Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
РОСЖЕЛДОР
Государственное образовательное учреждение
высшего профессионального образования
«Ростовский государственный университет путей сообщения»
(РГУПС)
З. Г. Гиоев
Исследование вибрационных процессов одноступенчатого зубчатого редуктора с разработкой методики по определению параметров вибрации с помощью ЭВМ
Методические указания к лабораторным работам
Ростов-на-Дону
2004
УДК 629.423.3
Г.
Исследование вибрационных процессов одноступенчатого зубчатого редуктора с разработкой методики по определению параметров вибрации с помощью ЭВМ: Методические указания к лабораторным работам. − Ростов н/Д: Рост. гос. ун-т путей сообщения, 2004.− 20 с.
В данном методическом указании приводятся краткие теоретические сведения по способу создания собственной корпусной вибрации зубчатого редуктора, даётся описание лабораторной установки, программа и методика выполнения работы, структура отчёта, контрольные вопросы.
Предназначена для студентов специальности 10.08.01. – «Электромеха-ника ж.-д. транспорта», изучающих курс «Тяговые электрические машины и привод».
Табл. 1. Ил. 15. Библиогр.: 6 назв.
Рецензент: д-р. техн. наук, проф. А. С. Бочев (РГУПС).
Учебное издание
Гиоев Заурбек Георгиевич
Исследование вибрационных процессов одноступенчатого зубчатого редуктора с разработкой методики по определению параметров вибрации с помощью ЭВМ
Методические указания к лабораторным работам
И. Гончаров
Техническое редактирование и корректура А. И. Гончаров
Подписано в печать 28.12.04. Формат 60х84/16.
Бумага газетная. Ризография. Усл. печ. л. 1,16.
Уч.-изд. л. 1,11. Тираж 60 экз. Изд. № 90. Заказ №
Ростовский государственный университет путей сообщения.
Ризография РГУПС.
Адрес университета: 344038, г. Ростов н/Д, пл. Народного ополчения, 2
© Ростовский государственный университет путей сообщения, 2004
Содержание
1. Указания к выполнению лабораторной работы
1.1. Основы измерения собственных корпусных вибраций машин и механизмов
1.2. Определение частот колебаний методом внешней синхронизации электронного осциллографа.
1.3. Общее представление о динамических силах, действующих на зубья тягового редуктора локомотива
1.4. Описание установки для экспериментального определения амплитуды, частоты и калибровки виброизмерительного канала
Вопросы для контроля и самопроверки
Рекомендуемая литература
1. Указания к выполнению лабораторной работы
1. Перед началом лабораторного практикума студенты проходят инструктаж по технике безопасности.
2. При выполнении лабораторной работы следует строго придерживаться приведённого в описании порядка проведения работы и выполнять правила техники безопасности. Включение приборов и оборудования производится только с разрешения преподавателя.
3. По выполненной работе составляется индивидуальный отчёт. В отчёте указывается цель работы, приводится теоретическое обоснование, даётся описание основных узлов экспериментальной установки и принципиальной схемы измерения, прикладываются обработанные виброграммы наблюдаемых вибрационных процессов.
4. Отчёт по лабораторной работе оформляется согласно общим требованиям к расчётно-графическим и учебно-исследовательским работам.
Лабораторная работа № 1
Исследование вибрационных процессов одноступенчатого зубчатого редуктора с разработкой методики по определению параметров вибрации с помощью ЭВМ
Цель работы:
Ознакомление с вибрационными процессами, возникающими в одноступенчатых редукторах подвижного состава.
1.1. Основы измерения собственных
корпусных вибраций машин и механизмов
В связи с наблюдающимся в последние годы существенным облегчением конструкций тягового подвижного состава (ТПС), повышением их экономичности, совершенствованием конструктивных и технологических схем, равно как и с увеличением единичной мощности и быстроходности тяговых и вспомогательных электрических машин локомотива, а также в связи с широким внедрением в производство различных вибрационных методов и оборудования, роль и значение вибродинамических явлений в инженерных сооружениях оказались настолько существенными, что их изучение и учёт стали важнейшими вопросами науки и практики. Для правильного решения возникающих при этом научных и инженерных задач необходим широкий сбор фактических материалов на основе натурных экспериментов эксплуатируемых тяговых агрегатов ТПС. Кроме этого, овладение современной техникой вибро-акустических измерений необходимо студентам РГУПС, специализирующихся в области локомотиво - и вагоностроения и их ремонта, а также тягового электромашиностроения. Между тем, в настоящее время студенты испытывают большую нужду в учебных методиках и пособиях по этим разделам техники.
Предлагаемая методика посвящена изложению теории, техники и методики современных виброакустических измерений, производимых, прежде всего, на железнодорожном транспорте.
