

Рисунок 6.5 Расчетная схема
Угловая скорость ![]() и угловое ускорение
и угловое ускорение ![]() колеса:
колеса:
 , (6.18)
, (6.18)
 . (6.19)
. (6.19)
Отрицательный знак перед дробью показывает, что в восходящей части траектории, где ![]() , угловое ускорение отрицательно, т. е. направлено в сторону, противоположную направлению угловой скорости
, угловое ускорение отрицательно, т. е. направлено в сторону, противоположную направлению угловой скорости ![]() ; в нисходящей части угловое ускорение положительно.
; в нисходящей части угловое ускорение положительно.
Вектор ![]() есть скорость точки
есть скорость точки ![]() прямой
прямой ![]() , вращающейся около точки
, вращающейся около точки ![]() (центра кривизны неподвижной полодии в точке
(центра кривизны неподвижной полодии в точке ![]() ). Поэтому:
). Поэтому:
 . (6.20)
. (6.20)
Ускорение точки ![]() оси колеса направлено по лучу
оси колеса направлено по лучу ![]() от точки
от точки ![]() к
к ![]() и равно:
и равно:
 . (6.21)
. (6.21)
Ускорение любой точки ![]() неизменяемой плоской системы, движущейся в своей плоскости представляется в виде геометрической суммы ускорения точки
неизменяемой плоской системы, движущейся в своей плоскости представляется в виде геометрической суммы ускорения точки ![]() и ускорения вращения точки
и ускорения вращения точки ![]() относительно
относительно ![]() . На рисунке 6.7 показаны три составляющие ускорения точки
. На рисунке 6.7 показаны три составляющие ускорения точки ![]() . Проекция суммарного ускорения точки
. Проекция суммарного ускорения точки ![]() на вертикаль будет равна:
на вертикаль будет равна:
 . (6.22)
. (6.22)
Формула представляет решение вопроса о вертикальных ускорениях центра колеса, получаемых во время качения по накопленной неровности.
Вертикальное ускорение![]() при условии, что колесо катится по выпуклому контуру, направлено вниз. Так как угол
при условии, что колесо катится по выпуклому контуру, направлено вниз. Так как угол ![]() невелик и заключен между пределами
невелик и заключен между пределами ![]() , то знак
, то знак ![]() сохраняется на всем контуре.
сохраняется на всем контуре.
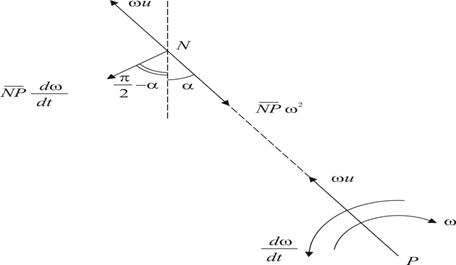
Рисунок 6.6 Расчетная схема
При восходящем и при нисходящем движении колеса ускорение направлено вниз, а сила инерции – вверх; весь период качения колеса по поверхности неровности есть период облегченного давления колеса на накопленную неровность. Ускорение и сила инерции по мере движения колеса изменяются обратно пропорционально величине ![]() . Если сечение неровности представляет собой сечение круга, то ускорение уменьшается по закону
. Если сечение неровности представляет собой сечение круга, то ускорение уменьшается по закону ![]() до достижения высшей точки траектории; где достигает своего минимума. Во время нисходящего движения колеса ускорение увеличивается по тому же закону. Радиусы кривизны колеса
до достижения высшей точки траектории; где достигает своего минимума. Во время нисходящего движения колеса ускорение увеличивается по тому же закону. Радиусы кривизны колеса ![]() и накопленной неровности
и накопленной неровности ![]() не играют роли каждый в отдельности; величина ускорения зависит лишь от их суммы. Большое колесо, катящееся по профилю большой кривизны и малое колесо, катящееся по профилю малой кривизны, дают один и тот же эффект, если в обоих случаях сумма
не играют роли каждый в отдельности; величина ускорения зависит лишь от их суммы. Большое колесо, катящееся по профилю большой кривизны и малое колесо, катящееся по профилю малой кривизны, дают один и тот же эффект, если в обоих случаях сумма ![]() - одна и та же.
- одна и та же.
