

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 (2)
(2)
Областью определения данной функции является выражение rmin<l<r, где rmin – минимальное измеряемое расстояние лазерным сканером.
|
|
|
|

 (3)
(3)
|
|
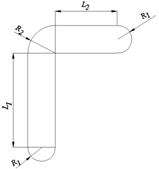
Рис.3.Нижняя граница изучаемой Г-образной призмы (а) и карьера (б).
В некоторых случаях встаёт вопрос о правомерности использования данной формулы: если значения L1 и L2 объекта приблизительно равны между собой, а также, если угол поворота сильно выполаживается. При совпадении этих двух условий форма объекта (склада, отвала) стремится к полусферической, а его нижняя граница приобретает очертания окружности. Опытным путём было установлено, что при соотношении ![]() использование формулы 1 приведёт к более точным результатам.
использование формулы 1 приведёт к более точным результатам.
При соотношении ![]() количество станций, определяемое по формуле 1 и по формуле 3 приблизительно одинаково. Если же разница в соотношении длин сторон превышает заявленный предел (1,6), то объект уже рассматривается как вытянутый и количество станций определяется по формуле 3.
количество станций, определяемое по формуле 1 и по формуле 3 приблизительно одинаково. Если же разница в соотношении длин сторон превышает заявленный предел (1,6), то объект уже рассматривается как вытянутый и количество станций определяется по формуле 3.
Использование формулы (3) позволяет определить число станций, необходимых для полного охвата нижней границы объекта в процессе съёмки с заданной точностью. Но эта формула составлялась на основе геометрически правильных фигур: прямоугольников и окружностей. На практике отвалы имеют сильно размытые границы, к тому же не учитывается тот факт, что поворот объективно не является четвёртой частью окружности. Подобные допущения вынуждают рассмотреть возможность введения коэффициента, который бы приближал реальное число станций к гипотетическим, посчитанным по формуле 3. В результате построения в программной среде AutoCAD моделей объектов различных размеров было выявлено, что подобный коэффициент приблизительно равен 0,9. Т. е. окончательное число станций равно![]() .
.
В отношении расстановки станций при сканировании песчаных карьеров, имеющих один уступ, геометрически схема определения их количества остаётся прежней (рис.1б). Соответственно, и формулы 1 и 2 не претерпевают изменений. В случае, если карьер имеет сложную форму, и его нижнюю границу можно условно разбить на прямоугольник и три полуокружности, как показано на рис. 3б), то формула 3 примет вид формулы 4.
(4)
Областью определения данной функции является выражение rmin<l<r.
При планировании съёмки верхней части отвала точки установки лазерного сканера относительно друг друга определяют, исходя из полноты охвата и их расположения относительно контура верхней части отвала и в целях безопасности наблюдателя на расстоянии не менее 20 м. Количество точек установки зависит от площади снимаемой верхней части отвала. Моделирование размещения точек установки лазерного сканера выявило следующую закономерность.
Учитывая, что геометрический параметр R(R1) является одним из параметров усечённого конуса (рис.1а), призмы с трапециевидным сечением (рис.2), Г-образной призмы (рис.3а), то по результатам моделирования были получены зависимости общего количества станций установки nO от параметра R. Так, для съёмки верхней части отвала, близкого по форме к усечённому конусу, nO определяется следующим образом:
при R≤r nO=n+1;
при r<R≤3r nO=2n-5;
при 3r<R≤4r nO=3n-15;
при 4r<R≤5r nO=4n-30;
при 5r<R≤6r nO=5n-45 и т. д.,
где n – число скан-позиций, определяемое по формуле 1.
Для отвалов, близких по форме к призме с трапециевидным сечением или Г-образной призме общее количество установок сканера nO определяется из следующей закономерности:
при R≤2r nO=2n-5;
при 2r<R≤3r nO=3n-15;
при 3r<R≤4r nO=4n-30;
при 4r<R≤5r nO=5n-45;
при 5r<R≤6r nO=6n-60 и т. д.,
где n – число скан-позиций, определяемое по формулам 2 для отвалов в форме призмы с трапециевидным сечением и 3 для отвалов в форме Г-образной призмы соответственно. Для последнего объекта в полученную схему следует вместо R подставлять R1.