1.1.1. Некоторые типы вибродатчиков
Вибродатчиками называются чувствительные элементы, воспринимающие различные параметры вибрации и служащие для регистрации вибрационных процессов. Среди большого разнообразия вибродатчиков – вибропреобразователей можно указать следующие основные типы: тензометрические, пьезоэлектричекие, магнитоэлектрические и другие датчики [1].
1.1.2. Пьезоэлектричекие датчики – пьезоэлектричекие преобразователи
Работа пьезоэлектричекого преобразователя – датчика основана на использовании прямого и обратного пьезоэффекта. Прямой пьезоэффект заключается в том, что некоторые вещества с кристаллической структурой при действии механических сил могут электрически поляризоваться. Пьезоэффект присущ кристаллам с ионными решетками. При механических воздействиях происходит деформация элементарных ячеек кристалла и смещение положительных и отрицательных ионов относительно друг друга, что ведёт к изменению электрических моментов и к поляризации кристалла в целом. С изменением деформации сжатия на деформацию растяжения направление поляризации меняется на противоположное.
Пьезоэффект присущ многим веществам. Он выражен наиболее сильно у кварца SiО2, сегнетовой соли NaКС4Н4О6·4Н2О (сокращённо обозначается КNТ), титанита бария ВаТiО3 и т. д. Широкое распространение находят исскуственные текстуры и керамика, состоящие из указанных веществ и различных присадок к ним.
Для качественной оценки пьезоэффекта учитываются следующие величины: напряжённость электрического поля Е, поляризация Р с упругим напряжением σ и величиной деформации h.
Из кристаллических тел, обладающих пьезоэффектом, наибольшим постоянством эффекта, мало зависящим от внешних условий, обладает кварц. Например, с повышением температуры до 300 °С чувствительность пьезо-эффекта не превышает нескольких процентов. Полное исчезновение пьезоэффекта происходит при 575 °С, а плавится кварц только при температуре около 1700 °С. Кварц почти не растворим в воде, поэтому на него не действует и влажность окружающей среды.
На рис. 1.1, а показан кристалл кварца SiО2 с естественной огранкой, представляющий собой шестигранную призму. При сжатии такого кристалла в направлении любой из трёх прямых N1, N2, N3, соединяющих в нормальном сечении пару противоположных вершин шестиугольника (электрические оси кристалла кварца), происходит электризация граней (рис. 1.1, б). С изменением сжатия на растяжение электрические заряды меняют знаки на обратные (рис. 1.2). Для практических целей из естественного кристалла вырезается пластинка в форме прямоугольного параллелепипеда (рис. 1.1, в, г). Ось Х, перпендикуляр-ная к плоскости пластинки, совпадает с любой из электрических осей N1, N2 или N3; ось Z совпадает с продольной осью кристалла, проходящей через вершины (оптическая или нейтральная оси); ось Y проходит перпендикулярно двум противоположным граням призмы так, что вместе с осями Х и Z образуется правая прямоугольная система координат.
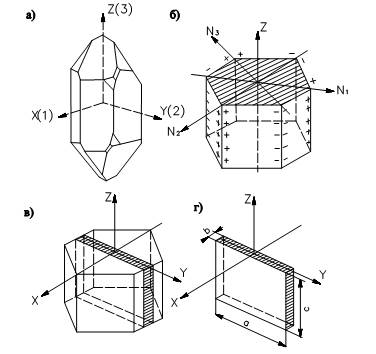
Рис. 1.1. Кристаллический кварц:
а) естественная огранка;
б) нормальное сечение кристалла: N1, N2, N3 – электрические оси;
в) образование Х-среза;
г) вырезанная пластинка
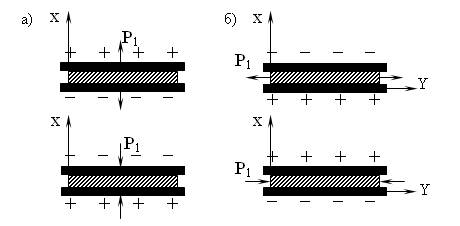
Рис. 1.2. Электризация пластинки при действии силы:
а) вдоль оси Х; б) вдоль оси Y
При действии на пластинку Х-среза кварца растягивающей силы Р1, направленной вдоль оси Х, на перпендикулярных к этой оси гранях параллелепипеда появляются равные и противоположные по знаку заряды +q1 и – q1, причём их абсолютная величина прямо пропорциональна действующей силе и не зависит от размеров (площади и толщины) вырезанной пластинки:
q1 = d11·Р1, (1)
где d11 – пьезомодуль и другие пьезоэлектрические величины.
Пьезоэффект у кварца очень слабый, и это ограничивает практические возможности его применения. Кварцевые пьезоэлементы применяются для измерения больших ускорений и в эталонных устройствах.
