
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Изучение релейной системы позиционирования на основе прямоходного электромеханизма
Общие сведения
Состав МЭП Достоинства МЭП
1. Электродвигатель;
2. Винтовая передача;
3. Редуктор;
4. Узел ручного привода;
5. Блок концевых выключателей;
6. Датчик положения с унифицированным токовым выходом *
*наличие этого узла согласуется дополнительно
Хорошие массогабаритные показатели так, МЭП с номинальным усилием 5 кН имеет массу всего 27 кг, это облегчает монтаж и обслуживание МЭП на объекте и позволяет во многих случаях обойтись без грузоподъёмных механизмов.
Широкие компоновочные возможности
- рабочее положение МЭП 8 пространстве может быть любым;
- возможность шарнирной установки МЭП на основании с шарнирным закреплением конца штока на рабочем органе позволяет реализовать как прямолинейное, так и криволинейное перемещение рабочего органа.
Удобство нападки
возможность и удобство настройки зоны
рабочих перемещений штока.
Экономичность применения МЭП применение МЭП вместо пневмоцилиндров в целом ряде производств позволяет снизить эксплуатационные расходы, а также исключить затраты на приобретение компрессорных станций, подготовку воздуха и тд.
Высокая надежность в эксплуатации обусловлена простотой конструкции и применением высококачественных материалов.
Минимум технического обслуживания техническое обслуживание заключается 8 добавлении смазки один раз 8 год.
Основные конструктивные исполнения МЭП
Принцип действия МЭП
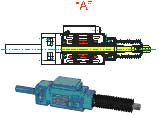
В МЭП исполнения «А» при подаче напряжения на электродвигатель ротор электродвигателя и скрепленная с ним через редуктор гайка винтовой передачи приходят во вращение, при этом винт, закрепленный своим концом на рабочем органе, совершает поступательное движение. Блок радиально-упорных подшипников воспринимает возникающие осевые усилия.
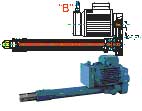
В МЭП исполнения «В» ротор электродвигателя через редуктор или зубчато-ременную передачу приводит во ращение винт винтовой пары. При этом гайка вместе со штоком, в котором она установлена, движется поступательно, перемещая рабочий орган.
Для ограничения хода винта используются концевые и путевые выключатели. Изменяя расположение путевых выключателем, можно ограничить с двух сторон любой участок рабочего хода винта.
Ручной привод позволяет при отсутствии электропитания перемещать рабочий орган вручную поворотом рукоятки. При работе электродвигателя рукоятка ручного привода неподвижна. Предусмотрена защита от внезапной подачи напряжения на электродвигатель в режиме работы ручным приводом.
Выводы от электродвигателя, концевых выключателей и датчика положения подключены к клеммникам или штепсельным разъемам, расположенным в коробке выводов. На внутренней стороне крышки коробки выводов закреплена пластинка со схемой внутренних
соединений всех элементов МЭП.
Для защиты винтовой передачи от внешних воздействий в МЭП исполнения "А" используются резиновые гофры, в МЭП исполнения "В" сальники. Механические упоры ограничивают перемещение штока МЭП при его втягивании или выдвижении.
Датчик положения формирует токовый сигнал, пропорциональный перемещению штока МЭП. Этот сигнал может быть использован как для индикации, так и для замыкания обратной связи в системе автоматического регулирования.
МЭП предназначены для осуществления перемещения рабочих органов запорно-регулирующей арматуры паро-, водо - и воздуховодов в системах автоматического регулирования или по командам аппаратов с пульта управления при следующих факторах окружающей среды:
-
В состав изделия входят:
- асинхронный электродвигатель;
- редуктор;
- привод ручной;
- устройство ограничения хода штока;
- устройство контроля положения штока.
Устройство и принцип действия
Конструктивная схема.
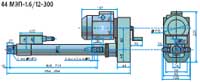
Направление вращения - реверсивное.
При вращении ротора по часовой стрелке, если смотреть со стороны наконечника поз.1, шток ПВГС 9 выдвигается из МЭП, а при вращении против часовой стрелки - входит внутрь МЭП.
Основные сборочные единицы: электродвигатель, редуктор, привод ручной, устройство ограничения хода штока и устройство контроля положения штока.
Электродвигатель
Электродвигатель трехфазный асинхронный короткозамкнутый 10 состоит из ротора, статора, корпус которого выполнен заодно с корпусом коробки выводов.
Коробка выводов состоит из блока зажимов и вводного устройства для ввода силового кабеля. Вводное устройство имеет штуцерное уплотнение, отверстия в котором выполняет заказчик.
Редуктор.
Редуктор служит для преобразования вращательного движения ротора в поступательное движение штока передачи "винт - гайка скольжения".
Редуктор состоит из передачи "винт - гайка скольжения", ременной передачи, двух подшипников 21, двух корпусов 8 , 22 и плиты 11.
Привод ручной
Привод ручной предназначен для перемещения штока ПВГС 9 вращением рукоятки 16 при отключении питания электродвигателя 10, а также при выполнении пуско-наладочных работ, что обеспечивается вращением винта ПВГС рукояткой 16 (через ременную передачу).
Сцепление рукоятки со шкивом 14 производится совмещением выступа рукоятки с пазом шкива. Рукоятка 16 поставляется в комплекте с МЭП.
Устройство ограничения хода штока.
Устройство ограничения хода штока предназначено для выключения цепей управления МЭП при конечных положениях (максимальном или минимальном ходе) штока ПВГС 9.
Элементами выключения цепей управления являются четыре микропереключателя 7 с маркировкой "S1","S2","S3" и "S4",расположенные на плечах рычага 6, четыре пружины 31, закрепленные на рычаге 6, а так же четыре упора 30, закрепленные во втулках коробки 4 (см. вид А).
Устройство контроля положения винта.
Устройство контроля положения штока ПВГС предназначено для преобразования перемещения штока ПВГС 9 в пропорциональный выходной токовый сигнал.
Устройство состоит из индуктивного преобразователя перемещения 36 и модуля нормировки 33 (вид А).
Индуктивный преобразователь перемещения 36 является бесконтактным индуктивным устройством с торцевой чувствительной поверхностью. При перемещении штока ПВГС изменяется зазор между пружиной 29 под воздействием нажима 32, закрепленного на рычаге 6, и торцевой чувствительной поверхностью преобразователя, что приводит к изменению токового сигнала преобразователя.
Модуль нормировки
Назначение.
Модуль нормировки предназначен для преобразования входного токового электрического сигнала в выходной токовый сигнал с функциями смещения, изменения коэффициента передачи и ограничения выходного сигнала. Модуль может эксплуатироваться как в составе механизма электрического прямоходного (МЭП) совместно с индуктивным преобразователем перемещения (ИПП), так и в составе иных устройств, при условии, что не нарушены правила эксплуатации, описанные в настоящем руководстве.
