Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
{
counter=0; /* Сброс счетчика */
state=0; /* переход в режим ожидания */
Light=0; /* выключение света */
}
end;
}
end;
В более сложных алгоритмах выигрыш по времени работы программы может оказаться весьма существенным.
4. ВОПРОСЫ ОТЛАДКИ УПРАВЛЯЮЩИХ ПРОГРАММ
4.1. Общие замечания
По оценкам специалистов время на отладку программы составляет более 70% процентов от общего времени разработки. Задачей отладки является не только выявление синтаксических и логических ошибок, но и оптимизация программы, исключение неиспользуемых ветвей и т. п.
В общем случае отладка включает в себя следующие этапы:
— выявление синтаксических ошибок в тексте программы;
— проверка работоспособности отдельных алгоритмов;
— отладка рабочей программы на математической модели объекта;
— отладка на физическом эмуляторе объекта;
— окончательная отладка и тестирование на объекте с привлечением обслуживающего персонала.
Нарушение указанного порядка, как правило, приводит к дополнительным временным и финансовым затратам.
Данный порядок проверки работоспособности строится на принципе «от частного к общему». Сначала выполняется проверка работоспособности отдельных алгоритмов, составляющих рабочую программу, затем связок этих алгоритмов между собой и т. д. Использование метода модульного программирования позволяет максимально упростить эти этапы.
4.2. Отладка программы с помощью математической модели объекта управления
Задачей отладки программы на математической модели является проверка правильности работы алгоритмов отдельных регуляторов и системы управления в целом. На этом этапе проверяется аппаратно независимая часть рабочей программы. Выполняться проверка может как на персональном компьютере (чаще) с использованием эмуляторов различной степени сложности, так и на разрабатываемой аппаратной части.
Отладка начинается с проверки работоспособности алгоритмов отдельных регуляторов. При этом рассчитывается ряд тестовых наборов, содержащих комбинации входных и выходных переменных из всего рабочего диапазона. Далее проверка выполняется с использованием фрагмента модели объекта управления. Так для регулятора тока якоря таким фрагментом является модель цепи якоря ДПТ.
Отладка систем подчиненного регулирования ведется от младших контуров к старшим с последовательным усложнением модели объекта.
4.3. Отладочный комплекс для пакета MATLAB
Получивший широкое распространение для задач моделирования MATLAB может также быть использован и для задачи отладки управляющей программы. Для этого следует воспользоваться системой моделирования Simulink, а также освоить прием составления пользовательских блоков с помощью механизма S-функций.
Порядок подготовки отладочного комплекса следующий. Сначала создается модель объекта, которая должна отвечать необходимому уровню адекватности. Модель может содержать как непрерывные, так и импульсные элементы. Далее пишется программа управляющей части, причем может быть использован как язык системы MATLAB, так и язык C, что более удобно.
Разработанная программа встраивается в шаблон S-функций. Сама S-функция должна быть настроена как дискретная система с желаемым периодом квантования. Инструкции по формированию S-функций приводятся в справочной системе MATLAB. Пример модели системы, иллюстрирующий данную методику отладки приведен на рис. 4.1.
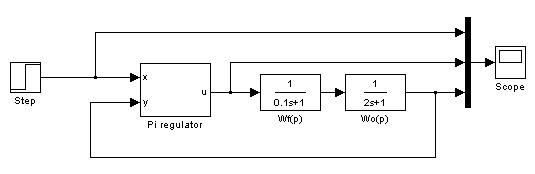
Рис.4.1. Модель Simulink для отладки алгоритма ПИ-регулятора
На рисунке представлен отладочный комплекс для проверки ПИ-регулятора, объектом управления для которого служит фильтр Wo(p). Также в системе присутствует полосовой фильтр Wf(p). Подсистема «Pi regulator» содержит блок S-функции, содержащей текст программы регулятора. Текст программы полностью соответствует тексту, приведенному в пункте 3.1.
Приведенная выше модель позволяет легко проверить работу программы в динамическом режиме для заданного набора управляющих и возмущающих воздействий с просмотром всех необходимых сигналов. Если требуется просматривать состояние промежуточных переменных, в S-функции целесообразно предусмотреть дополнительный выход для подключения осциллографа Scope.
Данный способ отладки удобен еще и тем, что является аппаратно независимым. В этом варианте все основные алгоритмы могут быть проверены даже при отсутствии микропроцессорного комплекта, что существенно ускоряет процесс разработки новых устройств.
4.4. Отладка программы на физической модели объекта
Задачей отладки рабочей программы на физической модели является проверка правильности выбора параметров датчиков (коэффициентов передачи, времен преобразования), правильности работы драйверов периферийных устройств, согласованности временных интервалов, выявление особенностей поведения системы в условиях помех и шумов.
В простейшем случае модель объекта собирается из наборов кнопок, переключателей, потенциометров, светодиодов и т. п. На этом этапе проверяются, прежде всего, драйверы управляющей программы.
Более сложная проверка выполняется с применением имитатора объекта управления. Для проверки, например, алгоритмов автоматики логического контроллера удобно использовать второй логический контроллер, несущий в себе программу–эмулятор объекта управления. Очевидно, что чем больше особенностей объекта учтено в программе–эмуляторе, тем качественнее может быть выполнена отладка.
4.5. Окончательная отладка рабочей программы
Окончательная отладка рабочей программы выполняется собственно на объекте. Ее задачей является проверка и параметрирование программы с учетом реальных физических особенностей объекта управления. Выполняется контроль правильности подключения микропроцессорной системы. По возможности первые включения производят без подачи напряжения на силовые элементы.
Далее выполняется проверка основных режимов работы системы. В обязательном порядке имитируются аварийные ситуации с макимально возможным приближением к реальным условиям.