Особый интерес представляют пьезоэлементы из титанита бария ВаТiО3, исследованной и внедрённой в практику в значительной мере благодаря трудам советских-российских учёных.
Так как выращивание крупных кристаллов титанита бария представляет большие трудности, то обычно используется керамика, получающаяся спеканием мелких кристаллов с цементирующим веществом. Образцы подвергаются предварительной поляризации в постоянной электрическом поле напряжённостью несколько киловольт на сантиметр. Электроды наносятся вжиганием серебра при изготовлении керамики.
Различные добавки к титаниту бария, например, СаТiО3, У2О3, РbТiО3 и др., образуют составы (композиции) керамики с повышенным пьезоэффектом и большой устойчивостью физических свойств к различным внешним воздействиям (например, при больших перепадах температуры).
Удовлетворительные физические свойства, а также простота и дешевизна изготовления способствовали тому, что для целей измерения параметров вибрационных процессов машин различные по химическому составу керамики титанита бария за последние годы полностью вытеснили все остальные пьезоматериалы для изготовления пьезодатчиков (рис. 1.3).
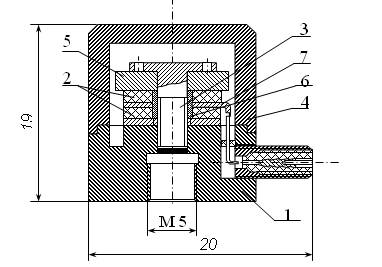
Рис. 1.3. Вибропреобразователь ДН-4-М1:
1– основание; 2 – пьезоэлемент; 3 – винт; 4 – крышка;
5 – инерционная масса; 6 – втулка; 7 – контакт
Рассмотрим устройство стандартного пьезодатчика (рис. 1.3 и 1.4).
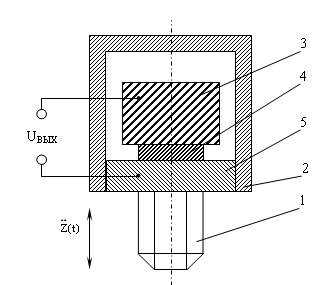
Рис. 1.4. Схема пезоэлектрического датчика
На рис. 1.4 основание 5 присоединяется к исследуемому объекту при помощи шпильки 1. На пьезоэлемент 4, имеющий форму диска, крепится инерционная масса 3, датчик закрывается крышкой 2. При вибрациях в вертикальном направлении на обкладках пьезокристалла появляется электрическое напряжение UВЫХ, пропорциональное ускорению ![]() . Возникшая разность потенциалов, таким образом, пропорциональна величине ускорения, так что UВЫХ=К·
. Возникшая разность потенциалов, таким образом, пропорциональна величине ускорения, так что UВЫХ=К·![]() , где К – коэффициент чувствительности пьезодатчика, поэтому пьезодатчики не должны превышать собственные частоты пьезокристалла. Так как жёсткость пьезоэлемента достаточно велика, то собственные частоты его имеют величину порядка десятков килогерц. В таблице 1.1 приведены данные некоторых наиболее распространённых датчиков этого типа.
, где К – коэффициент чувствительности пьезодатчика, поэтому пьезодатчики не должны превышать собственные частоты пьезокристалла. Так как жёсткость пьезоэлемента достаточно велика, то собственные частоты его имеют величину порядка десятков килогерц. В таблице 1.1 приведены данные некоторых наиболее распространённых датчиков этого типа.
Таблица 1.1
Технические данные датчиков
Характеристика датчика | Тип датчика | |||
ИС-312 | ПД-2 | Ч313 | ДН-4М1 | |
Чувствительность, мВ/g | 0,5-1,5 | 30-50 | 60 | 1 |
Частотный диапазон, Гц | 50-40000 | до 10000 | до 70000 | до 12600 |
Собственная частота, кГц | 100 | 15 | 60 | 42 |
Вес, г | 65 | 31 | 13 | 20 |
1.2. Определение частот колебаний методом
внешней синхронизации электронного осциллографа
Если на пару отклоняющих пластин электронного осциллографа подать переменное напряжение
х1(t) = А1·sin(ω1t + φ1), (2)
то электронный луч прочертит на экране прямую линию, длина которой пропорциональна амплитуде колебаний А1.
Если же переменное напряжение
х2(t) = А2·sin(ω2t + φ2), (3)
подать на другую пару пластин, то луч опишет прямую, перпендикулярную первой. При одновременном подключении переменных напряжений х1(t) и х2(t) происходит сложение колебаний в двух взаимно перпендикулярных плоскостях. Электронный луч описывает при этом на экране осциллографа некоторые замкнутые кривые. Если частоты процессов (2) и (3) находятся в простом кратном отношении  , где m и n – целые числа, то на экране осциллографа появляются замкнутые кривые различной формы, называемые фигурами Лиссажу.