При данном радиусе ![]() сила инерции будет тем меньше, чем больше будет радиус кривизны
сила инерции будет тем меньше, чем больше будет радиус кривизны ![]() . Колеса большего диаметра вызывают меньшие силы инерции и меньший динамический эффект. При данном радиусе колес
. Колеса большего диаметра вызывают меньшие силы инерции и меньший динамический эффект. При данном радиусе колес ![]() силы инерции будут уменьшаться с увеличением радиуса
силы инерции будут уменьшаться с увеличением радиуса ![]() . Для этапа взаимодействия колеса с радиальной поверхностью накопленной неровности высота препятствия сама по себе не играет никакой роли; важна кривизна его поверхности.
. Для этапа взаимодействия колеса с радиальной поверхностью накопленной неровности высота препятствия сама по себе не играет никакой роли; важна кривизна его поверхности.
Формула (6.22) справедлива и при наличии переходной кривой от профиля неровности к дорожному покрытию. Переходная кривая имеет смысл, если по абсолютной величине ее радиус кривизны ![]() ; в противном случае колесо не сможет катиться по ней. Так как она обращена выпуклостью по направлению к дорожному покрытию, то
; в противном случае колесо не сможет катиться по ней. Так как она обращена выпуклостью по направлению к дорожному покрытию, то ![]() . Во время движения по переходной кривой ускорение направлено вверх, а давление колеса при этом превышает статическое. При переходе через точку касания обеих кривых ускорение и сила инерции меняют свой знак на обратный.
. Во время движения по переходной кривой ускорение направлено вверх, а давление колеса при этом превышает статическое. При переходе через точку касания обеих кривых ускорение и сила инерции меняют свой знак на обратный.
Формула (6.22) представляет решение вопроса и для движения колеса в углублении или впадине пути.
Также рассматриваются начальный и конечный моменты, т. е. припод-нимание колеса с дорожного покрытия, когда оно встречается с накопленной неровностью, и вступление на покрытие, когда покидает неровность. При соблюдении вышеуказанных условий (абсолютной жесткости дорожного покрытия, а также неровности и колеса) ускорение в оба эти момента направлено вверх и равно ∞. Сила инерции также равна ∞. Оба эти момента времени имеют малую продолжительность. Имеется два удара, направленных вниз.
Второй случай можно привести к виду удара груза ![]() , падающего с высоты
, падающего с высоты ![]() . Формулы представлены в общем виде и годятся при любом выпуклом очертании поверхности накопленной неровности. В случае кругового очертания сечения неровности можно выразить угол
. Формулы представлены в общем виде и годятся при любом выпуклом очертании поверхности накопленной неровности. В случае кругового очертания сечения неровности можно выразить угол ![]() в функции от основных размеров.
в функции от основных размеров.
Получено:
 . (6.23)
. (6.23)
Величина удара пропорциональна квадрату скорости и зависит от отношения между суммой радиусов кривизны и высотой ![]() препятствия. Если обозначить
препятствия. Если обозначить ![]() , то формула (6.23) будет упрощена:
, то формула (6.23) будет упрощена:
 . (6.24)
. (6.24)
Зависимость ![]() от
от ![]() имеет гиперболический вид. При увеличении
имеет гиперболический вид. При увеличении ![]() от 1 до
от 1 до ![]() величина
величина ![]() , а вместе с ней и сила удара уменьшается от
, а вместе с ней и сила удара уменьшается от ![]() до 0. При данных размерах препятствия (т. е. размерах
до 0. При данных размерах препятствия (т. е. размерах ![]() ,
, ![]() ) увеличение радиуса колес влечет за собой уменьшение силы удара.
) увеличение радиуса колес влечет за собой уменьшение силы удара.
6.4.3 Рекомендуется использовать программный модуль имитационного моделирования процесса динамического взаимодействия колеса транспортного средства и дорожного покрытия с единичными и накопленными неровностями в среде МАТЛАБ. Результаты работы программного комплекса (типовые примеры) приведены в приложении 2 (представлены скриншоты изображений).
6.4.4 Достоинством методики является возможность получать численные ряды ускорений для сочетаний неровностей в виде коротких, средних и длинных волн.
6.4.5 Методика показывает нелинейный характер изменения вертикальных ускорений колеса по отношению к скорости транспортного средства, что будет учтено в формуле 6.30 (корреляционной зависимости взаимовлияния изменения коэффициента ровности IRI и изменения коэффициента динамичности с учетом квадратного корня скорости транспортного средства).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
