

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Метрология цифровых измерений.. Error! Bookmark not defined.
1.1. Понятие «измерение». 7
1.2. Измерительная информация и средства измерений. 7
1.3. Цифровые измерительные системы и их компоненты.. 11
1.4. Машинное представление цифровых результатов измерений.....................................................................................................12
1.5. Хранение и передача результатов измерений в цифровых измерительных системах 13
2.1. Датчики. 16
2.2. Передача измерительных сигналов. 17
2.3. Цифровые измерения. 15
2.4. Характеристики датчиков. 19
2.4.1. Погрешность, точность и нелинейность. 19
2.4.2. Статические характеристики датчиков. 22
Accuracy – точность – täpsus
Bias – сдвиг – nihutatus, nihe
Calibration – поверка – taatlus
Disturbance – возмущения – häirimine
Drift – дрейф – triiv
Linearity – линейность - lineaarsus
Mean error - средняя ошибка – keskmine viga
Mean quadratic error - среднеквадратичная ошибка - eksperimentaalne standardhälbe
Мeasurement error - погрешность (ошибка) измерения - mõõtehälbe
Noise – шум – müra
Reading offset - смещение показаний – näitude kalduvus
Repeatability – повторяемость – korduvus
Reproducibility – воспроизводимость – korratavus, taastootmisvõime
Resolution – разрешение – eraldus
Sensitivity – чувствительность – tundlikkus
Standard deviation - стандартное отклонение - standarthälbe
[Un] precision – погрешность – hälbe
Static gain - статическое усиление – staatiline võimendus
Operating range – рабочий диапазон – töö- ehk mõõtevahemik
Variance – разброс – lahknevus
Real-time mode - режим реального времени – reaalajas töörežiim
Sensor – чувствительный элемент, первичный измерительный преобразователь, сенсор – tajur, tundlik element, sensor
1. Digitaalmõõtmiste metroloogia
Tehnilise protsessi juhtimine erineb mõõtetulemuste tavalisest töötlemisest. Siinkohas andmete töötlemine järgneb otseselt ja sõltuvalt toimunud juhtumustest välis maailmas ehk protsessis. Digitaalne süsteem peab külaldaselt reageerima välisjuhtumitele ning alaliselt töötlema sisendandmete voog, kuskohas tavaliselt ei ole võimalust muuta nende hulga ega saabumse kiiruse.
Joonis 1.1. Arvuti kaasamine protsessi juhtimiseks
Внешняя среда – väliskeskkond, физический/технический процесс – füüsikaline/tehniline protsess, ввод сырья, энергии – toormaterjali, energia sisestus, выход продукта, энергии – toodangu, energia väljumine, ввод, вывод информации – info - sisend ehk väljund, компьютер –arvuti.
Üheajaliselt võimalikult on vajalik ka teiste opertsioonide teostamine, näiteks infovahetus operaatoriga, andmete kuvamine monitoorile, signaalidele reageerimine. Selline andmete töötlemise töörežiim osutus nii tähtseks, et sai nimetuse – töörežiim reaalajas ehk real-time mode.
Kõikides juhtimissüsteemides on ühesugused funktionaalplokid:
- Andmete kogumine,
- Andmete vahetamine teiste kontrolleritega ja arvutitega,
- Opertiivne koostöö inimesega-operaatoriga.
Üldjuhul füüsikalise ehk tehnilise protsessi digitaalne juhtimissüsteem koosneb jägmistest komponenditest joonis 1.2:
- Juhtimiselement (управляющего элемента);
- Info vahetuskanalid (каналов обмена информацией);
- Analoog – digitalmuundurid ADM ja digitaal-analoogmuundurid DAM (аналого-цифровых и цифро-аналоговых преобразователей (АЦП и ЦАП);
- Täitemehhanismid ja andurid (датчиков и исполнительных механизмов);
-  Füsikaline ehk tehniline protsess (собственно физического/технического процесса).
Füsikaline ehk tehniline protsess (собственно физического/технического процесса).
Joonis 1.2 Digitaalse juhtimissüsteemi põhiline struktuur
Kontrolleri sidumiseks protsessiga kasutatakse mitmeid tehnoloogijat. Mõõtmised ja andurite tehnoloogijad on kõige tähtsamad osad digitaaljuhtimises.
Andurid on vahendid mitteelektriliste suuruste muundamiseks elektriliseks suuruseks, seega siis analoogpingeks või analoogvooluks või elektriimpulsside sageduseks või nende arvuks.
Edasi järgneb saadud elektrilise suuruse mõõtmine. Nii on tänasel maailma tehnoloogilise arengu etapil kõige mugavam mitteelektrilisi suurusi mõõta.