, где m и n – целые числа, то на экране осциллографа появляются замкнутые кривые различной формы, называемые фигурами Лиссажу.
Исключая из уравнений (2) и (3) время, в случае совпадения круговых частот ω1 = ω2 (m = n = 1), получим уравнение траектории движения точки в виде
![]() . (4)
. (4)
Это уравнение эллипса, имеющего центр в начале координат, эксцентриситет и наклон осей которого зависят от разности фаз ψ=φ1–φ2. На рис. 1.5 изображены фигуры Лиссажу для различных значений ψ, при А1=А2 и ω1 = ω2.
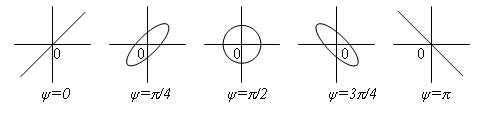
Рис.1.5. Фигуры Лиссажу для различных значений ψ
Если частоты ω1 и ω2 не совпадают, то фигуры Лиссажу имеют более сложную форму. Например, для ψ = 0 имеем фигуры, представленные на рис. 1.6.
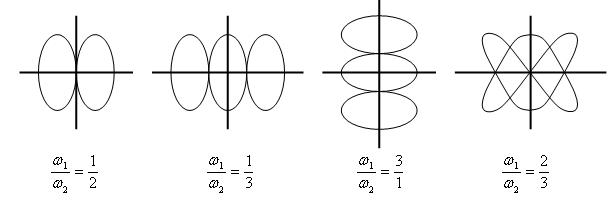
Рис. 1.6. Фигуры Лиссажу более сложной формы
Сущность метода измерения частоты внешней синхронизации заключается в следующем: к одному из входов осциллографа (обычно на вертикально отклоняющие пластины) подключается исследуемый электрический сигнал неизвестной частоты, снимаемый, например, с пьезоэлектрического датчика, ко второму входу подключается синусоидальное напряжение, частота которого известна (такой сигнал можно подать со звукового генератора ЗЧ). Меняя частоту эталонного напряжения, можно добиться появления на экране осциллографа фигуры Лиссажу, по виду которой устанавливается связь между частотой исследуемого и эталонного сигналов.
1.3. Общее представление о динамических силах,
действующих на зубья тягового редуктора локомотива
Динамические силы в тяговой зубчатой передаче (редуктора ТЗП) локомотивов приводят к возникновению нежелательных корпусных вибраций и шума в силовых агрегатах.
Для тяжелонагруженных ТЗП локомотивов большие значение приобретает проблема снижения их виброактивности на стадии изготовления и ремонта. Поэтому результаты исследований и измерения собственной корпусной вибрации (СКВ) и шума ТЗП приобретают всё большее значение, так как по параметрам СКВ можно судить о качестве изготовления и ремонта зубчатых колёс.
Характерными для тяговых зубчатых колёс (ТЗК) являются динамические силы, возникающие в зубчатых зацеплениях. К ним относятся:
- силы, возникающие при входе зубьев в зацепление в нерасчётной точке, которые создают кромочный удар;
- силы, возникающие в связи с периодическим изменением числа зубьев, передающих крутящий момент;
- силы, возникающие при одновременном проявлении обоих вышеприведённых факторов [1].
Если при вращении ТЗП зуб входит в зацепление, то он, начиная с головки, в зависимости от направления усилия, воспринимает передаваемую нагрузку. При этом зуб и тело колеса упруго взаимодействуют друг с другом и под действием силы Р они деформируются (рис. 1.3.1). Таким же образом деформируется и другой зуб, находящийся в зацеплении [2].
Деформация пары зубьев, находящихся в зацеплении, складывается из трёх этапов (рис. 1.3.2):
1) деформация в точке касания боковых поверхностей обоих зубьев вследствие смятия в зоне контакта;
2) деформации зуба колеса и части корпуса колеса;
3) деформации зуба ведущей шестерни и части корпуса шестерни.
Величина деформации зависит от силы Р, действующей в зацеплении, модуля упругости, материала зубчатого колеса, и, прежде всего, от жёсткости зуба, которая зависит от его геометрической формы. Форма зуба определяется углами зацепления соответственно в нормальном αn и в торцовом αs сечениях, а также углом наклона зуба β по делительному цилиндру (рис. 1.3.3).
