дважды предыдущее уравнение:
![]() , (1)
, (1)
где q(x)–интенсивность сплошной нагрузки, действующей на балку в сечении с абсциссой х.
Сплошной нагрузкой для нашей балки является лишь реакция упругого основания. Интенсивность ей пропорциональна прогибам; эта нагрузка направлена вверх, т. е. положительна, когда прогибы идут вниз, т. е. отрицательны, и наоборот. Таким образом, эта нагрузка имеет знак, обратный знаку прогибов:
![]()
Тогда
![]() (2)
(2)
![]() (3)
(3)
Если обозначить ![]() , то общий интеграл уравнения (3) имеет вид:
, то общий интеграл уравнения (3) имеет вид:
![]() (4)
(4)
Постоянные А, В, С, D должны быть определены в каждом частном случае нагрузки и длины балки. Величина ![]() имеет измерение обратное длине.
имеет измерение обратное длине.
Наиболее просто решается задача об изгибе бесконечно длинной балки, нагруженной одной сосредоточенной силой (Рисунок 2).
|
Рисунок 2 – Расчетная схема балки бесконечной длины.
Начало координат расположим в точке приложения силы Р. Определим постоянные А, В, С и D. Так как вся реакция основания, равная силе Р должна быть конечной величиной, то прогибы балки в точках, бесконечно удаленных ![]() от точки приложения силы, должны обращаться в нуль:
от точки приложения силы, должны обращаться в нуль:
![]() (5)
(5)
При бесконечно больших значениях х два вторых слагаемых в правой части формулы (4) обращаются в нуль благодаря множителю![]() , два же первых могут обратиться в нуль лишь при
, два же первых могут обратиться в нуль лишь при ![]() и
и ![]()
таким образом,
![]() (6)
(6)
Далее, по симметрии нагрузки и реакции основания, касательная к изогнутой оси в точке приложения силы должна идти параллельно оси абсцисс:
![]() (7)
(7)
Дифференцируя (6), получаем:
![]() .
.
Подставляя в это выражение ![]() и приравнивая результат нулю, находим:
и приравнивая результат нулю, находим:
![]() или
или ![]() .
.
Таким образом, уравнения будут:
![]() (8)
(8)
![]() (9)
(9)
Для определения последней постоянной С имеем еще одно уравнение: нам известна величина поперечной силы в начале координат.
Разрезав балку сечением в точке О справа от силы Р и рассматривая правую часть балки, видим, что поперечная сита в этом сечении равна реакции основания, действующей на правую половину балки со знаком минус; так как реакция направлена вверх (для правой половины) и вся реакция основания равна Р, значит, поперечная сила в сечении при ![]() равна
равна
![]()
Но, с другой стороны
![]() (10)
(10)
Таким образом,
 (11)
(11)
Вычисляем, пользуясь (8), ![]() и
и ![]() :
:
![]() (12)
(12)
![]() (13)
(13)
Подставляя (13) в (11) и приравнивая х нулю, получаем:
![]() и
и ![]()
Теперь значения у и ее производных получают вид
![]()
![]()
![]()
![]()
Таким образом, напряженное состояние и деформации балки на упругом основании всецело определяются нагрузкой и коэффициентом ![]() , зависящим от соотношения жесткостей балки и упругого основания.
, зависящим от соотношения жесткостей балки и упругого основания.
В работе [2] исследовано взаимодействия пути одиночной колесной пары (одиночной вертикальной силы). В реальных условиях железнодорожный путь испытывает воздействие экипажа (тележки), состоящего из двух и более колес. Поэтому при исследовании воздействия экипажа на путь необходимо учитывать это условие.
В [5] приведена методика определения прогибов рельса под действием группы сил, движущихся с одинаковой скоростью, с помощью частотных характеристик.
Пусть на железнодорожный путь действует многоосный экипаж. Общее решение уравнения вида (6) с граничными условиями (5,7,11) будем искать в виде алгебраической суммы:
![]() , (14)
, (14)
где у1 - прогиб рельса под первым колесом;
у2 - то же, под вторым колесом;
уk - то же, под k-м колесом.
Прогиб рельса соответственно под первым, вторым и k-м колесом, определяется по следующим формулам:
![]() (15)
(15)
![]() (16)
(16)
![]() (17)
(17)
Тогда общий прогиб рельса под действием многоосного экипажа будет иметь вид:
 . (18)
. (18)
При движении по пути группы сил Рi(x, t) (i=1,2, …k), произвольно изменяющихся по времени и имеющих фиксированные абсциссы х в подвижной системе координат, прогиб рельса в любой точке в следствие линейности рассматриваемой задачи, может быть представлен в виде суммы прогибов, вызываемых действием каждой из n - сил в этой точке.