Mitteelektrilisi suurusi, mida on vaja mõõta, on muidugi arutu hulk. Seeparast on ülimalt palju välja töötatud ka igasuguseid erinevaid andureid, toimub nende pidev täiustamine ja uute tüüpidegi leiutamine.
Väga levinud on näiteks transformaatorid või drosselid, mille magnetsüdamikus on muudetava laiusega õhupilu. Selle õhupilu laiust muudab mingi mehhanismi liikuv detail, mille nihet on vaja mõõta. Elektriskeem selle trafo või drosseliga ehitatakse nii ules, et lülituse vahelduv väljundpinge on määratud mõõdetava nihkega. Nii saab mõõta mehaanilisi nihkeid väga laias vahemikus alates ülivaikestest nihetest.
Analoogsed nihkeandurid saab ehitada ules ka kahe uksteise suhtes nihkuva metallplaadi vahelise mahtuvuse mõõtmisele.
Suhteliselt suurte deformatsioonide mõõtmisel naiteks ehituskonstruktsioonides kasutatakse
nn. tensoandureid, milles metalltraadi või pooljuhtkile takistus muutub konstruktsiooni deformatsiooni toimel.
Üsna primitiivselt on lahendatav elektriimpulsside genereerimine ja loendamine mootorite pöörlemiskiiruse või sooritatud pöörete arvu määramiseks, samuti mitmesuguste tiivikute poolt sooritatud pöörete arvu määramiseks vedelike ja gaaside liikumiskiiruse ja kulu (äratarbitud
koguse) mõõtmiseks.
Temperatuuri mõõtmiseks saab kasutada pooljuhtsiirete vastuvoolu, termoelementide termoelektromotoorjou, metalltraadi takistuse jm. muutumist ümbritseva keskkonna temperatuuri muutuste mõjul.
Kvartskristall annab meile palju voimalusi mitmesuguste mehaaniliste pingete (tõmme, surve, vääne, paine) ja vastavate väikeste deformatsioonide mõõtmiseks elektrilisel teel. Nimelt ilmuvad mehaaniliselt pingestatud kvartskristalli pinnale elektrilaengud. Elektroonikud peavad oskama neid moota. Ülesanne pole lihtne, sest kvarts on hea isolaator, ja laenguid tema pinnal või pinget tema tahkude vahel on üsna tülikas mõõta.
Fototundlikud elektronseadised võimaldavad mõõta valguskiirgust ja nende kaudu ka kiirgavate objektide temperatuuri.
Hall'i andur - pooljuhtkristall, millest ruumilise telje x suunas lastakse labi elektrivool, ruumilise telje y suunas juhitakse temasse magnetvali ning ruumilise telje z sihis tekib tema tahkude vahele väike pinge, mis on vordeline x-telje suunalise voolu ning y-telje suunalise magnetvalja korrutisega. Nii saab mõõta magnetvalja tugevust.
Kiires arenguetapis on praegu igasuguste keemiliste ja biokeemiliste toimete, ainete äratundmise jmt. väga keerukate ning segaste asjade elektrilise väljundiga andurite loomine.
Andurid peavad täpselt peegeldama tehnoloogilises protsessis muutuvaid füüsikalised suuruseid nii statsionaarses kui üleminekuprotsessis. Mõõteseadmed, mis tagavad signaalid „siselülitatud/ väljalülitatud“, nimetatakse binaaranduritega.
Andurite, ühtivkontrolleri ja taitevseadmete väljundsignaalid peavad olema ühtlustatud mõõteseadme sisendsignaaliga ja kontrolleri kasutajaliidega (interface). Selles mõttes on väga vajalik ette võtta kaitsemeetmed elektriliste häirete vastu, mis moonutavad anduri signaali.
Signaali liigi – voolu, pinge, valguskiirgus – valitakse sõltuvalt häirete iseloomust.
Kinnise juhtimissüsteemi korral mõõdetakse protsessis muutuvad suurused: tempetratuur, rõhk, kulu; ning nende määratud väärtused ei pea muutuma juhul kui tekivad välishäired. Kinnises süsteemis need ülesanned täitab kontroller PLC. Jühtimissüsteem peab olema võimeline toime tulema kõikide probleemidega, mis võivad esineda üksikute elementide ühendamisel süsteemisse.
Mõõdetav PLC anduriga juhitav suurus PV muundakse elektriliseks suuruseks, mis toimetakse mõõteseadmesse PLC selle juhtimiseks.