Привлечение обслуживающего объект персонала позволяет скорректировать процедуры человеко-машинного интерфейса, учесть недокументированные особенности производства.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. А. Цифровые автоматические системы / Главная редакция физико-математической литературы. М.: Наука, 1976.
2. А., П. Теория систем автоматического регулирования. М.: Наука, 1975.
3. В. Проектирование цифровой системы управления частотно-регулируемым асинхронным электроприводом. Екатеринбург: ГОУ ВПО УГТУ-УПИ, 2004.
4. Методы синтеза микропроцессорных систем автоматического управления электроприводами: методическое руководство к курсовому и дипломному проектированию / З. Ш. Ишматов, Е. Г. Казаков, А. В. Кириллов Екатеринбург: УГТУ, 2000.
5. А., А. Цифровые фильтры (анализ, синтез, реализация с использованием ЭВМ). М.: Связь, 1979.
6. Микропроцессорные системы автоматического управления / Под общ. ред. В. А. Бесекерского. Л.: Машиностроение, 1988.
ПРИЛОЖЕНИЕ 1
Пример рабочей программы. Упрощенная САР ДПТ
Рабочая программа состоит из трех функций: функции формирования констант, функции инициализации и функции расчета регуляторов. Внимание! MATLAB различает строчные и прописные буквы в именах переменных.
/* Процедура формирования констант */
reg_const()
{
Kw=2; /* коэффициент усиления регулятора скорости */
Ki=3; /* коэффициент усиления регулятора тока */
Ti=4; /* постоянная времени регулятора тока */
}
/* Процедура инициализации регуляторов */
reg_init()
{
/* Инициализация глобальных переменных */
w=0; /* скорость двигателя */
i=0; /* ток якоря */
u=0; /* напряжение */
/* Инициализация переменных */
wz=0; /* заданная скорость */
ew=0; /* ошибка по скорости */
iz=0; /* заданный ток */
ei=0; /* ошибка по току */
urt=0; /* выход регулятора тока */
urt_i=0; /* выход РТ интегральная часть */
urt_p=0; /* выход РТ пропорциональная часть */
}
/*---------------------------------------------------------------*/
/* Процедура выполнения регуляторов */
reg_program()
{
/*---------------------------------------------------------------*/
/* Внешняя функция чтения датчиков */
read_encoders();
/*---------------------------------------------------------------*/
/* П-регулятор скорости */
ew=wz-w;
iz=Kw*ew;
if (iz>2)
iz=2;
end;
if (iz<-2)
iz=-2;
end;
/*---------------------------------------------------------------*/
/* ПИ-регулятор тока */
ei=iz-i;
urt_p=Krt*ei;
urt_i=urt_i+ei/Trt;
if (urt_i>1)
urt_i =1;
end;
if (urt_i<-1)
urt_i=-1;
end;
urt=urt_i+urt_p
if (urt>1)
urt =1;
end;
if (urt<-1)
urt=-1;
end;
/*---------------------------------------------------------------*/
/* Формирование управления на СИФУ */
/*---------------------------------------------------------------*/
u=urt;
}
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ.. 3
1. ОБЩИЕ ПОЛОЖЕНИЯ. ОСОБЕННОСТИ РАЗРАБОТКИ УПРАВЛЯЮЩИХ ПРОГРАММ... 3
2. ПРИНЦИПЫ РАЗРАБОТКИ ПРОГРАММ РЕАЛЬНОГО ВРЕМЕНИ 5
2.1. Этапы разработки управляющей программы реального времени 5
2.2. Комплекс для разработки программного обеспечения. 5
2.3. Типовая структура управляющей программы.. 6
2.4. Распределение времени в микропроцессорной системе управления 8
2.5. Обработка прерываний. 8
2.6. Выбор периода квантования. 9
2.7. Типовая структура программы САР. 10
3. ПРОГРАММИРОВАНИЕ ТИПОВЫХ АЛГОРИТМОВ.. 11
3.1. Программирование типовых звеньев. 11
3.1.1. Усилительное звено. 12
3.1.2. Сумматор. 12
3.1.3. Интегратор. 12
3.1.4. Дифференцирующее звено. 13
3.1.5. ПИ-регулятор. 13
3.1.6. Фильтр первого порядка. 14
3.2. Программирование нелинейных элементов. 15
3.3. Программирование циклических алгоритмов. 16
4. ВОПРОСЫ ОТЛАДКИ УПРАВЛЯЮЩИХ ПРОГРАММ... 17
4.1. Общие замечания. 17
4.2. Отладка программы с помощью математической модели объекта управления 18
4.3. Отладочный комплекс для пакета MATLAB.. 18
4.4. Отладка программы на физической модели объекта. 19
4.5. Окончательная отладка рабочей программы.. 20
БИБЛИОГРАФИЧЕСКИЙ СПИСОК.. 20
ПРИЛОЖЕНИ 1. 20
ПРОГРАММИРОВАНИЕ МИКРОПРОЦЕССОРНЫХ СИСТЕМ УПРАВЛЕНИЯ
Составители Костылев Алексей Васильевич
Степанюк Дмитрий Павлович
Редактор И. В. Коршунова
Компьютерная верстка А. В. Костылева
ИД г.
Подписано в печать | Формат | 60х40 1/16 | |
Бумага писчая | Плоская печать | Усл. печ. л. | |
Уч. – изд. л. | Тираж | Заказ | Цена “С” |
Редакционно-издательский отдел ГОУ ВПО УГТУ-УПИ
620002, Екатеринбург, ул. Мира, 19

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
 Основные порталы (построено редакторами)
Основные порталы (построено редакторами)