При выполнении контрольных съёмок отдельных участков карьера, складов полезного ископаемого, а также при съёмке геометрических параметров конструктивных элементов зданий, сооружений, архитектурно-исторических памятников возникает задача выполнения этих работ с более высокой и определённой точностью. Для лазерно-сканирующих систем фазового типа измерения дальности (Imager 5006, FARO LS 880, Leica HDS 6000) погрешность съёмки (mc) зависит от дальности (радиуса) сканирования (r) и свойств отражающей способности поверхности снимаемого объекта (Iотр) - mc=f(r, Iотр). Эта зависимость приведена в технических паспортах этого типа лазерных сканеров. Следовательно, задавая радиусы съёмки при определённой отражающей способности поверхности снимаемого объекта, можно определить, какая им будет соответствовать погрешность съёмки. Затем, используя выбранный радиус съёмки в изложенном выше способе её оптимизации, можно запланировать съёмку упомянутых объектов с наперёд заданной погрешностью.
3.Обоснование точности определения объёма склада полезного ископаемого должно быть основано на аналитических зависимостях, полученных из моделирования измерительных процессов съёмок.
Известны следующие способы определения объёмов и массы породы и полезного ископаемого: способ горизонтальных сечений, способ вертикальных сечений, способ объёмной палетки и способ правильных геометрических фигур.
При использовании лазерно-сканирующих систем при съёмке складов полезного ископаемого (отвалов, насыпей и др.) происходит накопление погрешности. Причём наиболее полную оценку точностных параметров лазерно-сканирующей съемки можно сделать на примере определения объема. В этом случае, независимо от применяемой измерительной техники, определение объема разбивается на два процесса:
- собственно съемка объекта, объем которого надо определить, и моделирование снятой поверхности;
- определение объема путем вписывания элементарных объемов в пространство, ограниченное этой поверхностью.
Отсюда общая погрешность определения объема должна определяется с учетом закономерностей накопления погрешностей измерений внутри каждого из приведенных процессов.
 Закономерности накопления погрешностей анализировались на модели маркшейдерско-геодезических измерительных процессов тахеометрической съемки, с дискретным получением точек при съемке склада (отвала, насыпи). Измерительные процессы лазерно-сканирующими системами моделировались на базе модели измерительных процессов традиционной съемки путем увеличения плотности съемочных точек внутри этой базовой модели (рис.4). На полученной таким образом модели изучались закономерности накопления погрешностей измерений при тотальной съемке лазерно-сканирующими системами.
Закономерности накопления погрешностей анализировались на модели маркшейдерско-геодезических измерительных процессов тахеометрической съемки, с дискретным получением точек при съемке склада (отвала, насыпи). Измерительные процессы лазерно-сканирующими системами моделировались на базе модели измерительных процессов традиционной съемки путем увеличения плотности съемочных точек внутри этой базовой модели (рис.4). На полученной таким образом модели изучались закономерности накопления погрешностей измерений при тотальной съемке лазерно-сканирующими системами.
Запишем функцию определения объема склада в следующем виде:
Используя формулу средней квадратической погрешности оцениваемой функции, выраженную через средние квадратические погрешности аргументов, была получена формула средней квадратической погрешности определения объема склада MV:
![]()
где ![]() - площади сечений, i = 1, 2, 3, … , n;
- площади сечений, i = 1, 2, 3, … , n; ![]() - расстояния от границ склада полезного ископаемого до ближайших сечений и между сечениями, i = 1, 2, 3, … , N+1 (рис.4);
- расстояния от границ склада полезного ископаемого до ближайших сечений и между сечениями, i = 1, 2, 3, … , N+1 (рис.4); ![]() - средняя квадратическая ошибка определения площади;
- средняя квадратическая ошибка определения площади; ![]() - средняя квадратическая ошибка определения расстояния
- средняя квадратическая ошибка определения расстояния ![]() . Положим, что
. Положим, что ![]() и
и ![]() , тогда
, тогда

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