Vastavalt DIN 19226 kinnised juhtimissüsteemid on sellised süsteemid, kus juhitav suurus PV on pidevalt jälgitav ja võrreldav antud muutuva suuruse väärtusega (PV). Sõltuvalt võrdluse tulemusest süsteemi sisendsuurus mõjutab väljundsuuruse reguleerimist kuni antud muutuva suuruse väärtuseni (PV) vaatamata kõigite häirete mõjumisele.
Real - time mode juhtimissüsteemid peavad arvestama võimalikuga lubatud mõõtehälbega, et tagada süsteemi töökindluse ( isegi kui esinevad softi ja seadmete vead).
1.2. Mõõtmise mõiste
Mõõtmine on ekperimentaalselt tehniliste seadmete abil füüsikalise suuruse väärtuse määramine.
Standardi EVS 758:2009 kohaselt mõõtmine on eksperimentaalne menetlus, millega saadakse üks või mitu väärtust, mida saab põhjendatult omistada suurusele.
Selles mõistes on kajastatud:
- Füüsikaline suurus
- Menetluste kogum mõõtesuuruse mõõtühiku hoidva mõõtevahendi kasutamisel
- Menetluste kogum, mis tagab mõõtesuuruse seostamist mõõtühikuga
- Mõõtühiku väärtuse saamine
Mõõtetulemusega peab olema määratud teatud täpsusega ratsionaalarv. Juhul kui toimub füüsilise objekti või protsessi järjekestva omaduse muundamine diskreetseks ja selle analoog-digitaalse muudamise tulemusena mõõtetulemus on väljendatud teatud täpsusega ratsionaalarvude kogumiga, siis loetakse, et mõõtmise protsess on lõpetatud. Digitaaltulemuse järgnevad muundamised on juba arvutusprotsess vaid mitte mõõtmise protsess.
1.3. Mõõte informatsioon ja mõõteseadmed
Kaasaegne mõõtevahend – on tehniline vahend, mis on ette nähtud mõõtmiseks, mis kogu kasutusaja jooksul esitab püsivalt kindlalt liiki suurust, kusjuures suurusele on omistatud väärtus teatud mõõtetäpsusega.
Füüsikalise suuruse arvväärtus ei ole mõõtetulemuse esitamise üksainus moodus.
Mõõteinfo on laiem termin, mille all mõistetakse nii mõõtetulemuse arvväärtused kui samuti teises vormis – signaal, kood jm.
Koodid võivad olla binaar-, binaar-detsimaal ja muud.
Esmane mõõtevahend on mõõtemuundur (andur) – mõõtmisel kasutatav seadis, mis annab sisensuurusega kindlaksmääratud soses oleva väljunsuuruse. Näiteks, temopaar, voolutrafo, mehaanilise pinge mõõtemuundur, pH elektrood, Bourdoni toru, bimetallriba.
Esmase mõõtevahendi mõõtetulemus on mõõtesignaal.
Mõõtesüsteem on komplekt ühest või mitmest mõõtevahenditest ja sageli muudest seadmetest (mis asuvad kontrollitava objekti erinevates kohtades), reaktiivid ja abivarustus sealhulgas, mis on koostatud ja seadistatud teatud liiki suuruste kindlsaae vahemikku jäävate mõõdiste saamiseks.
Sõltuvalt mõõtesüsteemide eesmärgist need eristatakse järgmiselt:
- Informatsioonmõõtesüsteemid
- Kontrollmõõtesüsteemid
- Juhtimismõõtesüsteemid
Mõõtesüsteemi määramisel ei erista mõõtevahendid ja teised tehnilised seadised. Kõik need seadised kasutatakse mõõtmise eesmärgiga.
Seega mõõtesüsteem on tehniline seadis, mis on ette nähtud mõõtmiste teostamiseks ja üldjuhul on mõõteseadmete, mõõtemuundurite (sh. signaalide ühilduvuse seadised), sideliinide, digitaal ja analoogarvutusseadiste, mis on ühendatud ühe algoritmi järgi, kogum. Seadiste kogum on ette nähtud objekti seisukorra andmete automaatselt saamiseks mõõtesuuruse mõõdiste muundamise teel, kuskohas mõõtesuurus pidevalt muutub ajas. Mõõtesüsteemis toimub mõõtetulemuste töötlemine, registreerimine, kuvamine; sisendandmete (signaalide) muundamine süsteemi väljunsignaalideks.
Mõõtesüsteemi iseloomulikud omadused on järgmised:
- Tehniliste mõõteseadiste asetamine kontrollitava objekti erinevates kohtades,
- Andmete saamine mitmete mõõtemuundamise teel, kuskohas mõõtesuusused muutuvad ajalisel ning on jaotatud ruumiliselt.
