

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ И КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ СИСТЕМЫ С ЛОГИЧЕСКИМ РЕГУЛЯТОРОМ
,
Вычислительный центр им. РАН, *****@***ru,
Елецкий государственный университет им. , *****@***ru
Дано развитие первого метода Ляпунова исследования устойчивости системы с логическим регулятором. Проведено компьютерное моделирование и построены фазовые портреты двумерной системы.
Ключевые слова – устойчивость, система управления, логический регулятор, первый метод Ляпунова, бифуркация.
2. Введение
Исследование устойчивости систем с логическими регуляторами является актуальной проблемой при изучении управляемых систем [1–5]. Одним из способов решения этой задачи является геометрический метод, основанный на изучении векторных полей объекта управления и регулятора [3, 4]. В работах [2, 5] изучение устойчивости систем управления приводится с помощью разрывных функций Ляпунова. В настоящей работе проведено исследование устойчивости и компьютерное моделирование двумерной системы с логическим регулятором. Введено понятие «запас устойчивости». Для исследования устойчивости использован спектрально-бифуркационный метод, базирующийся на совместном использовании критерия Ляпунова и бифуркационной картины поля состояний системы.
3. Исследование устойчивости системы с логическим регулятором
Рассмотрим двумерную управляемую систему с логическим регулятором, описываемую уравнениями вида
 (1)
(1)
где f1(0, 0) = f2(0, 0) = F(0, 0) = 0, f1(x1, x2) и f2(x1, x2) – монотонные функции, F(x1, x2) –нелинейная функция, описывающая работу логического регулятора. Дефаззификация F(x) определяется формулой ![]() =L2
=L2![]() , где символ ° означает операцию композиции; L2 – оператор дефаззификации;
, где символ ° означает операцию композиции; L2 – оператор дефаззификации; ![]() *
*![]() – степень принадлежности пары (x, u) к правилу П(i),
– степень принадлежности пары (x, u) к правилу П(i), ![]() – функция принадлежности u к множеству Ui,
– функция принадлежности u к множеству Ui, ![]() – результат агрегирования степеней принадлежности входа xi к множеству Xi, символ * означает операцию логического минимума или алгебраического произведения;
– результат агрегирования степеней принадлежности входа xi к множеству Xi, символ * означает операцию логического минимума или алгебраического произведения; ![]() *
*![]() *…*
*…*![]() , i = 1, …, n, – нечеткий выход, соответствующий входу
, i = 1, …, n, – нечеткий выход, соответствующий входу  ;
; ![]() – база правил регулятора. Результат действия F(x) соответствует управляющему воздействию на объект управления.
– база правил регулятора. Результат действия F(x) соответствует управляющему воздействию на объект управления.
Состояние равновесия x1 = x2 = 0 системы (1) устойчиво, если спектр матрицы характеристического уравнения системы (1) гурвицев. Состояние равновесия системы (1) x1 = x2 = 0 неустойчиво в случае статической бифуркации и бифуркации Хопфа.
Характеристический многочлен матрицы Якоби  для функции f(x) в точке x = 0 имеет вид P(s) = det(s×I – J2). Очевидно, что det(s×I – J2) = =s2 – s×(a11 + a22) + a11×a22 – a12×a21. Тогда
для функции f(x) в точке x = 0 имеет вид P(s) = det(s×I – J2). Очевидно, что det(s×I – J2) = =s2 – s×(a11 + a22) + a11×a22 – a12×a21. Тогда
P(s) = s2 + a1×s + a2, (2)
где a1 = –(a11 + a22) = –tr(J2), a2 = a11×a22 – a12×a21 = det(J2).
Статическая бифуркация имеет место, если один из корней полинома P(s) равен нулю. Это означает, что величина a2 в (2) равна нулю. Тогда условие a2 = 0 является условием потери устойчивости системы (2.6) при статической бифуркации. Чем больше значение a2, тем быстрее оно приближается к точке бифуркации. Следовательно, значение a2 определяет запас устойчивости. Этот показатель определяет, насколько далека система от потери устойчивости в точке x = 0. Тогда = a2 = det(J2).
Бифуркация Хопфа имеет место, если два комплексных собственных значения характеристического многочлена имеют нулевую действительную часть. Это означает, что величина a1 в (2) равна нулю. В этом случае имеем запас устойчивости = –tr(J2).
Компенсация векторных компонентов объекта управления и регулятора происходит только в области пространства состояния, где компонент объекта управления имеет направление (b1, b2). Определим дополнительное подпространство в виде ![]() . Это выражение представляет одномерное подпространство пространства состояний, в котором происходят статические бифуркации. Тогда запас устойчивости определим как минимальное расстояние между функциями f(x) и b×F(x), вычисленное на дополнительном подпространстве:
. Это выражение представляет одномерное подпространство пространства состояний, в котором происходят статические бифуркации. Тогда запас устойчивости определим как минимальное расстояние между функциями f(x) и b×F(x), вычисленное на дополнительном подпространстве:  , где WC – дополнение области W = (g1, g2) в окрестности точки x1 = x2 = 0, g1 и g2 – граничные значения, удовлетворяющие равенствам: F¢(g1) = –f ¢(g1), F¢(g2) = –f ¢(g2).
