
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Оглавление
Введение. 3
1. Развитие науки о структуре механизмов. 4
2. Структурный анализ механизма. 6
3.Определение геометрических размеров звеньев механизма. 8
4. Построение плана скоростей механизма. 11
5. Построение плана ускорений механизма. 14
6. Силовой расчёт механизма. 17
Заключение. 19
Список литературы.. 21
Введение
Структурный анализ и синтез является первичным этапом проектирования любой механической системы (механизмы, замкнутые и открытые кинематические цепи), который полностью предопределяет эффективность применения в разных областях техники.
Структурный анализ заключается в решении проблем установления параметров строения и числа степеней подвижности для выявления и определения путей устранения вредных избыточных связей в анализируемых схемах механизмов.
Структурный синтез заключается в создании структурных схем, обеспечивающих требуемое число степеней подвижности механизма, число изменяемых замкнутых контуров в его кинематической цепи, отсутствие избыточных связей и минимум числа звеньев цепи ) (W) (K). ~(n)
Проблема структурного синтеза новых механизмов заключается в определении требуемой номенклатуры звеньев проектируемого механизма и установлении требуемого набора простых и совмещенных шарниров для сборки из этих звеньев безызбыточных цепей с требуемым В качестве единой основы для решения этих проблем можно использовать рассматриваемый ниже на примерах табличный метод структурного анализа и синтеза на базе полученных расчетным путем по компьютерным программам «Универсальной структурной таблицы стандартных кодов правильного строения механизмов» и дополняющей ее «Полной таблицы стандартных наборов совмещенных шарниров», содержащих все возможные целочисленные решения структурных уравнений замкнутых кинематических цепей[1].
1. Развитие науки о структуре механизмов
В развитии науки о структуре механизмов можно выделить следующие 3 этапа.
Первый этап – включает установление в 1869 г. в его докладе «О параллелограммах» необходимого соотношения между числом звеньев и кинематических пар в плоских механизмах и опубликованную в 1883 г. работу М. Грюблера по представлению структуры кинематических цепей плоских механизмов в виде изменяемых замкнутых контуров из различных многопарных звеньев.
Второй этап – определен опубликованной в 1914 г. базовой работой по выделению статически определимых групп открытых кинематических цепей для образования из них структурных схем механизмов.
На основе работе , М. Грюблера и выполняются многочисленные исследования по анализу, синтезу и классификации механизмов и выпускаются технические словари с обзором механизмов, применяемых в разных областях машиностроения, а механика рассматривается, как «искусство построения машин».
Третий этап – связан с разработкой в конце XX века разными авторами компьютерных программ структурного синтеза многозвенных кинематических цепей c простыми шарнирами (так называемых «simple-jointed kinematic chains») и созданием в 1988 г. «Системы проектирования плоских рычажных механизмов», позволив
шей ему путем автоматизированного синтеза на основе единого алгоритма поиска и отбраковки изоморфных (повторяющихся) схем составить полный электронный каталог механических систем, содержащих только простые (т. е. несовмещенные) шарниры.
Наряду с этим в практике машиностроения широко применяются, как более рациональное техническое решение, разнообразные рычажные механизмы с совмещенными (сложными или комплексными «complex joints») шарнирами (например, устройство двигателя внутреннего сгорания V-образного типа; силовые приводы прессов и камнедробилки; механизм переменной структуры ножниц для резки заготовок; привод крючковых игл основовязальной трикотажной машины и др.).
Применение в технике рычажных механизмов с совмещенными шарнирами позволяет за счет более простой конструкции удешевить их изготовление (одна общая ось, замена сложных многопарных звеньев на простые двухшарнирные звенья, меньшие габариты и вес); можно получить очень компактные механизмы (за счет совмещения при необходимости у передаточного шестизвенника входного и выходного звеньев на одной оси) или расширить функциональные возможности рычажных механизмов за счет передачи вращения от одного входного на два выходных звена; кроме того упрощается расчетная схема механизма и его геометрические построения[2].
2. Структурный анализ механизма
Определим степень подвижности механизма по формуле Чебышева
W = 3n – 2p5 – p4, (1.1)
где n = 3 – число подвижных звеньев механизма (1; 2; 3);
p5 = 4 – число кинематических пар V класса (1-2; 1- 4; 2-3; 3- 4).
С учётом этого
W = 3∙3 - 2∙4 = 1.
Примем в качестве ведущего звено 1. Отсоединяем от механизма наиболее удалённую от ведущего звена группу Асcура, состоящую из звеньев 2 и 3.
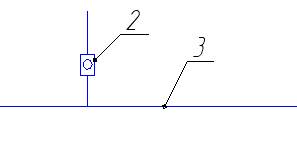
Рисунок 1. – Группа Ассура
Определяем степень подвижности W группы Ассура
W = 3∙2 - 2∙3 = 0.
где n = 2 - число подвижных звеньев механизма;
p5 = 3 – число кинематических пар V класса.
Определяем её класс, порядок, вид.
II класс, 2 порядок, 5 вид.
Определяем степень подвижности W ведущего звена 1
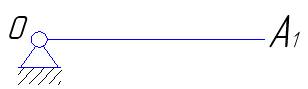
Рисунок 2 – Ведущее звено
W = 3∙1 - 2∙1 = 1, n = 1, p5 = 1
Определяем класс ведущего звена.
I класс
Структурный анализ выполнен правильно. Ведущие звенья относятся всегда к I классу.
Записываем формулу структурного строения механизма
I кл (1) + II кл (2;3). (1.2)
Т. к. в этой формуле наивысший класс группы Ассура II, то механизм относится ко II классу.
3.Определение геометрических размеров звеньев механизма
Угол перекрытия по формуле:
![]()
где ![]() -коэффициент изменения средней скорости ползуна.
-коэффициент изменения средней скорости ползуна.
![]()
Угол качания кулисы [стр. 64(1)]:
![]()
Длина кулисы [стр. 64(1)]:
![]()
где H=0.45 м-ход ползуна.
![]()
Высота сигмента [стр. 64(1)]:
![]()
![]()
Расстояние между опорой кривошипа и осью ползуна 5 [стр. 64(1)]:
![]()
где ![]() –межосевое расстояние между опорами кривошипа и кулисы.
–межосевое расстояние между опорами кривошипа и кулисы.
![]()
Длина кривошипа [стр. 64(1)]:
![]()
![]()
Масштабный коэффициент длин – это отношение истинной длины кривошипа l1 к длине отрезка в мм, изображающего его на чертеже. Приняв графическое значение длины кривошипа lOA = 53.01 мм, найдем значение Kl:

Графические значения линейных размеров находятся как отношения истинных значений к значению масштабного коэффициента длин Kl:

![]()
![]()
![]()
![]() [3]
[3]
Имея графические значения линейных размеров (длин звеньев и расстояний между опорами), строим план 12 положений механизма из одной общей точки О вращения кривошипа ОА, начиная с разбивки траектории движения точки А конца кривошипа на 12 равных частей. Методом засечек находятся положения всех звеньев механизма для каждого из 12 положений кривошипа.
Построение графика перемещения исполнительного звена.
Измерением находим перемещение точки B относительно начального положения механизма (точка 1) с учетом масштабного коэффициента:
1-1=0 мм; | 1-2=31.28 мм; | 1-3=89.55 мм; | 1-4=184.28 мм; |
1-5=265.72 мм; | 1-6=360.45 мм; | 1-7=418.72 мм; | 1-8=450 мм; |
1-9=418.72 мм; | 1-10=295.88 мм; | 1-11=154.12 мм; | 1-12=31.28 мм. |
Выберем масштабный коэффициент графика перемещения:

Рассчитаем координаты точек по оси ординаты.
![]()
y1=0 мм; | y2=7.82мм; | y3=22.39 мм; | y4=46.07 мм; |
y5=66.43 мм; | y6=90.11 мм; | y7=104.68 мм; | y8=125 мм; |
y9=104.68 мм; | y10=73.97 мм; | y11=38.53 мм; | y12=7.82 мм; |
Найдём масштабные коэффициенты по оси абцисс.
Масштабный коэффициент угла поворота кривошипа:
![]()
где L=240 мм-длина по оси абцисс.
![]()
Масштабный коэффициент времени поворота кривошипа:
![]()
где n=94 об/мин-частота вращения кривошипа.
![]()
4. Построение плана скоростей механизма
Угловая скорость вращения кривошипа определяется по формуле
 (11)
(11)
Линейная скорость точки А кривошипа равна
![]()
Масштабный коэффициент скорости KV определяется как отношение истинного значения скорости точки А кривошипа к длине отрезка в мм, изображающего эту скорость на чертеже. Приняв графическое значение скорости ![]() , найдем значение KV
, найдем значение KV
![]() .
.
Строим вектор ![]()
Для определения скорости точки A3, принадлежащей кулисе, составим векторные уравнения
![]()
где ![]()
![]()
где ![]()
![]()
Пересечение векторов ![]() образуют точку
образуют точку ![]() .
.
![]()
Строим вектор ![]()
Находим значение скорости точки А3
![]()
Для определения скорости точки В составим векторное уравнение
![]()
где ![]()
![]()
Угловая скорость кулисы равна

где ![]() - находим измерением на плане положений механизма.
- находим измерением на плане положений механизма.
![]()
![]()
Следовательно,
![]()
Скорость центра тяжести кулисы S3
![]()
где ![]()
![]()
Для определения скорости центра тяжести S5, принадлежащей ползуну 5, составим векторное уравнение[4]
![]()
где ![]()
![]()
Пересечение этих векторов образуют точку ![]()
![]()
5. Построение плана ускорений механизма
Ускорение точки А одинаково для всех положений кривошипа и равно
![]()
Т. к. движение кривошипа равномерное, по окружности, то тангенциальное ускорение

Нормальное ускорение
![]()
где ![]()
![]()
Выбираем масштабный коэффициент. Принимаем ![]() тогда
тогда