Sellise liiki info integreerimiseks on vaja tagada info säilimise, edastamise, töötlemise, kuvamise, registreeimise, dokumenteerimise ja levimise.
Joonisel 1.3 on toodud tüüpiline mõõtesüsteemi skeem.
Siit selgub, et suuremas mõõteskeemi osas tegeldakse mõõtesignaalide analoogmuundamistega ja ainult mõõteskeemi teises lõpposas ADM väljundil esinevad füüsikaliste suuruste vaheväärtused digitaalkoodi näol. Digitaalmõõtetulemused saavutakse mõõtesüsteemi lõppkomponendis – digitaalses arvutuskomponendis.
Digitaalarvutusseadises toimub ADM-test koodide vastuvõtt reaalajas ja nende diskreetne töötlemine nõutava täpsusega vastavas andmete formaadis.
 |
Joonis 1.3. Mõõteskeemi struktuur.
Датчик – andur, линия связи – sideliin, измерительный преобразователь – mõõtemuundur, измерительный коммутатор – mõõtekommutaator многоканальный измерительный преобразователь – mitme kanaliga mõõtemuundur, АЦП – analoogdigitaalmuundur ADM, цифровой вычислительный компонент – digitaalarvutuskomponent, первая часть измерительной системы – mõõtesüsteemi esimene osa, вторая часть измерительной системы – mõõtesüsteemi teine osa.
Selline mõõtesüsteemi struktuur on vähesel määral seotud ruumiliselt, kuid suurel määral on seotud ajaliselt. Siinjuures süsteemi ühe komponendi reaalajas väljundinfo peab olema töödeltud mõõteahela järgmise skeemi komponendiga. Analoog - või digitaalinfo kauane säilimine ühes või teises süsteemi mõõtekomponendis ( v. a. digitaalarvutuskomponendis) ei ole võimalik.
Selles mõõtesüsteemis kõik toimuvad skeemi komponendites operatsioonid (mõõte-, side-, arvutus-) on mõõteprotsessi koostisosa.
Ühe skeemi komponendi (isegi sideliini) häire automaatselt viib eksimõõtetulemusele ehk eksitusele (prohmakas).
Vaatamata sellele, et mõõtesüsteemis on ruumiliselt ja konstruktiivselt ja fuktsionaalselt eraldatud erineva eesmärgiga komponendid, mõõtesüsteemi vaadeldakse ühismõõteseadmena. Selline mõõtesüsteem oma metroloogilisest olemusest on mõõtevahend, mis on toodud nagu toode ( nt. Soojusarvesti). Sellised mõõtesüsteemid ei ole digitaalmõõtesüsteemid, sest digitaalmõõtetulemus kujundatakse mitte mõõtesüsteemi sees vaid selle väljundil.
On sellised digitaalmõõtesüsteemid, kus kasutatakse esmased mõõtemuundurid digitaalväljundiga ning andmebaasi kauakestva säilimisega mõõtekohas. Sell juhul mõõtesüsteemid on juba vähesel määral seotud nii ruumiliselt, kui ajaliselt. Esimese astme andmebaasi juurdepääs on võimalik igal ajal ning andmete säilimine mõõtekohas ja nende moonutamata kasutamine süsteemis teise astme töötletmiseks on tagatud.
Mõõtesüsteemi tähtsam osa on mõõtekanalid. Mõõtekanal on jadamisi ühendatud tehniliste seadiste ahel mõõteinfo katkestamatu läbimisel sisendilt väljundini ning on ette nähtud ühe füüsikalise suuruse mõõtmiseks. Mõõteinfo on analoosignaal (vool, pinge).
1.4. Digitaalmõõtesüsteemid ja nende komponendid
Mikroprotsessormõõtesüssteemides otsemõõtmised moodustavad väikse osa kogu mõõtesuuruse arvväärtuse arvutusprotsessist. Peamine protsessi osa on andmete säilimine, edastamine, mõõtetulemuste töötlemine ja esitmine arvväärtusena. Need operatsioonid metroloogias vaadeldakse kaudsete mõõtmistega.
Sel juhul, kus mõõte - , arvutus - jm. operatsioonid toimuvad mõõtevahendis, eristada neid ei ole võimalik. Mõõtevahendi väljundil ekraanil kuvatakse digitaalmõõtetulemus. Tähtis on selle täpsus (usaldatavus).
Digitaalmõõtesüsteemides mõõtekomponendid ühendatakse digitaalmõõtekanalidesse ja kõik teised tehnilised seadised vaadeldakse eriseadmetena ( nt. Kontrollerid) või universaalsedmetena – mittemõõtekomponenditena ( nt. Arvutid).