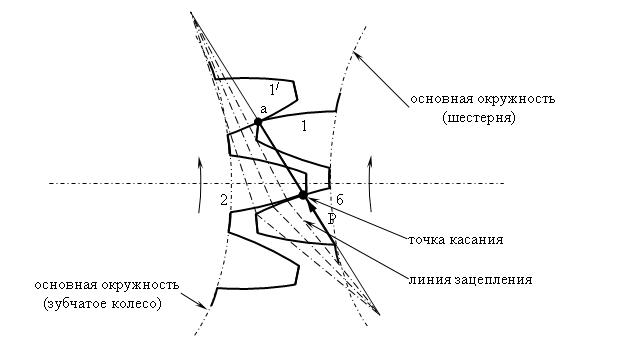
Рис. 1.3.1. Начало (а) и конец (б) кромочного удара выходящей из зацепления пары зубьев 1-1/
Деформация нагруженной зубчатой пары способствует сдвигу точки приложения усилия в сторону линии зацепления. Из этого следует, что вследствие деформации шаг зацепления для следующего зуба уменьшается. Поэтому следующая пара зубьев при обкате войдёт в зацепление слишком рано, причём произойдёт это с ударом вместо скольжения относительно друг друга [3]. Поэтому, пока зубья сохраняют свой правильный профиль, они передают усилие вдоль указанной линии а – б (рис. 1.3.1).
Вектор силы является равнодействующей усилий, направленных перпендикулярно линии контакта зацепляющих зубьев 1–1/ (рис. 1.3.2). Это усилие обусловливает возникновение на поверхности зубьев контактных напряжений. При этом окружное усилие будет
РZ = 2МКР/dШ, (5)
где МКР – передаваемый крутящий момент, кГс·м;
dШ – диаметр делительной окружности шестерни, м.
По окружному усилию РZ определяют силу Р, направленную перпендикулярно к линии контакта зацепляющихся зубьев а – б (рис. 1.3.3). Это усилие является причиной возникновения на поверхности зубьев контактных напряжений, определяемых по формуле:
![]() , (6)
, (6)
где РН=РZ/cosβ – усилие, изгибающее зуб в нормальном сечении;
РУ=РZ·tgαs – усилие, сжимающее зуб;
РК=РZ·tgβ – осевое усилие.
В этих формулах αn αs – углы зацепления соответственно в нормальном и торцевом сечениях; β – угол наклона зуба по делительному цилиндру, равный 8÷20°.
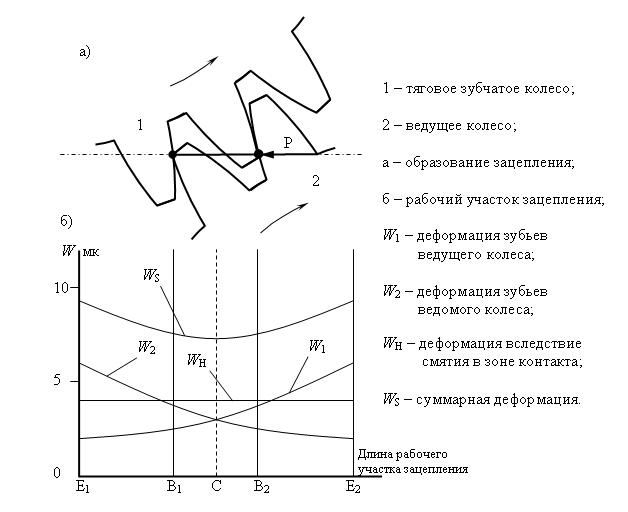
Рис. 1.3.2. Деформация сопряжения зубьев в зацеплении
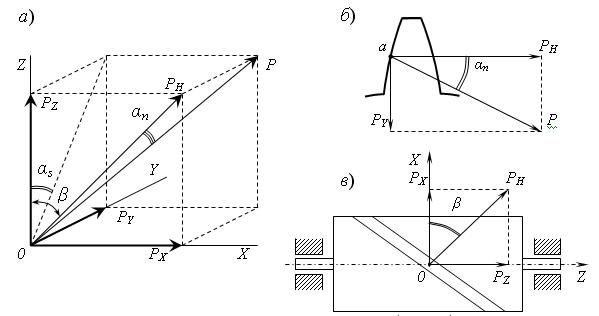
Рис. 1.3.3. Схема сил, действующих в косозубом зубчатом редукторе
Определение источников возмущающих сил основано на использовании метода кинетостатики и на составлении уравнений статики с учётом принципа Даламбера [3].
Методика определения возмущающих сил в [3] заключается в том, что при равномерном вращении ТЗК время одного периода зацепления разбивается на отрезки времени (фазы зацепления), характеризующие вход зубьев в зацепление, некоторые промежуточные положения и их выход из зацепления. Этим фазам соответствуют определённые положения контактных линий на поле зацепления. На каждом К-м отрезке времени задаётся обобщённая координата относительно перемещения зубчатых колёс αК и определяются усилия в зацеплениях i-х пар зубьев
Рi = Сi·αK + Qi, (7)
где Сi – линейные жёсткости зацепляющихся i-х пар зубьев, пропорциональные длинам контактных линий i-х пар зубьев;
αK – относительное линейное перемещение на К-м участке линии зацепления.