Ускорение точки А3
![]()
где ускорение Кориолиса равно
![]()
направление ![]() под углом 90˚ к
под углом 90˚ к ![]() в сторону угловой скорости
в сторону угловой скорости ![]() ;
;
![]() - релятивное ускорение.
- релятивное ускорение.
Ускорение точки А3 относительно точки С
![]()
где ![]() - ускорение точки С;
- ускорение точки С;
![]()
![]() .
.
Длина векторов на плане ускорений:
![]()
Измерением находим ![]()
Ускорение точки А3
![]()
Угловое ускорение кулисы
![]()
где АС=459.26 мм;
![]()
![]()
Ускорение точки B
![]()
Ускорение центра тяжести кулисы S3
![]()
Длина векторов на плане ускорений:
![]()

Ускорение центра тяжести ползуна B5
![]()
где ![]()
![]()
Пересечение этих векторов образуют точку b5 на плане ускорений.
![]()
![]() [5]
[5]
6. Силовой расчёт механизма
Сила полезного сопротивления, действующая на ползун, определяется согласно заданного графика технологической нагрузки.
![]()


Массы звеньев (кг), определяемые как отношение веса к ускорению свободного падения, равны:

Так как силы тяжести звеньев 2,4 малы по сравнению с технологической нагрузкой условно принимаем их массы равными нулю.
Силы инерции звеньев (Н), определяемые как произведение массы на ускорение центра тяжести.
Для звена 5.
Положение механизма 3:

Положение механизма 7:

Положение механизма 10:

Для звена 4.
![]()
Для звена 3.
Положение механизма 3:
![]()
Положение механизма 7:
![]()
Положение механизма 10:
![]()
Силы инерции направлены в сторону, противоположную ускорениям центров тяжести звеньев.
Моменты сил инерции звеньев (Н·м) определяются по уравнению
 ,
,
где IS – момент инерции массы звена относительно оси, проходящей через его центр тяжести (кг·м2),
e – угловое ускорение звена (1/с2).
Момент инерции 3 звена, для 3, 7 и 10 соответственно

![]()
![]()
Моменты сил инерции направлены в сторону, противоположную угловым ускорениям звеньев[6].
Заключение
Cтруктура любой технической системы определяется функционально связанной совокупностью элементов и отношений между ними. При этом для механизмов под элементами понимаются звенья, группы звеньев или типовые механизмы, а под отношениями подвижные или неподвижные соединения. Поэтому под структурой механизма понимается совокупность его элементов и отношений между ними, т. е. совокупность звеньев, групп или типовых механизмов и подвижных или неподвижных соединений. Геометрическая структура механизма полностью описывается заданием геометрической формы его элементов, их расположения, указания вида связей между ними. Структура механизма может быть на разных стадиях проектирования описываться различными средствами, с разным уровнем абстрагирования: на функциональном уровне - функциональная схема, на уровне звеньев и структурных групп - структурная схема и т. п.
Структурная схема - графическое изображение механизма, выполненное с использованием условных обозначений рекомендованных ГОСТ или принятых в специальной литературе, содержащее информацию о числе и расположении элементов (звеньев, групп), а также о виде и классе кинематических пар, соединяющих эти элементы. В отличие от кинематической схемы механизма, структурная схема не содержит информации о размерах звеньев и вычерчивается без соблюдения масштабов.
Как на любом этапе проектирования при структурном синтезе различают задачи синтеза и задачи анализа.
Задачей структурного анализа является задача определения параметров структуры заданного механизма - числа звеньев и структурных групп, числа и вида КП, числа подвижностей (основных и местных), числа контуров и числа избыточных связей.
Задачей структурного синтеза является задача синтеза структуры нового механизма, обладающего заданными свойствами: числом подвижностей, отсутствием местных подвижностей и избыточных связей, минимумом числа звеньев, с парами определенного вида (например, только вращательными, как наиболее технологичными) и т. п.
Список литературы
1. Попов проектирование механизмов и машин. М. Высшая школа. 2006 г.
2. Кореняко проектирование механизмов и машин. М. Высшая школа. 2007г.
3. Дунаев узлов и деталей машин / П. Ф, Дунаев, - М.: Академия, 2004.-496 с.
4. Конспект лекций по дисциплине « Теория машин и механизмов».
5. Фролова машин и механизмов / К. В, Фролова, - М.: Высшая школа., 2007. – 465с.
[1] Конспект лекций по дисциплине « Теория машин и механизмов».
[2] Попов проектирование механизмов и машин. М. Высшая школа. 2006 г.
[3] Дунаев узлов и деталей машин / П. Ф, Дунаев, - М.: Академия, 2004.-496 с.
[4] Фролова машин и механизмов / К. В, Фролова, - М.: Высшая школа., 2007. – 465с.
[5] Дунаев узлов и деталей машин / П. Ф, Дунаев, - М.: Академия, 2004.-496 с.
[6] Кореняко проектирование механизмов и машин. М. Высшая школа. 2007г.