Mõõtesüsteemi mõõtevahenditeks on ainult digitaalmõõtekanalid ja nende koostisosad – mõõtekomponendid.
Mittemõõtekomponendid võivad halvendama mõõtelõpptulemuse enda diskreetse töötlemise protsessis. On ilmne, et andmete töötlemisele tuleb esitada määratud täpsuse nõued. Näiteks, kui arvutusmuundamiste täpsus on 3-5 korda suurem mõõtetäpsust, siis lisahälvetega võib arvesse mitte võtma.
В отдельных случаях неизмерительные компоненты могут не только не ухудшить, но даже улучшить точность результатов измерений (например, при статистической цифровой обработке случайных результатов многократных измерений).
Требования к точности измерений и вычислений и способы их обеспечения принципиально различны. Процессы измерений и вычислений имеют свои особенности: первые представляют собой сложные процессы аналогового сравнения измеряемой величины с единицей измерения, а вторые - элементарные арифметические действия над рациональными числами. Для повышения точности аналоговых операций необходимы серьёзные технологические достижения, а для повышения точности цифровых операций достаточно всего лишь увеличить разрядность чисел (это элементарно делается в устройстве сбора и обработки данных и компьютере).
Например, для двоичных чисел, в случае представления их в формате с плавающей запятой, дополнительный байт мантиссы дает возможность увеличить точность представления числа в 256 (28) раз. Такое существенное и при этом легко реализуемое повышение точности невозможно при аналоговых измерениях. Если относительная погрешность аналоговых измерений составляет 0,1%, то для вычислителя, на вход которого поступают числа такой точности, без особых проблем можно обеспечить точность их промежуточного представления и обработки в 100 раз больше (для этого потребуется всего лишь двухбайтовая мантисса). На выходе вычислителя, округлив результат до точности исходных чисел как результатов измерений, их точность ухудшилась не более чем на один процент от исходного значения точности [2].
1.5. Машинное представление цифровых результатов измерений
Представление цифрового результата измерений в дискретной машинной сетке любого цифрового элемента (контроллера и компьютера) цифровой измерительной системы возможно в одном из двух форматов [2]:
· в формате числа с фиксированной запятой;
· в формате числа с плавающей запятой
![]() (1)
(1)
где M=(0, a-1…a-m) – нормализованная мантисса (a-1≠0) в R- ичной системе счисления с m значащими цифрами, а B=±br…b2b1 – целочисленный порядок цисла (bi ≤ R-1) [5].
Известные методы вычислительной техники позволяют достаточно просто обеспечить, в отличие от аналоговых технологий, любую требуемую точность представления и обработки цифровых результатов измерений определённой значности. Тем самым в цифровых измерительных системах гарантируется сохранение точности результатов измерений не только на выходе цифровых измерительных каналов, но и после различных промежуточных цифровых преобразований на выходе измерительных систем [2].
1.6. Хранение и передача результатов измерений в цифровых измерительных системах
В цифровых измерительных системах результаты измерений не только подвергаются той или иной арифметической обработке, но хранятся в цифровой памяти и передаются по линиям или каналам связи между разными компонентами системы для выполнения в них различных операций.
Точность машинного представления (хранения) этих данных на входе системы должна соответствовать точности этих данных, то есть быть не ниже её. Точность представления промежуточных данных зависит от вида и количества выполняемых арифметических операций и может быть определена стандартными методами вычислительной техники [2].
Передача данных в цифровых системах производится по цифровым интерфейсам (например, по интерфейсам физического уровня RS-232, RS - 485) с протоколами, имеющими, как правило, многоуровневую архитектуру. На каждом уровне обеспечивается защита данных от искажений за счёт применения дополнительных контрольных разрядов и защитных кодов. В процессе приёма данных выполняется их контроль на наличие ошибок, а также используются другие методы обеспечения целостности данных. В том случае когда измерительные данные накапливаются и хранятся длительное время в точке измерения (в цифровой памяти средства измерений), одним из наиболее эффективных методов обеспечения их достоверности при передаче в другие цифровые компоненты системы является метод повторных запросов и сравнения их результатов.
Операции арифметической обработки, хранения и передачи данных в цифровых измерительных системах обладают высокой стабильностью во времени и высокой достоверностью, которую, как и точность вычислений, можно повысить за счёт дополнительной обработки. Если для средств измерений метрология использует понятие межповерочного интервала, что связано с меняющейся во времени метрологической стабильностью этих средств, то для цифровых неизмерительных компонентов их метрологическая стабильность постоянна во времени в течение всего срока службы и поэтому не требует периодических поверок (межповерочный интервал равен сроку службы компонента) [2].
