Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Графически процесс торможения показан на рис. 6.9.
Кривые ![]() и
и ![]() относятся к двигателю с короткозамкнутым ротором, а кривые
относятся к двигателю с короткозамкнутым ротором, а кривые ![]() и
и ![]() - к двигателю с фазным ротором. Пунктиром показаны тормозные характеристики.
- к двигателю с фазным ротором. Пунктиром показаны тормозные характеристики.
При режиме работы, соответствующем точке а, и переводе двигателя в тормозной режим (переключением, например, двух фаз) двигатель переходит с характеристики ![]() на характеристику
на характеристику ![]() (в режим, соответствующий точке
(в режим, соответствующий точке ![]() ) и снижает частоту вращения
) и снижает частоту вращения ![]() , что показано кривой
, что показано кривой ![]() . Включение в цепь фазного ротора добавочного активного сопротивления позволяет сдвинуть максимум момента в область скольжения
. Включение в цепь фазного ротора добавочного активного сопротивления позволяет сдвинуть максимум момента в область скольжения ![]() (обеспечив тем самым устойчивое электромагнитное торможение) и регулировать тормозной момент. На рис. 6.9 этот процесс показан переходом машины, работающей по кривой
(обеспечив тем самым устойчивое электромагнитное торможение) и регулировать тормозной момент. На рис. 6.9 этот процесс показан переходом машины, работающей по кривой ![]() , из режима, соответствующего точке
, из режима, соответствующего точке ![]() , в точку
, в точку ![]() и снижением частоты вращения по кривой
и снижением частоты вращения по кривой ![]() . Добавочное сопротивление наряду с сокращением времени торможения уменьшает токи и потери энергии.
. Добавочное сопротивление наряду с сокращением времени торможения уменьшает токи и потери энергии.
 Динамическое торможение заключается в том, что при вращающемся по инерции роторе обмотку статора переключают с переменного тока на постоянный (рис. 6.10). Асинхронный двигатель переводят этим в ре-жим синхронного генератора: в неподвижном магнитном поле вращается ротор; в его проводниках индуцируется ЭДС и течет ток, величины которых пропорциональны частоте вращения; электромагнитный момент имеет направление, обратное инерционному.
Динамическое торможение заключается в том, что при вращающемся по инерции роторе обмотку статора переключают с переменного тока на постоянный (рис. 6.10). Асинхронный двигатель переводят этим в ре-жим синхронного генератора: в неподвижном магнитном поле вращается ротор; в его проводниках индуцируется ЭДС и течет ток, величины которых пропорциональны частоте вращения; электромагнитный момент имеет направление, обратное инерционному.
В процессе торможения электромагнитный момент по своей форме аналогичен моменту машины, работающей в двигательном режиме. Дополнительно включенное в цепь фазного ротора сопротивление сдвигает максимум момента в сторону больших скольжений. Регулируют величину тормозного момента изменением тока возбуждения и величиной активного сопротивления ротора.
Режим динамического торможения можно получить и при отсутствии источника постоянного тока, подключив обмотки статора к конденсаторам. В этом режиме по обмотке статора и конденсаторам проходит трехфазный переменный ток и машина работает как асинхронный генератор с самовозбуждением, который получает реактивный ток ![]() , необходимый для возбуждения магнитного потока от конденсаторов.
, необходимый для возбуждения магнитного потока от конденсаторов.
По мере уменьшения частоты вращения ротора в результате выделения тепла в активном сопротивлении обмоток энергия магнитного поля и тормозной момент уменьшаются. При частоте вращения ![]() тормозной момент равен нулю.
тормозной момент равен нулю.
Рекуперативный способ торможения заключается в переводе двигателя в генераторный режим при частоте вращения ротора, большей частоты вращения магнитного поля статора (![]() ). В этом случае машина отдает в сеть энергию, величина которой пропорциональна частоте вращения, за счет чего ротор и затормаживается.
). В этом случае машина отдает в сеть энергию, величина которой пропорциональна частоте вращения, за счет чего ротор и затормаживается.
Рекуперативное торможение возможно в крановых схемах, когда момент опускаемого груза превышает критический момент двигателя, или в многоскоростных двигателях, когда их переключат с высших скоростей на низшие. Процесс торможения показан на рис. 6.11. Работая в точке а с частотой вращения ![]() , двигатель (после переключения числа полюсов) переходит в режим, соответствующий точке б и, затормаживаясь (кривая 2), снижает свою частоту вращения до нового установившегося значения
, двигатель (после переключения числа полюсов) переходит в режим, соответствующий точке б и, затормаживаясь (кривая 2), снижает свою частоту вращения до нового установившегося значения ![]() в точке в.
в точке в.
Переход из двигательного режима в генераторный происходит автоматически, когда частота вращения ротора ![]() превосходит частоту вращения магнитного поля
превосходит частоту вращения магнитного поля ![]() .
.