αK = φ1К·r1К – φ2К·r2К, (8)
где φ1К, φ2К, r1К и r2К – действительные углы поворотов зубчатых колёс и их радиусы;
Qi – дополнительная сила, обусловленная повреждённым входом и запаздыванием при выходе из зацепления в связи с наличием статической деформации и технологических ошибок шага.
Из условия статического равновесия ТЗК будем иметь:
ΣРi = РСТ, (9)
где РСТ = М1/r1, а с учётом инерционного члена ![]() составляется дифференциальное уравнение движения в виде
составляется дифференциальное уравнение движения в виде
![]() , (10)
, (10)
где J – приведённый момент инерции, равный ![]() ,
,
ωк – угловая скорость зубчатого колеса;
ΣСi – суммарная жёсткость пары зубьев изменяется по фазе зацепления и рассчитывается по формуле:
ΣСi =![]() , (11)
, (11)
где h – относительное (в долях модуля зацепления) расстояние от точки приложения нагрузки до основания зуба;
Р – нагрузка, действующая на зуб;
в – ширина зубчатого венца;
Е – модуль упругости.
Суммарная деформация зубьев, находящихся в зацеплении, определяется по выражению:
ωΣ = ![]() , (12)
, (12)
Число уравнений (11) равно числу фаз зацепления, причём αK в конце предыдущей фазы зацепления и в начале последующей равны между собой.
Для того, чтобы записать единственное уравнение движения зубьев для всех фаз за один период зацепления, вводится новая координата β/, отсчитываемая от одного определённого положения статического равновесия, что позволяет получить единственное уравнение движения зубьев в ТЗК за период зацепления в виде:
![]() , (13)
, (13)
α = β/ + РСТ/С0,
где С0 – коэффициент жёсткости зубчатых колёс.
Правая часть уравнения (13) является функцией времени и задана на каждом из рассмотренных отрезков времени. Силы, входящие в правую часть данного уравнения, являются возмущающими силами.
Таким образом, результаты вышеприведённых исследований динамических сил, генерируемых различными зубьями в ТЗП, показывают, что возбуждение колебаний в зубчатом зацеплении в режиме нормального функционирования обусловлено следующими факторами:
– технологическими погрешностями изготовления;
– периодическим изменением жёсткости зубьев по фазе зацепления и качеством сборки ТЗП.
В исследованиях СКВ тяговых зубчатых колёс возмущающая сила задаётся в виде некоторой гармонической функции
Рi = Ai·sinωt, (14)
где Ai = Ci·δэф, здесь δэф – эффективная погрешность изготовления зубьев.
При виброакустической диагностике технология определения локальных дефектов в ТЗК может быть реализована двумя способами: путём амплитудной или частичной демодуляции виброакустических сигналов на вынужденных частотах, т. е. на гармониках зубцовой частоты i·ωZ, или путём амплитудной демодуляцией сигнала в зоне собственной частоты ωП.
Выражение спектра для узкополостного виброакустического процесса в окрестности i-й гармоники зубцовой частоты может быть представлено в виде:
 , (15)
, (15)
где ωZ – частота пересопряжения зубьев;
ω – частота попадания локального дефекта в зону контакта;
m – парциальный индекс амплитудной модуляции, вызванный дефектом;
Мj – парциальный индекс частотной модуляции, вызванный заеданием зубьев или скрытыми дефектами в них.
По данным [4] вибрация и шум в ТЗК определяется частотой зацепления и её гармониками, а шум определяется его звуковыми составляющими.
На рис.1.3.4 представлены спектры шума пары колёс «а» и «б», не имеющие погрешностей, а на «в» имеется погрешность +8;–8;–8 и +8 мкм. Здесь четыре зуба образуют одинаковые погрешности зацепления. При 24 зубьях погрешности повторяются шесть раз за один оборот. В соответствии с этим, усиление или ослабление ударов при зацеплении зубьев имеет место шесть раз за один оборот. Эта модуляция отражается на спектрах частоты в идее боковых полос, расположенных около звуковой составляющей, имеющей частоту зацепления колёс. Расстояние от боковой полосы до компоненты зацепления равно шестикратной частоте вращения, что изображено на рис. 1.3.4, в отрезком 6fп.

Рис. 1.3.4. Спектр шума у зацеплений, не имеющих погрешностей:
а – график погрешностей зацепления 0мк, левый профиль зуба;
б – график погрешностей зацепления 0мк, правый профиль зуба;
в – график погрешностей зацепления в левом профиле зуба +8; –8; –8; +8 мк
Таким образом, кинематические погрешности зацепления решительным образом влияют на теоретическую эпюру усилий в зацеплении. Если зацепление имеет погрешность профиля зуба, то интенсивность шума и вибрации может быть доказана с помощью звуковых составляющих, частоты которых соответствуют периодичности погрешности в ТЗК.