В современных цифровых измерительных системах почти все виды преобразований, данных за пределами измерительных каналов, выполняются в микропроцессорных неизмерительных компонентах (PLC и PC) программным путём. Для цифровых систем, если отлаженная программа обработки или передачи данных работает, то она работает всегда и одинаковым образом, пока работает соответствующее техническое средство. Программы «не ломаются» (хотя недоотлаженные программы и могут работать с ошибками, но это не является проблемой метрологии). Таким образом, долговременная стабильность цифровых компонентов достигается, в том числе, и за счёт их программного обеспечения.
1.7. Цифровые измерения
Цифровой результат измерения физической величины — значение величины, полученное путём её измерения, представленное в позиционной системе счисления в виде рационального числа определённого формата с известной точностью и достоверной вероятностью [6].
В современных технических системах используются преимущественно двоичная, восьмеричная, шестнадцатеричная и десятичная (или двоично-десятичная) системы счисления и два формата представления рациональных чисел: с фиксированной и с плавающей запятой (точкой) [6].
Цифровой результат измерения может храниться в регистре, в памяти (базе данных), передаваться по интерфейсу, отображаться на табло, выдаваться на печать, на другие аудио-и видеосредства отображения и документирования данных [6].
Цифровое измерение физической величины - измерение, результат которого является цифровым результатом [6].
Любое измерение оканчивается там и тогда, где и когда появляется цифровой результат измерения, независимо от его дальнейшего использования. Операции последующих преобразований цифровых результатов измерений не являются измерением, а относятся к операциям неизмерительного назначения (хранения, передачи, вычисления и т. п.) [6].
Цифровое средство измерений — средство измерений, выполняющее цифровое измерение.
Цифровой измерительный канал — цепь последовательно соединённых средств измерений, образующих путь прохождения измерительной информации от входа цепи к выходу и предназначенных для измерения одной физической величины с представлением результатов её измерений на выходе измерительного канала в цифровом виде [6].
Цифровая измерительная система — совокупность цифровых измерительных каналов и иных технических средств неизмерительного назначения, объединённых единым алгоритмом функционирования, предназначенная для измерений, а также выполнения иных операций неизмерительного назначения с целью определения значений одной или нескольких физических величин или их функций.
В цифровой измерительной системе все измерительные каналы являются цифровыми.
К техническим средствам неизмерительного назначения относятся средства, не выполняющие измерений. Такими средствами, в частности, являются компьютер (в том случае, если он не реализует с помощью встроенных в него технических средств аналого-цифровых и дискретно-цифровых измерительных преобразований входных сигналов), цифровой накопитель (цифровая память), монитор, принтер, модем, каналы и линии связи и другие устройства.
1.8. Датчики
Измерительные приборы в большинстве своем состоят из датчика (измерительного преобразователя), преобразователя сигнала в аналоговую или цифровую форму и устройства интерфейса прибора с компьютером и контроллером. Поэтому появляются дополнительные возможности, например статистическая обработка результатов, возможность проведения измерений в динамическом режиме, а также многие сервисные возможности в зависимости от программного обеспечения процедуры измерений. Компьютер и контроллер может также управлять процессом измерений.
Измерительное устройство или датчик состоит из двух частей – измерительной головки и преобразователя. Выходной сигнал преобразователя как правило электрический, однако часто встречаются и пневматические датчики. Главное преимущество электрических датчиков заключается в гибкости и разнообразии способов обработки сигнала. Электрический сигнал можно передавать на большие расстояния с очень малыми затратами энергии.

Рис.2.1 Составные элементы датчика
Классификация датчиков:
1. аналоговые датчики (вырабатывают аналоговый сигнал);
2. цифровые датчики (генерируют последовательность импульсов или двоичное слово);
3. бинарные датчики (вырабатывают сигнал только двух уровней: «включено / выключено», то есть 0 или 1).
1.9. Передача измерительных сигналов
Аналоговые сигналы, вырабатываемые измерительными устройствами, обычно необходимо так или иначе преобразовать прежде, чем ввести их в компьютер. При передаче аналоговых сигналов существуют некоторые проблемы, обусловленные электрическими возмущениями. Сигнал, который передается от датчика по электрическому проводнику, может подвергнуться зашумлению под влиянием среды из-за нежелательных связей резистивного, индуктивного или емкостного характера. Этот шум может исказить исходный сигнал.