Уравнение (3) не учитывает динамических параметров пути: ускорение колеблющихся масс пути; коэффициента неупругого сопротивления пути и упругого отпора.
Для небольших скоростей движения подвижного состава нет необходимости в уравнении колебания рельса учитывать неупругие сопротивления. Однако при высоких скоростях и более тяжелом типе верхнего строения возникает необходимость их учета. Силы неупругого вертикального отпора, развивающиеся под нагрузкой, могут проявляться как силы трения, независящие от вертикальных нагрузок, и как силы, представляющие собой вертикальную составляющую скоростей колебаний. При этом расчетная схема прогиба рельса под многоосным экипажем будет иметь вид, представленный на рисунке 3.
Рисунок 3 – Схема воздействия многоосного экипажа на путь
Также необходимо учитывать силу инерции вращения сечения балки. С учетом выше названных параметров пути уравнение колебания рельса при воздействии группы вертикальных сил будет иметь следующий вид:
 , (19)
, (19)
где EI - изгибная жесткость рельсовой стали;
y - прогиб рельса;
x - абсцисса текущего сечения рельса, отсчитываемая от некоторого неподвижного начала координат;
m - приведенная масса;
t - время;
f - коэффициент неупругого сопротивления.
Таким образом, получено уравнение прогиба рельса в общем виде для определения суммарного прогиба рельса под действием многоосного экипажа.
При составлении дифференциальных уравнений собственных колебаний вагона используются общие сведения из теоретической механики (раздел “Динамика”). На основе использования принципа Даламбера получены дифференциальные уравнения собственных колебаний подпрыгивания, галопирования и боковой качки кузова вагона.
Величины, необходимые для выполнения расчетов, приведены в исходных данных настоящего задания. Следует обратить внимание на то, что в этих расчетах вес кузова вагона определяют по формуле
G = Gтар + aGгр - 2G
где Gтар - тара вагона;
Gгр - грузоподъемность вагона;
a - доля использования грузоподъемности вагона;
Gтел - вес тележки.
Круговые частоты собственных колебаний вагона Vподпр, Vгал, Vбок. кач определяют по формулам:
 , (21)
, (21)
 , (22)
, (22)
 , (23)
, (23)
По круговым частотам следует определить соответствующие им линейные частоты (см. формулу 24)
 , (24)
, (24)
где ![]() - линейная частота колебаний.
- линейная частота колебаний.
По исходным данным рассчитывают коэффициент сопротивления вязкого трения гидравлического гасителя колебаний β по формуле
 . (25)
. (25)
Массу m в формуле (6) определяют по формуле
![]() .
.
Затем для гасителей колебаний с постоянной силой сухого трения необходимо определить величину этой силы трения F=Nm, используя формулу (26), а также по формуле (27),
 , (26)
, (26)
где N=const - нажатие в трущейся паре,
m - коэффициент трения материалов этой пары.
 . (27)
. (27)
Для гасителя с линейно зависящим от прогиба нажатием трущихся поверхностей элементов фрикционного аппарата следует определить параметр трения f=km, используя формулу (28) и условие коэффициента вязкого сопротивления по формуле (29). В этой формуле с представляет собой общую жесткость всех рессор вагона. Для гидравлических гасителей расчет заканчивается определением величины b.
 , (28)
, (28)
 , (29)
, (29)
Проверку рессорного подвешивания на отсутствие “валкости” кузова следует производить на основе формул (30) и (31). Определяют высоту метацентра вагона и достаточность превышения высоты метацентра над положением центра тяжести вагона.
 , (30)
, (30)
 . (31)
. (31)
В четвертом разделе первой части задания выводят дифференциальное уравнение вынужденных колебаний простейшей системы. Решение дифференциального уравнения является аналитическим выражением процесса вынужденных колебаний подпрыгивания вагона при движении его по регулярным неровностям вида z=h cos w t (формула (32).
Как известно это решение имеет вид
 , (32)
, (32)
где  ;
;
u - скорость движения вагона;
l н - длина периода неровностей;
2h - высота неровности;
V - круговая частота собственных колебаний;
Ф1 = cos wt.
Для колеса вагона номер i (считая первым колесо, идущее впереди) возмущающие функции имеют вид
 ,
,
где li - расстояние от первого до i-го колеса.
Тогда амплитуда вынужденных колебаний подпрыгивания кузова вагона будет иметь вид
 . (33)
. (33)
Следует получить выражение для z с численными параметры для заданного вагона при его движении. Построить график уравнения (14) при 0 ≤ t ≤ 2c.