Погрешность шага изменяет распределение нагрузки на зубья при двукратном зацеплении.
Косозубое зацепление имеет значительное преимущество перед прямозубым зацеплением, в частности, уменьшения вибрации и шума в ТЗК.
Снижение вибрации и шума не произойдёт, если зацепление имеет периодическую погрешность профиля зуба, которая возникает из-за кинематических погрешностей в зубонарезном станке. Поэтому кинематические погрешности ТЗК классифицируются на накопленную погрешность; зубцовую погрешность и на циклическую погрешность.
1.4. Описание установки для экспериментального определения
амплитуды, частоты и калибровки виброизмерительного канала
Экспериментальная установка, используемая в данной работе, состоит из установки СУПВ-0.1 с вибратором типа ВЭД-10, упрощённая блок-схема приведена на рис. 1.4.1. Блок-схема установки с автоматическим поддержанием заданных уровней вибрации виброплиты представлена на рис. 1.4.2.
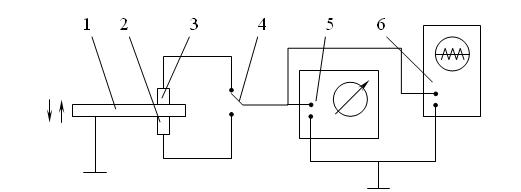
Рис. 1.4.1. Схема установки датчика чувствительности датчиков
генераторного типа:
1 – платформа вибрационного стенда; 2 – контрольный датчик; 3 – испытуемый датчик; 4 – переключатель датчиков; 5 – электронный вольтметр;
6 – электронный осциллограф для визуального наблюдения формы вибрации

Рис. 1.4.2. Блок-схема установки с автоматическим поддержанием заданных уровней вибрации виброплиты:
1 – задающий генератор; 2 – нелинейный усилитель; 3 – выходной усилитель;
4 – «компрессор»; 5 – генератор с электроприводом и «компрессором»;
6 – усилитель; 7 – постоянный магнит; 8 – контрольный образцовый виброприёмник; 9 – виброплита; 10 – испытуемый виброприёмник; 11 – обмотка возбудителя
Вибратор с электродинамическим приводом строится обычно по принци-пу электродинамического громкоговорителя, называемого калибровочной плитой, представлен на рис. 1.4.3. В силовую катушку пускается переменный ток от звукового задающего генератора. Взаимодействуя с магнитным полем постоянного магнита или электромагнита, катушка вместе с платформой приходит в колебание в направлении продольной оси с частотой переменного тока. При помощи такого вибратора можно получать вибрации с частотой до 20000 Гц и выше.
Инерционный элемент М подвешен на пружине с коэффициентом упругости k и сочленён с силовой катушкой, состоящей из n витков радиуса R, находящихся в зазоре постоянного магнита с индукцией В. Кроме того, на рис. 1.4.3 обозначено: r – омическое сопротивление обмотки и L – её индуктивность. Привод осуществляется от звукового генератора, создающего на зажимах напряжение U(t).
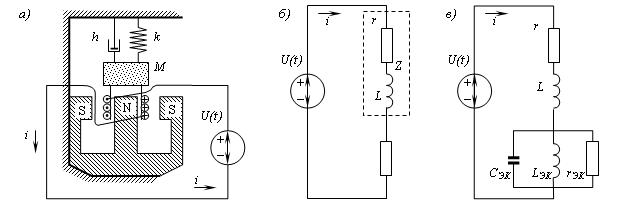
Рис. 1.4.3. Электродинамический преобразователь (на примере электродинамического стенда):
а) механическая часть системы;
б) электрический аналог системы;
в) эквивалентная схема системы
На рис. 1.4.3, б приведён электрический аналог этой системы. Рассмотрение образовавшихся контуров позволяет делать важные заключения о роли параметров системы, об их влиянии на смещения у соответствующей массы, о возможности возникновения резонансных явлений и др.
Кинетическая энергия всей электродинамической системы будет:
 , (16)
, (16)
где ![]() =i – ток, протекающий в электрической цепи при изменении заряда q.
=i – ток, протекающий в электрической цепи при изменении заряда q.
Положительное направление этого тока отмечено на схеме стрелкой и точкой в центре сечения витка обмотки. Соответственно этому полюса генератора U(t) получают знаки «+» и «–».
Потенциальная энергия рассматриваемой системы будет
ЕПОТ = 0,5к·у2, (17)
где к – коэффициент упругости пружины.
Вибрация корпусов различных машин и механизмов является одним из сложных процессов, если иметь в виду все степени свободы машины как твёрдого тела и широкий спектр колебаний, которые могут быть периодическими, случайными, импульсными и т. д.