Сигналы, вырабатываемые датчиками, имеют низкий уровень, поэтому для дальнейшей передачи их нужно обработать и усилить. Уровни сигнала и импедансы выхода датчика, кабеля и входа компьютера должны соответствовать друг другу. Обработка сигнала для достижения этого соответствия называется согласованием сигнала. Уровень выходного сигнала датчика должен быть достаточно высок, с другой – входной импеданс компьютера должен быть значительно больше по сравнению с выходным импедансом системы «датчик – измерительный преобразователь». Для согласования уровней сигналов и величин импедансов между выходом датчика и входом компьютера устанавливаются операционные усилители с обратной связью [5].
Еще одной важной практической проблемой являются наводки. Любое электронное устройство способствует возникновению электрических возмущений. Если две электрические цепи по тем или иным причинам расположены недалеко друг от друга, то изменение тока или напряжения в одной цепи вызывает также изменения тока и напряжения в другой. Проблемы с электрическими наводками можно решить с помощью экранирования цепей и заземления. Выбор способа передачи сигнала (напряжение, ток или свет) зависит от устойчивости к наводкам и шумам.
Чтобы создать для электронного оборудования среду, максимально свободную от наводок, постоянно проводится множество исследований и разработок. Их задачей является достижение электромагнитной совместимости (ЕМС) в рамках электрических цепей, а также между различными цепями и системами. Электрический прибор должен быть нечувствительным к внешним помехам и не должен генерировать помех, которые могут оказать влияние на другое оборудование [5].
Для уменьшения влияния электромагнитных наводок на измерительное оборудование нужно снизить интенсивность источника помех и уменьшить другие помехообразующие факторы (гальваническая связь, расстояние до источника помех, частотный спектр помех).
Для уменьшения влияния емкостных связей необходимо: применять экранированный кабель и минимизировать длину неэкранированных участков на концах кабеля. Влияние магнитных связей можно уменьшить используя витой кабель (уменьшается площадь магнитного потока), подключая несколько датчиков, использовать для кажного из них свою витую пару, прокладывая силовые и сигнальные кабели отдельно, пересечение низковольтных и высоковольтных кабелей под прямым углом [5].
1.10. Характеристики датчиков
1.10.1. Погрешность, точность и нелинейность
Точность (accuracy) определяет разницу между измеренной и действительной величиной; она может быть отнесена к датчику в целом или к конкретному его показанию. Разрешение (resolution) – это наименьшее отклонение измеряемой величины, которое может быть зафиксированно и отражено датчиком. Точность датчика зависит не только от его аппаратной части, но и от остальных элементов измерительного комплекса. Погрешность (ошибка) измерения (measurement error) определяется как разница между измеренной и действительной величинами. Поскольку действительная величина неизвестна, в произвольном случае оценку точности можно сделать на основе эталонных измерений или углубленного анализа данных [5].
Ошибки измерения можно классифицировать и, соответственно, моделировать как детерминированные (или систематические) и случайные (или стохастические). Детерминированные ошибки связаны с неисправностью датчика, нарушением условий его применения или процедуры измерений. Эти ошибки повторяются при каждом измерении. Типичная систематическая ошибка — это смещение показаний (reading offset) или сдвиг (bias). В принципе, систематические ошибки устраняются при поверках (calibration). Случайные ошибки, напротив, могут иметь самое разное происхождение. В большинстве случаев — это влияние окружающей среды (температуры, влажности, электрических наводок и т. п.). Если причины случайных ошибок известны, то эти ошибки можно компенсировать. Часто влияние возмущений характеризуют количественно такими параметрами, как средняя ошибка (mean error), среднеквадратичная ошибка (mean quadratic error) или стандартное отклонение (standard deviation) и разброс (variance) либо погрешность ([un] precision) [5].
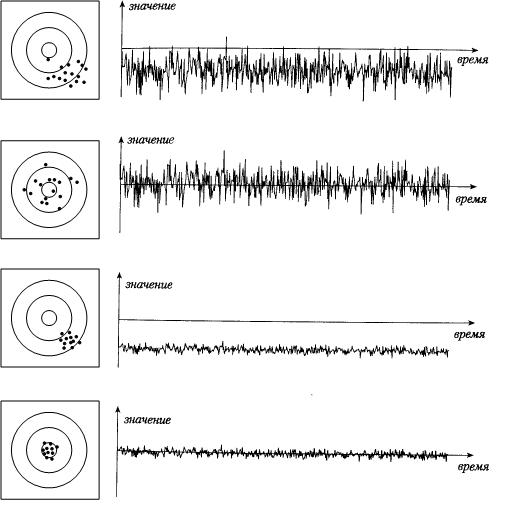
Рис. 2.2 Иллюстрация смещения, погрешности и точности
Разница между систематической и случайной ошибками иллюстрируется рис. 2.2. Центр каждой мишени представляет собой истинное значение измеряемой величины, а каждая точка — это измерение. Сумма измерений характеризуется смещением и разбросом. Для хорошей точности обе характеристики должны быть малы.