5. Выбор оптимальных параметров. Методы устранения
При взаимодействии подвижного состава и пути возникают сложные динамические процессы, которые оказывают негативное влияние, как на элементы верхнего строения пути, так и детали подвижного состава. Кроме того, в последнее время актуальна проблема неблагоприятного воздействия шума и вибраций на людей, находящиеся вблизи железной дороги сооружения, а так же на всю систему «путь - подвижной состав».
Разработана широкополосная шпала – демпфер. Получена физическая модель системы «путь – подвижной состав» на основе разработанной методики комплексного моделирования с улучшенной прогнозирующей способностью механических свойств материалов, а так же инерционных, жесткостных и демпфирующих параметров механической системы.
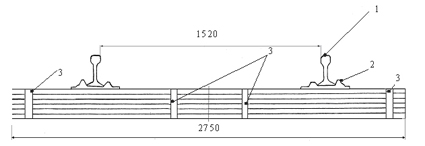
1 – рельс, 2 – накладка КД-4, 3 – металлический хомут
Рисунок 4 – Конструкция шпалы – демпфера
Конструкция шпалы – демпфера представляет собой многослойную систему, состоящую из пяти деревянных брусьев, между которыми расположена специальная демпфирующая резина. Слои имеют предварительное напряжение, а шпала затянута стальными хомутами. За счет внешнего трения в слоях и внутреннего трения в упругодемпфирующем материале данная конструкция имеет намного выше демпфирующие свойства по сравнению с обычной монолитной шпалой. Суммарная жесткость резиновых листов разная и подбирается в зависимости от частот спектра внешних возмущающих воздействий. Согласно данным модельных испытаний применение шпалы-демпфера позволит на 25-30% снизить уровень структурного шума. Применение шпалы – демпфера позволит значительно увеличить общую долговечность системы “путь – подвижной состав”, увеличить межремонтные сроки, снизить общие эксплуатационные затраты. Предложенная конструкция шпалы должна найти широкое применение при укладке верхнего строения железнодорожного пути на монолитное основание.
Для локомотива снижение уровня динамических нагрузок в контакте колеса и рельса позволяет повысить его тяговые свойства. Поэтому применение шпалы-демпфера является одним из способов повышения тяговых качеств локомотивов и одним из перспективных шагов на пути создания динамически благоприятных условий взаимодействия пути и подвижного состава.
Заключение
При взаимодействии подвижного состава и пути возникают сложные динамические процессы, которые оказывают негативное влияние, как на элементы верхнего строения пути, так и детали подвижного состава. Кроме того, в последнее время актуальна проблема неблагоприятного воздействия шума и вибраций на людей, находящиеся вблизи железной дороги сооружения, а так же на всю систему «путь - подвижной состав».
Для локомотива снижение уровня динамических нагрузок в контакте колеса и рельса позволяет повысить его тяговые свойства. Поэтому применение шпалы-демпфера является одним из способов повышения тяговых качеств локомотивов и одним из перспективных шагов на пути создания динамически благоприятных условий взаимодействия пути и подвижного состава.
Для небольших скоростей движения подвижного состава нет необходимости в уравнении колебания рельса учитывать неупругие сопротивления. Однако при высоких скоростях и более тяжелом типе верхнего строения возникает необходимость их учета. Силы неупругого вертикального отпора, развивающиеся под нагрузкой, могут проявляться как силы трения, независящие от вертикальных нагрузок, и как силы, представляющие собой вертикальную составляющую скоростей колебаний. При этом расчетная схема прогиба рельса под многоосным экипажем будет иметь вид, представленный на рисунке 3.
Список использованных источников
1. С., А., Пя Д. Р. Исследование методик расчета деформации рельса под действием подвижного состава. – Режим доступа: http://www. /10_NPE_2008/Tecnic/30213.doc. htm [дата обращения 03.02.2014].
2. Анализ исследований характеристик упругости пути в вертикальной и горизонтальной плоскостях // Материалы междунар. науч.-практ. конф. «Эффективные инструменты современной науки - 2010» / – Чехия, 2010, – C. 24 - 27.
3. Анализ исследований характеристик упругости пути в вертикальной и горизонтальной плоскостях // Материалы междунар. науч.-практ. конф. «Эффективные инструменты современной науки - 2010» / – Чехия, 2010. – Т.1. – C. 24 - 27.
4. К. Совершенствование модели расчета железнодорожного пути на прочность. Диссертации на соискание ученой степени к. т.н. Алматы, 2012. С.167.
5. Я. Некоторые особенности воздействия на путь подвижной нагрузки. Вестник ВНИИЖТа, 2010. № 3. С. 28-32
 Основные порталы (построено редакторами)
Основные порталы (построено редакторами)