Поэтому сложной является и информация о вибрации корпуса машины как твёрдого тела. Информация о вибрации тела является полной, если шесть независимых координат, определяющих положение тела в пространстве, характеризуется вектором абсолютного смещения S(t). Практически рассматриваются три компонента этого вектора SX(t), SY(t), SZ(t) в прямоугольных координатах прямой принятой системы отчёта (рис. 1.4.1)[6].
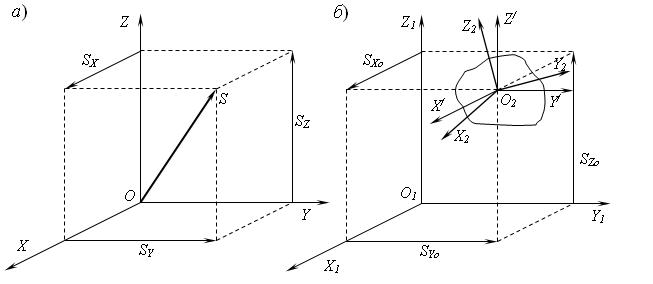
Рис. 1.4.4. Системы координат определения положения твёрдого тела в пространстве:
а – положение точки;
б – положение тела, смещённого и повёрнутого относительно положения равновесия
Система относительных координат X2, Y2, Z2 жёстко связана с телом; её начало – точка О2 выбирается в центре тяжести, оси направлены вдоль главных осей. Система абсолютных координат X1, Y1, Z1 направлена вдоль осей X2, Y2, Z2. Поэтому при указанном выборе координатных осей исследование движения тела сводится к исследованию вибрации корпуса машины, т. е. перемещения системы координат X2, Y2, Z2 по отношению к неподвижной системе координат X1, Y1, Z1 в произвольный момент времени. Выбор этих независимых координат неоднозначен. В частности, ими могут быть линейные смещения SX(t); SY(t); SZ(t) и конечные углы поворота αX(t); αY(t); αZ(t).
Из этих данных могут быть получены и все другие величины и параметры вибрации, которыми может интересоваться студент или исследователь.
Чувствительность U виброизмерительного прибора или акустического канала определяется как отношение выходного сигнала по напряжению или току η(t) к входному ξ(t).
![]() . (18)
. (18)
На вход акустического канала подаётся измеряемая величина ξ(t) и с выхода снимается отклик η(t), который представляется в виде виброграммы и является первичным документом.
Величина U должна быть постоянной, не зависящей ни от величины, ни от формы сигнала ξ(t). Отклик и сигнал должны иметь одинаковую форму.
Акустический канал должен состоять из линейных элементов, т. е. таких элементов, которые сохраняют значение своих параметров – масс, коэффициентов упругости, ёмкости, сопротивлений – неизменными во времени и в заданных пределах значений сигнала и отклика. Таким образом, амплитудно-частотная характеристика (АЧХ) должна быть линейной (рис. 1.4.5).
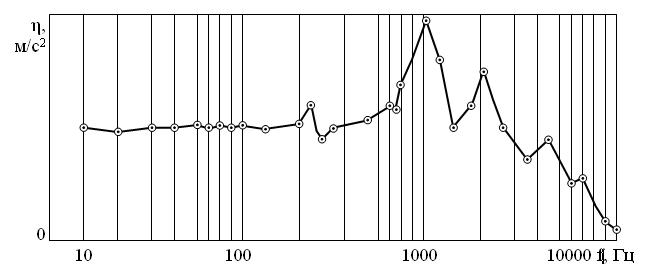
Рис. 1.4.5. Типичная амплитудно-частотная характеристика виброизмерительного канала
Вопросы для контроля и самопроверки:
1. Что называется вибрацией машин?
2. Принцип действия пьезодатчика.
3. Устройство пьезодатчика.
4. Способы образования вибрации в зубчатых передачах.
5. Что называется акустическим каналом?
6. Как снимается амплитудно-частотная характеристика датчика?
Рекомендуемая литература
1. Г. Основы виброакустической диагностики тяговых приводов локо-мотивов. Докторская диссертация. – Ростов н/Д: Феникс, 1998.
2. И. Вибрация. – М.: Машиностроение, 1963.
3. И., Ю., И. Динамические нагрузки в зубчатых передачах с прямозубыми колёсами. – М.: АН СССР, 1956.
4. Вибрация в технике. Т.3. – М.: Машиностроение, 1980.
5. Л. Исследование статики и динамики планетарных механиз-мов. Автореферат докторской диссертации. – М., 1973.
6. Г., И. Курс теоретической механики. Т.1. – М.: ГИТТ Л1, 1954.
 Основные порталы (построено редакторами)
Основные порталы (построено редакторами)