На рис. 2.2. а и в представлены смещенные результаты. Стандартное отклонение или разброс результатов отдельных измерений является мерой погрешности. Датчик c хорошей повторяемостью результата (или малой случайной ошибкой) имеет, очевидно, хорошую случайную погрешность, но не обязательно дает правильную выходную величину, поскольку сдвиг может существенно исказить результат, т. е. точность датчика невелика. Результаты измерений на рис. 2.2. б и г имеют малую погрешность, но только результат, показанный на рис. 2.2. г, является точным.
Центр каждой мишени представляет собой истинное значение измеряемой величины, а точки — результат измерений. На диаграммах справа истинная величина представлена прямой линией, на которую наложены результаты измерений. Точность измерения зависит как от смещения, так и от разброса [5]:
а - большое смещение + большой разброс = низкая точность;
б - малое смещение + большой разброс = низкая точность;
в - большое смещение + малый разброс = низкая точность;
г - малое смещение + малый разброс = высокая точность.
1.10.2. Статические характеристики датчиков
Статические характеристики датчика показывают, насколько корректно выход датчика отражает измеряемую величину спустя некоторое время после ее изменения, когда выходной сигнал установился на новое значение. Важными статическими параметрами являются: чувствительность, разрешающая способность или разрешение, линейность, дрейф нуля и полный дрейф, рабочий диапазон, повторяемость и воспроизводимость результата [5].
Чувствительность (sensitivity) датчика определяется как отношение величины выходного сигнала к единичной входной величине (для тонких измерительных технологий определение чувствительности может быть более сложным).
Разрешение (resolution) — это наименьшее изменение измеряемой величины, которое может быть зафиксировано и точно показано датчиком.
Lineaarsus – analüütiliselt ei ole kirjeldatav, kuid selle määratakse sõltuvalt anduri gradueerimisel saadud kõverast. Staatiline gradueerimiskõver näitab väljundsignaali sõltuvuse sissendsignaalist statsionaartingimustel. Selle kõvera kokkulangevus sirgjoonega määrab anduri lineaarsust. Maksimaalne hälbe lineaarsõltuvusest esitatakse protsentides.
Линейность (linearity) не описывается аналитически, а определяется исходя из градуировочной кривой датчика. Статическая градуировочная кривая показывает зависимость выходного сигнала от входного при стационарных условиях. Близость этой кривой к прямой линии и определяет степень линейности. Максимальное отклонение от линейной зависимости выражается в процентах.
Статическое усиление (static gain) или усиление по постоянному току (d. c. gain) — это коэффициент усиления датчика на очень низких частотах. Большой коэффициент усиления соответствует высокой чувствительности измерительного устройства.
Дрейф (drift) определяется как отклонение показаний датчика, когда измеряемая величина остается постоянной в течение длительного времени. Величина дрейфа может определяться при нулевом, максимальном или некотором промежуточном значении входного сигнала. При проверке дрейфа нуля измеряемая величина поддерживается на нулевом уровне или уровне, который соответствует нулевому выходному сигналу, а проверка дрейфа на максимуме выполняется при значении измеряемой величины, соответствующем верхнему пределу рабочего диапазона датчика. Дрейф датчика вызывается нестабильностью усилителя, изменением окружающих условий (например, температуры, давления, влажности или уровня вибраций), параметров электроснабжения или самого датчика (старение, выработка ресурса, нелинейность и т. д.).
Anduri töö- ehk mõõtevahemik on määratav anduri väljundsignaali minimaalse ja maksimaalse väärtustega.
Рабочий диапазон (operating range) датчика определяется допустимыми верхним и нижним пределами значения входной величины или уровня выходного сигнала.
Повторяемость (repeatability) характеризуется как отклонение между несколькими последовательными измерениями при заданном значении измеряемой величины в одинаковых условиях, в частности приближение к заданному значению должно происходить всегда и либо как нарастание, либо как убывание. Измерения должны быть выполнены за такой промежуток времени, чтобы не проявлялось влияние дрейфа. Повторяемость обычно выражается в процентах от рабочего диапазона.
Воспроизводимость (reproducibility) аналогична повторяемости, но требует большего интервала между измерениями. Между проверками на воспроизводимость датчик должен использоваться по назначению и, более того, может быть подвергнут калибровке. Воспроизводимость задается в виде процентов от рабочего диапазона, отнесенных к единице времени (например, месяцу).