 Генераторному режиму соответствуют участки механических характеристик, расположенных в области отрицательных моментов (рис. 6.11). Форму механических характеристик можно изменить, включив в цепь ротора добавочное активное сопротивление (пунктирная кривая на рис. 6.11), и при заданной частоте вращения
Генераторному режиму соответствуют участки механических характеристик, расположенных в области отрицательных моментов (рис. 6.11). Форму механических характеристик можно изменить, включив в цепь ротора добавочное активное сопротивление (пунктирная кривая на рис. 6.11), и при заданной частоте вращения ![]() получить различные тормозные моменты.
получить различные тормозные моменты.
Рекуперативное торможение с энергетической точки зрения весьма выгодно, так как кинетическая энергия вращающихся масс превращается в процессе торможения в электрическую, отдаваемую в сеть. При использовании частотного управления асинхронными двигателями (например, в электроприводах тяговых и грузоподъемных механизмов) в процессе торможения можно плавно уменьшать частоту вращения ![]() практически до нуля, осуществляя рекуперативное торможение до полной остановки двигателя.
практически до нуля, осуществляя рекуперативное торможение до полной остановки двигателя.
ТЕСТ ДЛЯ САМОПРОВЕРКИ
ТЕМА: РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ И ТОРМОЖЕНИЕ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
1. ПОТРЕБЛЯЕМАЯ МОЩНОСТЬ ПРИ РЕГУЛИРОВАНИИ СКОРОСТИ ПУСКОВЫМ РЕОСТАТОМ…..
а) увеличивается;
б) уменьшается;
в) остается постоянной;
г) увеличивается незначительно.
(Эталон: в)
2. ПОСЛЕДОВАТЕЛЬНОСТЬ ПУСКА АСИНХРОННОГО ДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ ВКЛЮЧЕНИЕМ КОНТАКТОРОВ:
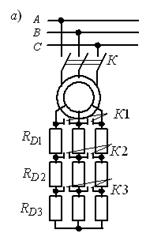
а) К;
б) К1;
в) К2;
г) К3.
(Эталон: а, г, в, б)
3. СПООСБЫ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ МАГНИТНОГО ПОЛЯ, ИЗМЕНЕНИЕМ:
а) частоты питающего напряжения;
б) числа пар полюсов;
в) напряжением питающей сети;
г) введением в ротор добавочного сопротивления.
(Эталон: а, б).
4. СПОСОБЫ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ПРИ КОТОРЫХ КПД ОСТАЕТСЯ ВЫСОКИМ, ИЗМЕНЕНИЕМ:
а) частоты питающего напряжения;
б) числа пар полюсов;
в) напряжением питающей сети;
г) введением в ротор добавочного сопротивления.
(Эталон: а, б).
5. КРИТИЧЕСКИЙ МОМЕНТ ДВИГАТЕЛЯ ПРИ ЧАСТОТНОМ РЕГУЛТРОВАНИИ ![]() __________.
__________.
(Эталон: постоянный).
6. КРИТИЧЕСКИЙ МОМЕНТ ДВИГАТЕЛЯ ПРИ ЧАСТОТНОМ РЕГУЛТРОВАНИИ ![]() и
и ![]() __________.
__________.
(Эталон: уменьшается).
7. РЕГУЛИРОВАНИЕ МНОГОСКОРОСТНОГО ДВИГАТЕЛЯ ОСУЩЕСТВЛЯЕТСЯ ИЗМЕНЕНИЕМ:
а) частоты питающей сети;
б) значение напряжения сети;
в) числа пар полюсов;
г) добавочного сопротивления.
(Эталон: г).
8. ПРЕИМУШЕСТВО РЕГУЛИРОВАНИЯ СКОРОСТИ ИЗМЕНЕНИЕМ СОПРОТИВЛЕНИЯ В ЦЕПИ РОТОРА:
а) сохранение перегрузочной способности;
б) сохранение жесткости характеристики;
в) повышение коэффициента мощности установки.
(Эталон: а, в).
9. МАКСИМАЛЬНЫЙ МОМЕНТ ДВИГАТЕЛЯ ПРИ РЕГУЛИРОВАНИЯ СКОРОСТИ УМЕНЬШЕНИЕМ НАПРЯЖЕНИЯ СЕТИ:
а) увеличивается;
б) уменьшается;
в) остается неизменным.
(Эталон: б).
10. ДИАПАЗОН ЧАСТОТЫ ВРАЩЕНИЯ ПРИ РЕГУЛИРОВАНИИ СКОРОСТИ ИЗМЕНЕНИЕМ НАПРЯЖЕНИЯ СЕТИ:
а) от 0 до ![]() ;
;
б) от 0 до ![]() ;
;
в) от ![]() до
до ![]() .
.
(Эталон: в).
11. ТОРМОЗНЫЕ РЕЖИМЫ АСИНХРОННОЙ МАШИНЫ:
а) электромагнитное торможение;
б) генераторный с выдачей энергии в сеть;
в) генераторный с гашением энергии в цепи ротора;
г) силовое торможение.
(Эталон: а, б, в).
12. ДИНАМИЧЕСКОЕ ТОРМОЖЕНИЕ ВОЗМОЖНО ПРИ….
а) изменении чередования фаз двигателя;
б) отключении статора от сети;
в) отключении статора от сети и подключении 2-х фаз к постоянному току.
(Эталон: в).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
 Основные порталы (построено редакторами)
Основные порталы (построено редакторами)