, где WC – дополнение области W = (g1, g2) в окрестности точки x1 = x2 = 0, g1 и g2 – граничные значения, удовлетворяющие равенствам: F¢(g1) = –f ¢(g1), F¢(g2) = –f ¢(g2).
4. Результаты моделирования
Рассмотрим нелинейную систему, описываемую уравнением
![]() . (3)
. (3)
С помощью замены y = x1, ![]() перейдем к системе двух дифференциальных уравнений
перейдем к системе двух дифференциальных уравнений
![]() (4)
(4)
где b1 = a2 = 12,7388, a1 = 2,2165, и выполняется неравенство ïuï£ 0,6.
При u = 0 система (4) является открытой и имеет устойчивый фокус (рис. 1). Рис. 2 соответствует переходному режиму открытой системы.
![]()
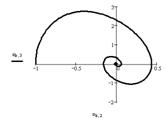
Рис. 1. Фазовый портрет системы (4) при u = 0
![]()
![]()
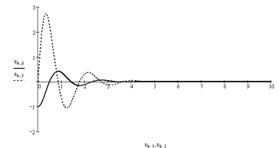
Рис. 2. Переходный режим системы (4) при u = 0
Матрица Якоби для системы с обратной связью имеет вид  . Производные
. Производные ![]() и
и ![]() в точке x = 0 можно получить с помощью методов интерполяции. Для случая линейной интерполяции и значений b1 = a2 = 12,7388, a1 = 2,2165 получим матрицу
в точке x = 0 можно получить с помощью методов интерполяции. Для случая линейной интерполяции и значений b1 = a2 = 12,7388, a1 = 2,2165 получим матрицу ![]() . Тогда характеристический многочлен, соответствующий этой матрице, имеет вид
. Тогда характеристический многочлен, соответствующий этой матрице, имеет вид ![]() . В этом случае запас устойчивости системы (3) равен = 15,9236, = 6,4024.
. В этом случае запас устойчивости системы (3) равен = 15,9236, = 6,4024.
Дополнительное подпространство определим равенством x2 = 0. В этом случае запас устойчивости не определен.
При u ¹ 0 система (4) является замкнутой и имеет устойчивый фокус (рис. 3).
![]()
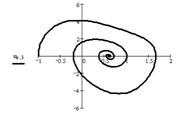
Рис. 3. Фазовый портрет системы (4) при u ¹ 0
Область устойчивости для замкнутой системы увеличена по сравнению с областью устойчивости для открытой системы (рис. 1). Рис. 4 соответствует переходному режиму замкнутой системы. Рис. 1–4 получены с помощью интегрированной системы компьютерной математики Mathcad.
![]()
![]()
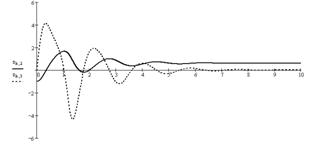
Рис. 4. Переходный режим системы (4) при u ¹ 0
Системы, аналогичные системе (3), рассматривались в [3].
5. Выводы
Проведенное в настоящей работе исследование устойчивости и компьютерное моделирование системы c логическим регулятором позволяет делать выводы о запасе устойчивости с помощью критерия Ляпунова и бифуркационной картины поля состояний системы. Полученные результаты могут быть использованы при решении задач, связанных с конструированием и совершенствованием технических систем управления.
Работа поддержана РФФИ (проект № 10-08-00826-а).
Литература
1. Пегат А. Нечеткое моделирование и управление. М.: БИНОМ. Лаборатория знаний, 2009.
2. Borne P., Dieulot J.-Y. Fuzzy systems and controllers: Lyapunov tools for a regionwise approach // Nonlinear Analysis. 2005. V. 63. P. 653–665.
3. Driankov D., Hellendorm H., Reich Frank M. An introduction to fuzzy control. – Berlin: Springer, 1996.
4. Braae M., Rutherford D. A. Selection of parameters for a fuzzy logic controller // Fuzzy Sets and Systems. 1979. V. 2. P. 185–199.
5. Масина О. Н., Дружинина О. В. Моделирование и анализ устойчивости некоторых классов систем управления. М.: ВЦ РАН, 2011.
STABILITY RESEARCH AND COMPUTER MODELING OF SYSTEM WITH LOGIC CONTROLLER
Druzhinina O. V., Masina O. N.
Dorodnicyn Computing Center of RAS, *****@***ru,
Yelets State University named after I. A. Bunin, *****@***ru
Improvement of the first Lyapunov method of stability research for system with logic controller is puter modeling is spent and phase portraits. of two-dimensional system are constructed.
Кеу words – stability, system of control, logic controller, first Lyapunov method, bifurcation.
